Элемент механической передачи с фрикционным поясом перенес окружность шкива
Simscape / Автомобильная трансмиссия / Couplings & Drives

Блок Belt Pulley представляет шкив, перенесенный в гибкий идеальный, плоский, или V-образный пояс. Когда вы устанавливаете Belt type на Ideal - No slip, пояс не уменьшается относительно поверхностей шкива. Можно опционально включить шкиву линейный перевод.
Блок составляет трение между гибким поясом и поверхностью шкива. Механизм натяжения уменьшается, когда загрузка превышает силу трения. Блок составляет центробежную загрузку в гибком поясе, инерции шкива и подшипнике трения.
Концы пояса могут или переместиться в то же направление или в противоположное направление.
Уравнения блока связывают механическую передачу между ветвями пояса или к или от шкива. Управление и управляемые ветви используют то же вычисление. Без достаточной силы фрикционной силы недостаточно, чтобы передать степень между шкивом и поясом.
Ваша модель допустима, когда оба конца пояса находятся в силе. Можно принять решение вывести предупреждение в Simulink® Диагностическое Средство просмотра, когда ведущий конец пояса теряет силу. При сборке модели гарантируйте, что сила обеспечена в течение симуляции путем добавления массы в по крайней мере один из концов пояса или путем добавления механизма натяжения как блок Rope. Используйте Переменное Средство просмотра, чтобы гарантировать, что любые пружины присоединили пояс, находятся в силе. Для получения дополнительной информации о создании механизма натяжения смотрите Лучшие практики для Моделирования Сетей Шкива.
Можно установить Friction model на Modal использовать модальную параметризацию для шкива. Выберите модальную параметризацию для большей числовой робастности. Чтобы включить этот параметр, установите Pulley translation на Off.
Блок Belt Pulley использует составную реализацию блока Fundamental Friction Clutch, чтобы произвести условия для модальной параметризации.
Для любой установки параметра Friction model уравнения блока относятся к этим количествам:
β является указателем направления пояса. Когда вы устанавливаете Belt direction на Ends move in same direction, β = 1. В противном случае, β =-1.
Vrel является относительной скоростью между периферией шкива и поясом. Vrel = 0, когда Belt type является Ideal - No slip.
VA является линейной скоростью ветви A.
VB является линейной скоростью ветви B.
VC является линейной скоростью шкива в его центре. Если Pulley translation является Off, блок ограничивает это к 0.
ωS является скоростью вращения поверхности контакта шкива.
R является радиусом шкива.
Fcentrifugal является центробежной силой пояса.
FC является силой, действующей через центроид шкива. Когда вы задаете значение для Inertia, FC включает силу из-за ускорения массы шкива.
ρ является поясом линейная плотность.
Ffr является силой трения между шкивом и поясом.
FA является силой, действующей вдоль ветви A.
FB является силой, действующей вдоль ветви B.
θ является контактом, переносят угол.
τS является крутящим моментом шкива.
Кинематические ограничения между шкивом и поясом:
Когда вы устанавливаете Belt type на любой V-belt или Flat belt и набор Centrifugal force к Model centrifugal force, центробежная сила:
Когда Pulley translation является Off, уравнение балансировки силы:
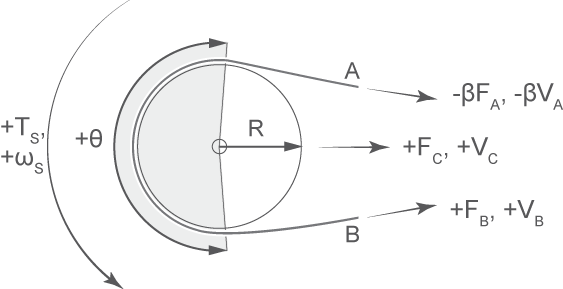
Соглашение знака таково это, когда Belt direction является Ends move in opposite direction, положительное вращение в порте S приводит к отрицательному переводу для порта A и положительному переводу для порта B.
Чтобы включить параметр Friction model, установите Belt type на Flat belt или V-belt и Pulley translation к Off.
Когда вы устанавливаете Friction model на Continuous, уравнения блока относятся к этим количествам:
μ является параметром Contact friction coefficient.
μsmoothed является мгновенным значением коэффициента трения.
Vthr является параметром Velocity threshold.
b является вязким затуханием подшипника.
Fthr является параметром Force threshold.
Мгновенный коэффициент трения является функцией относительной скорости, таким образом что
где гиперболическая функция тангенса обеспечивает числовую робастность путем обеспечения сглаженного и непрерывного выхода для нулевых пересечений Vrel.
Для V-пояса блок получает значение трения контакта с помощью sheave угла:
где:
μsheave является эффективным коэффициентом трения.
Φ является sheave углом.
Для плоского пояса, μsheave = μ.
Скоростной порог трения управляет шириной области, в которой коэффициент трения изменяет свое значение от нуля до установившегося максимума. Скоростной порог трения задает скорость, при которой гиперболическая касательная равняется 0.999. Чем меньший значение, тем более крутой изменение μ.
Блок определяет эффект трения на силе в концах пояса как:
который следует за формой уравнения оси, также известного как уравнение Эйлера-Эителвайна. Крутящий момент, действующий на шкив,
где σ = 1, когда вы устанавливаете Belt type на Ideal - No slip. В противном случае,
Для V-пояса блок получает статические и кинетические значения трения при помощи sheave угла:
где:
μStatic является параметром Static friction coefficient.
μStatic,sheave является эффективным статическим коэффициентом трения.
μKinetic является параметром Kinetic friction coefficient.
μKinetic,sheave является эффективным кинетическим коэффициентом трения.
Φ является sheave углом.
Для плоского пояса, μStatic,sheave = μStatic и μKinetic,sheave = μKinetic.
Когда вы устанавливаете Friction model на Modal, блок вычисляет максимальную статическую силу трения прежде, чем уменьшиться как
где FFriction,Static,Max является максимальной величиной силы из-за статического трения, и FDrive является силой, должной натягивать чувствовавший в конце шкива с самой большой величиной силы. Во время промаха,
где μKinetic,sheave является кинетическим коэффициентом трения. Блок разрешает использование баланса крутящего момента
и
где Simscape™ регистрирует RFFriction как fundamental_clutch.torque.
Блок принимает несоблюдение вдоль пояса.
Блок принимает, что оба конца пояса обеспечивают соответствующую силу в течение симуляции.
Блок обрабатывает перевод центра шкива как плоский, где перемещения шкива вдоль того, чтобы делить пополам шкива переносят угол. Центральная скорость VC и сила FC только составляет компонент вдоль этой линии движения.
Уравнение Eytelwein для трения пояса пропускает эффект перевода шкива на трении.
[1] Джонсон, Кеннет Л. Свяжитесь с механикой. Кембридж: Кембриджский унив. Нажмите, 2003.


