Lidar Toolbox™ предоставляет алгоритмы, функции и приложения для разработки, анализа и тестирования систем обработки лидара. Можно выполнить обнаружение объектов и отслеживание, семантическую сегментацию, подбор кривой формы, регистрацию лидара и обнаружение препятствия. Тулбокс обеспечивает рабочие процессы и приложение для перекрестной калибровки камеры лидара.
Тулбокс позволяет вам потоковые данные Velodyne® лидары и считанные данные, зарегистрированные Velodyne и IBEO, лоцируют датчики. Приложение Lidar Viewer включает интерактивную визуализацию и анализ облаков точек лидара. Можно обучить обнаружение, семантическую сегментацию и модели классификации с помощью машинного обучения и алгоритмов глубокого обучения, таких как PointPillars, SqueezeSegV2 и PointNet ++. Поддержки приложений Lidar Labeler ручная и полуавтоматическая маркировка облаков точек лидара для учебного глубокого обучения и моделей машинного обучения.
Lidar Toolbox обеспечивает лидар, обрабатывающий справочные примеры для рабочих процессов восприятия и навигации. Большинство алгоритмов тулбокса поддерживает генерацию кода C/C++ для интеграции с существующим кодом, анализом прототипа и развертыванием.
В этом примере показано, как считать и сохранить образы и данные об облаке точек из rosbag файла.
В этом примере показано, как оценить твердое преобразование между двумя облаками точек.
В этом примере показано, как совпадать с соответствующими функциями между облаками точек с помощью pcmatchfeatures функционируйте и визуализируйте их использующий pcshowMatchedFeatures функция.
Интерактивно помечайте последовательность облака точек или облако точек.
Общий обзор приложений лидара.
Интегрируйте данные о лидаре и камере.
Изучите рабочий процесс отображения и регистрация облака точек.
Обзор систем координат в Lidar Toolbox.
Что такое Lidar Toolbox?
Краткое введение в Lidar Toolbox.
Лоцируйте калибровку фотоаппарата с MATLAB
Введение, чтобы лоцировать функциональность калибровки фотоаппарата, которая является существенным шагом в объединяющихся данных из лидара и камеры в системе.
Обнаружение объектов на облаках точек лидара Используя глубокое обучение
Узнать, как использовать нейронную сеть для глубокого обучения PointPillars для 3-D обнаружения объектов на облаках точек лидара.
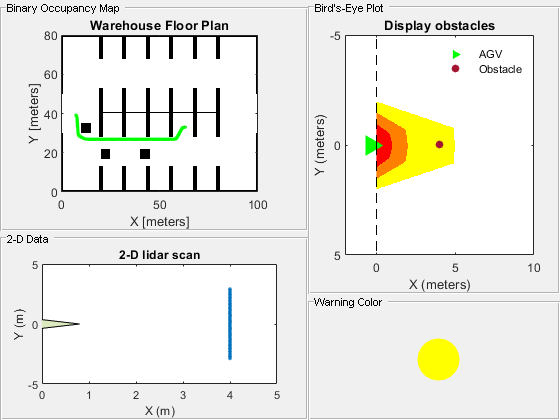
Создайте систему оповещения столкновения с 2D лидаром Используя MATLAB
Создайте систему, которая может выдать предупреждения столкновения на основе 2D сканов лидара на симулированной складской арене.







