Model Predictive Control Toolbox™ обеспечивает функции, приложение и Simulink® блоки для разработки и симуляции контроллеров, использующих линейное и нелинейное прогнозирующее управление модели (MPC). Тулбокс позволяет вам задать объект и возмущения, горизонты, ограничения и веса модели. Путем выполнения симуляций с обратной связью можно оценить эффективность контроллера.
Можно настроить поведение контроллера путем варьирования его весов и ограничений во время выполнения. Тулбокс обеспечивает развертываемые решатели оптимизации и также позволяет вам использовать пользовательский решатель. Чтобы управлять нелинейным объектом, можно реализовать адаптивные, запланированные на усиление, и нелинейные контроллеры MPC. Для приложений с быстрыми частотами дискретизации тулбокс позволяет вам сгенерировать явный прогнозирующий контроллер модели от постоянного диспетчера или реализовать приближенное решение.
Для быстрого прототипирования и реализации встраиваемой системы, включая развертывание решателей оптимизации, тулбокс поддерживает код С и IEC 61131-3 генерации Структурированного текста.
Спроектируйте прогнозирующий контроллер модели для непрерывного реактора смесителя (CSTR) с помощью MPC Designer.
Спроектируйте и симулируйте прогнозирующий контроллер модели для модели Simulink с помощью MPC Designer.
Спроектируйте и симулируйте прогнозирующий контроллер модели в MATLAB® командная строка.
Создайте и симулируйте прогнозирующий контроллер модели для объекта SISO.
Создайте и симулируйте прогнозирующий контроллер модели для объекта с несколькими входными параметрами и одним выходом.
Создайте и симулируйте прогнозирующий контроллер модели для объекта MIMO.
Введение в MPC основные концепции.
Входные параметры объекта являются независимыми переменными, которые влияют на объект и объект, выходные параметры являются зависимыми переменными, которыми вы хотите управлять или контролировать.
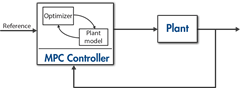
Прогнозирующие диспетчеры модели используют объект, воздействие и шумовые модели для предсказания и оценки состояния.
Диспетчеры MPC используют свое текущее состояние в качестве базиса для предсказаний. В общем случае состояния контроллера не измерены и должны быть оценены.
Прогнозирующие контроллеры модели вычисляют оптимальные перемещения управления переменными, которыми управляют, путем решения квадратичной программы в каждом контрольном интервале.
Прогнозирующий контроллер модели решатели QP преобразует задачу оптимизации MPC в общую проблему квадратичного программирования формы.
Почему использование MPC?
Изучите преимущества использования прогнозирующего управления модели.
Что такое MPC?
Изучите принципы работы прогнозирующего управления модели.

Расчетные параметры MPC
Изучите общие расчетные параметры MPC, такие как шаг расчета, горизонты, настроив веса и ограничения.
