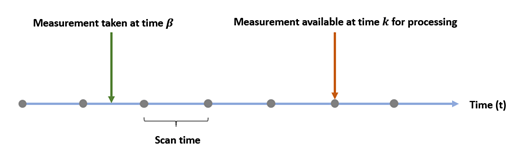
В системе слежения мультидатчика задержка может закончиться во время, в которое датчик генерирует измерение, отличающееся со времени, в которое средство отслеживания или фильтр получают измерение для обработки. Если, прежде, чем получить измерение, фильтр или средство отслеживания обновляется другим измерением с более поздней меткой времени, задержанное измерение известно как out-of-sequence measurement (OOSM). Например, примите, что измерения проведены во время β, но не доступны до временного шага k, где β <k, затем измерения, проведенные во время β, является OOSM во время вычислений k.
Обычные последовательные фильтры и объектные средства отслеживания не имеют способности обработать OOSMs правильно, потому что они только обеспечивают оценки текущего состояния и ковариации. На уровне фильтра, пропуская OOSMs может увеличить оценочные ошибочные ковариации состояния и таким образом увеличить неопределенность в оценке состояния. С другой стороны, непосредственно применение OOSM, не рассматривая время измерения может дестабилизировать оценки состояния. На уровне средства отслеживания неправильное или недостаточное использование OOSMs может дополнительно привести к ложным ассоциациям и ложным дорожкам, в то время как ценная информация, такая как предметная классификация, может быть пропущена полностью.
Sensor Fusion and Tracking Toolbox™ предоставляет эти возможности обрабатывать OOSMs.
В Sensor Fusion and Tracking Toolbox, как поведение по умолчанию, эти мультиобъектные средства отслеживания и блоки средства отслеживания сообщают об ошибке при обнаружении с OOSM:
Создание отчетов об ошибке для OOSM останавливает выполнение средства отслеживания. Используйте эту опцию, когда вы не будете ожидать OOSMs и будете полагать, что они ошибки в вашей системе слежения.
Можно задать для средства отслеживания, чтобы пропустить OOSMs путем определения OOSMHandling свойство этих мультиобъектных средств отслеживания к 'Neglect':
С этой установкой средство отслеживания пропускает любой OOSM, с которым это сталкивается и продолжает запускаться. Точно так же можно установить Out-of-sequence measurement handling parameter в этих блоках средства отслеживания к Neglect:
В большинстве случаев пренебрежение OOSM является хорошим выбором, когда система слежения обновляется с высокой частотой, такой, что потеря измерения не является очень дорогостоящей. Кроме того, эта опция не требует дополнительных операций по обработке и устройства хранения данных. Для систем слежения с низкими частотами обновления, однако, эта опция может влиять на оценочное качество состояния и может привести к неправильной ассоциации дорожки обнаружения.
Retrodiction является эффективным и эффективным подходом для обработки OOSMs. Для получения дополнительной информации на алгоритме, смотрите Retrodiction и Retro-Correction и [1]. Эта схема иллюстрирует шаги ретро коррекции и retrodiction.
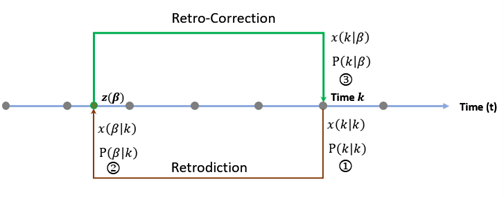
Примите, что во время k фильтр получает состояние posteriori, оценивают x (k |k) и утверждают оценочную ошибочную ковариацию P (k |k), на основе всех измерений, которые прибыли в фильтр до того времени. Кроме того, примите OOSM, взятый во время β, где β <k, теперь доступно во время k. Чтобы обработать OOSM, использующий retrodiction, фильтр первый retrodicts (предсказывает назад вовремя), ковариация состояния и состояния, чтобы получить retrodicted утверждает x (β |k) и утверждает ковариацию P (β |k). Затем с помощью z OOSM (β) и его ковариация R (β), фильтр корректирует оценку состояния и получает откорректированный ретро x состояния (k |β) и ковариация состояния P (k |β) для шага текущего времени k, включая OOSM. Обратите внимание на то, что, чтобы успешно применить алгоритм, фильтр должен сохранить оценочные ковариационные матрицы состояния от меток времени до времени OOSM β ко времени k.
Sensor Fusion and Tracking Toolbox в настоящее время предусматривает retrodiction возможность для trackingKF и trackingEKF объекты фильтра. Чтобы включить retrodiction в фильтре, задайте его MaxNumOOSMSteps свойство как положительное целое число, которое представляет количество предыдущих ковариаций состояния, сохраненных в фильтре. Затем используйте retrodict возразите функции против retrodict состояние ко времени OOSM и используйте retroCorrect возразите функции, чтобы обновить текущее состояние с помощью OOSM.
Sensor Fusion and Tracking Toolbox в настоящее время предусматривает retrodiction возможность только для trackerGNN Система object™ и блок Global Nearest Neighbor Multi Object Tracker. Включить retrodiction в trackerGNN, задайте его OOSMHandling свойство как 'Retrodiction', и задайте MaxNumOOSMSteps свойство как положительное целое число. Точно так же можно включить retrodiction в блоке Global Nearest Neighbor Multi Object Tracker через the Out-of-sequence measurements handling и параметры Maximum number of OOSM steps. В объекте средства отслеживания или блок средства отслеживания, необходимо задать функцию инициализации фильтра, которая возвращает trackingKF или trackingEKF объект.
Средство отслеживания выполняет эти шаги, чтобы обработать OOSM:
Если метка времени OOSM вне истории дорожки, обеспеченной средством отслеживания, средство отслеживания пропускает OOSM.
Если метка времени OOSM в рамках истории дорожки, обеспеченной средством отслеживания, средством отслеживания первый retrodicts все существующие дорожки ко времени OOSM. Затем средство отслеживания применяет глобальный самый близкий соседний алгоритм, чтобы попытаться сопоставить OOSM к любой из дорожек retrodicted.
Если средство отслеживания успешно сопоставляет OOSM к дорожке retrodicted, средство отслеживания обновляет дорожку retrodicted с помощью OOSM путем применения алгоритма ретро коррекции, чтобы получить текущую, откорректированную дорожку.
Если средство отслеживания не может сопоставить OOSM ни к какой дорожке retrodicted, средство отслеживания создает новый трек на основе OOSM и предсказывает дорожку к текущему времени.
trackingKF | trackingEKF | retrodict | retroCorrect | trackerGNN | trackerJPDA | trackerTOMHT | Global Nearest Neighbor Multi Object Tracker | Joint Probabilistic Data Association Multi Object Tracker | Track-Oriented Multi-Hypothesis Tracker
[1] Панель шалом, Y., Хуимин Чен и М. Маллик. “Решение с одним шагом для Многоступенчатого проблемы Измерения последовательности в Отслеживании”. Транзакции IEEE на Космических и Электронных системах 40, № 1 (январь 2004): 27–37. https://doi.org/10.1109/TAES.2004.1292140.
