Программное обеспечение Fuzzy Logic Toolbox™ поддерживает два типа нечетких систем вывода:
Системы Mamdani
Системы Sugeno
| Нечеткая система вывода | Преимущества |
|---|---|
| Mamdani |
|
| Sugeno |
|
Mamdani нечеткий вывод был сначала введен как метод, чтобы создать систему управления путем синтезирования набора лингвистических правил управления, полученных из опытных человеческих операторов [1]. В системе Mamdani выход каждого правила является нечетким множеством.
Поскольку системы Mamdani имеют более интуитивный и легче изучить основы правила, они являются подходящими к приложениям экспертной системы, где правила создаются из человеческих экспертных знаний, таких как медицинская диагностика.
Процесс вывода системы Mamdani описан в Нечетком Процессе Вывода и получен в итоге в следующем рисунке.
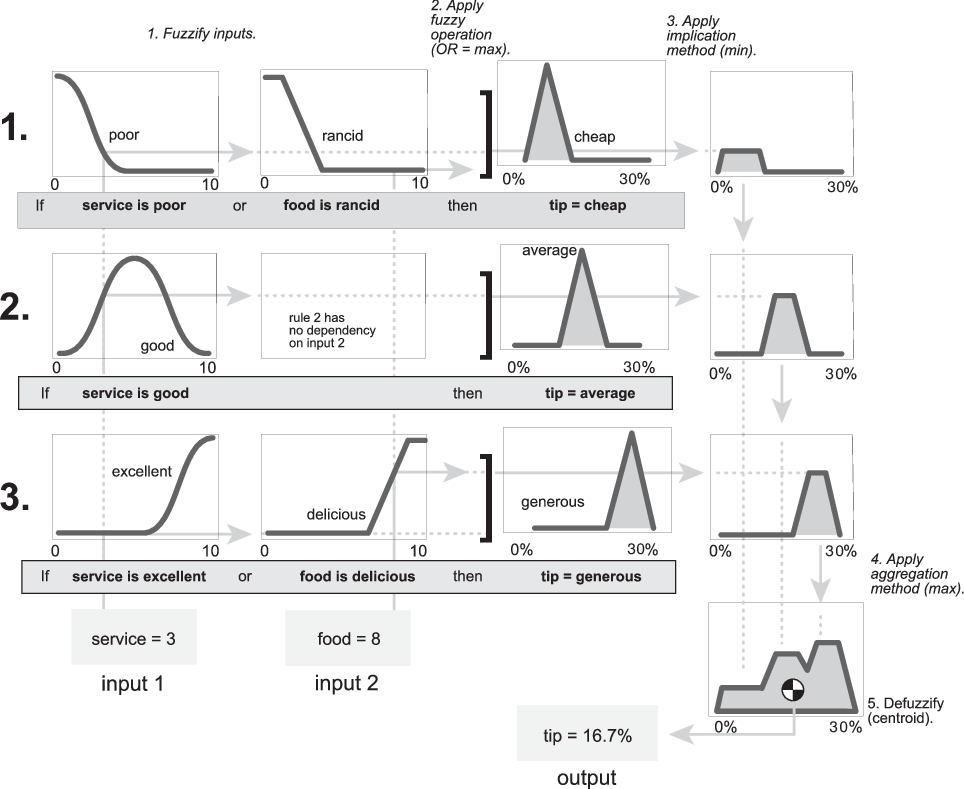
Выход каждого правила является нечетким множеством, выведенным из выходной функции принадлежности и метода значения FIS. Эти выходные нечеткие множества объединены в одно нечеткое множество с помощью метода агрегации FIS. Затем чтобы вычислить итоговое четкое выходное значение, объединенное выходное нечеткое множество является defuzzified использование одного из методов, описанных в Методах Дефаззификации.
Sugeno нечеткий вывод, также называемый Такаги-Суджено-Кангом нечеткий вывод, одиночный элемент использования вывел функции принадлежности, которые являются или постоянными или линейная функция входных значений. Процесс дефаззификации для системы Sugeno более в вычислительном отношении эффективен по сравнению с той из системы Mamdani, поскольку это использует средневзвешенную или взвешенную сумму нескольких точек данных, а не вычислите центроид двумерной области. [2]
Можно преобразовать систему Mamdani в систему Sugeno с помощью convertToSugeno функция. Получившаяся система Sugeno имеет постоянные выходные функции принадлежности, которые соответствуют центроидам Mamdani функции принадлежности выхода.
Каждое правило в системе Sugeno действует как показано в следующей схеме, которая показывает 2D входную систему с входными значениями x и y.
