Система механической передачи с тугим поясом, соединяющим два шкива
Simscape / Автомобильная трансмиссия / Couplings & Drives

Блок Belt Drive представляет пару шкивов, соединенных с гибким идеальным, плоским, или V-образным поясом. Когда вы устанавливаете Belt type на Ideal - No slip, пояс не уменьшается относительно поверхностей шкива.
Блок составляет трение между гибким поясом и периферией шкива. Если сила трения не достаточна, чтобы управлять загрузкой, блок позволяет промах. Отношение между силами в управлении и управляемых ветвях соответствует уравнению оси, также известному как уравнение Эйлера-Эителвайна. Блок составляет центробежную загрузку в гибком поясе, инерции шкива и подшипнике трения.
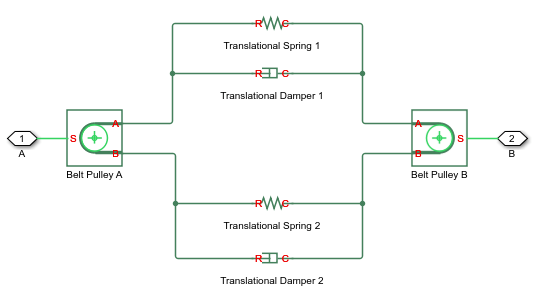
Блок Belt Drive является структурным компонентно-ориентированным на блоке Simscape™ Driveline™ Belt Pulley и Simscape блоки Translational Damper и Translational Spring.
Translational Spring и блоки Translational Damper симулируют податливость пояса. Для уравнений, управляющих динамикой контакта между поясом и шкивом, смотрите блок Belt Pulley. Рисунок показывает функциональную схему для блока Belt Drive.
Чтобы узнать больше о конструкции блока, займитесь Составными Компонентами и страницами с описанием для отдельных блоков компонента.
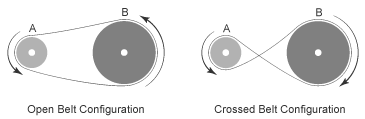
Схемы показывают открытые и пересеченные настройки ременного привода. Когда вы устанавливаете Drive type на Open belt, оба шкива имеют тенденцию вращаться в том же направлении, и более крупный шкив имеет больший пояс, переносят угол. Когда вы устанавливаете Drive type на Crossed belt, шкивы имеют тенденцию вращаться в противоположных направлениях и иметь то же самое, переносят угол.
Схемы ременного привода
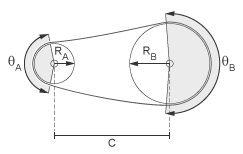
θA является углом переноса шкива A.
θB является углом переноса шкива B.
RA является эффективным радиусом шкива A.
RB является эффективным радиусом шкива B.
C является расстоянием между центрами шкивов A и B.
Когда вы устанавливаете Drive type на Open belt, блок вычисляет угол переноса пояса вокруг каждого шкива как:
Схема показывает углы переноса и параметры.
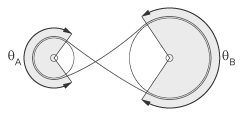
Когда вы устанавливаете Drive type на Crossed belt, эти два переносятся, углы равны и угол переноса пояса вокруг каждого шкива:
Схема показывает углы переноса и параметры.
Шкивы не переводят.
Коэффициент трения и скоростной порог трения между поясом и каждым из шкивов являются тем же самым. Чтобы параметрировать отдельные взаимодействия трения, используйте два блока Belt Pulley.
[1] Джонсон, Кеннет Л. Свяжитесь с механикой. Кембридж: Кембриджский унив. Нажмите, 2003.