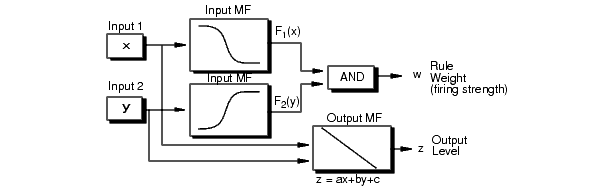
Каждое правило генерирует два значения:
zi Управляйте уровнем на выходе, который является или постоянным значением или линейной функцией входных значений:
Здесь, x и y являются значениями входа 1 и вводят 2, соответственно, и ai, bi, и ci является постоянными коэффициентами. Для нулевого порядка система Sugeno zi является константой (a = b = 0).
wi — Управляйте силой увольнения, выведенной из антецедента правила
Здесь, F 1 (...) и F 2 (...) является функциями принадлежности для входных параметров 1 и 2, соответственно.
Выход каждого правила является взвешенным уровнем на выходе, который является продуктом wi и zi.
Самый легкий способ визуализировать системы Sugeno первого порядка (a и b являются ненулевыми) состоит в том, чтобы думать о каждом правиле как об определении местоположения движущегося одиночного элемента. Таким образом, одноэлементные выходные скачки могут переместиться линейным способом в выходном пробеле, в зависимости от входных значений. Правило, запускающее силу затем, задает размер одноэлементного скачка.
Окончательный результат системы является взвешенным средним по всему правилу выходные параметры:
где N является количеством правил.
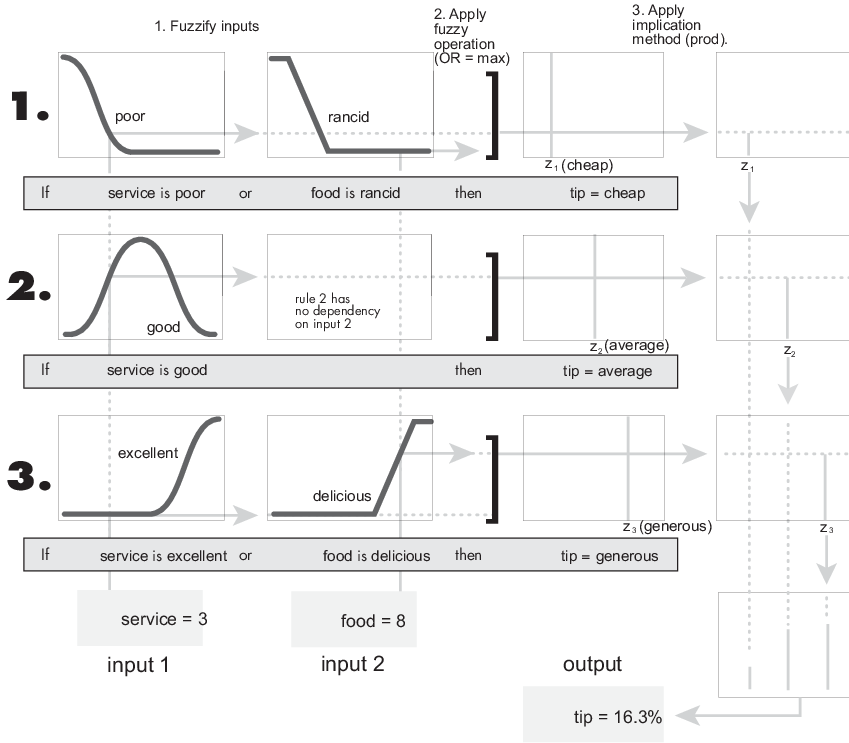
Следующий рисунок показывает нечеткий процесс вывода для системы Sugeno.
Примечание
Системы Sugeno всегда используют значение продукта и суммируют агрегацию.
Из-за линейной зависимости каждого правила о входных переменных метод Sugeno идеален для действия как супервизор интерполяции нескольких линейных контроллеров, которые должны быть применены, соответственно, к различным условиям работы динамической нелинейной системы. Например, эффективность самолета может измениться существенно с высотой и Числом Маха. Линейные контроллеры, хотя легкий, чтобы вычислить и подходящий для любого данного условия рейса, должны обновляться регулярно и гладко не отставать от изменяющегося состояния транспортного средства рейса. Нечеткая система вывода Sugeno подходит для задачи сглаженной интерполяции линейных усилений, которые были бы применены через входное пространство; это - естественный и эффективный планировщик усиления. Точно так же система Sugeno подходит для моделирования нелинейных систем путем интерполяции между несколькими линейными моделями.
[1] Mamdani, E.H., и С. Ассилиэн. ‘Эксперимент в Лингвистическом Синтезе с Контроллером Нечеткой логики’. Международный журнал Человеко-машинных Исследований 7, № 1 (январь 1975): 1–13. https://doi.org/10.1016/S0020-7373 (75) 80002-2.
[2] Sugeno, Michio, Промышленное применение редактора Нечеткого Управления. Амстердам ; Нью-Йорк : Нью-Йорк, Нью-Йорк, U.S.A: северная Голландия ; Единственные дистрибьюторы для U.S.A. и Канада, паб Elsevier Science. Ко, 1985.
