Физическое соединение, которое включает передачу силы
Simscape / Автомобильная трансмиссия / Couplings & Drives
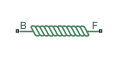
Блок Rope представляет элемент, который передает силу между двумя контактными точками. Можно обработать его как произвольное устройство переноса силы, чтобы симулировать множество ситуаций, включая сети шкива, диски кабеля и змеевидные пояса. Можно выбрать, показывает ли блок слабый на потерю силы. Блок имеет основной порт, B, и порт последователя, F. Веревка простирается в силе, когда основной порт приводит порт последователя.
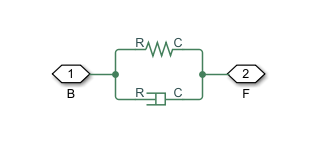
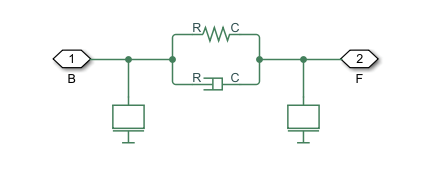
Блок рассматривает только продольное поступательное движение и силу концов веревки. Для идеального случая блок эквивалентен пружинному демпферу или системам пружинного массового демпфера, проиллюстрированным на рисунках, в зависимости от того, принимаете ли вы решение смоделировать массу. Эти фигуры не обязательно применяются, когда вы симулируете слабый.
Совет
Подтвердите, что ваша модель выполняет правильно с набором Rope model к Ideal - No tension. В то время как в этом режиме, проверьте, что порты B и F ориентированы правильно путем просмотра графиков силы каждого, вовлекают в Simscape Results Viewer и поиске неожиданных отрицательных величин.
Вы симулируете веревку с произвольными физическими свойствами путем корректировки параметров блоков. Блок Rope может действовать как пояс, кабель или любое другое устройство, которое имеет предел прочности и передает силу между двумя контактными точками. Контактная точка может быть шкивом, барабаном или идеальным источником.
Блок полезен для моделирования стационарного или сети шкива перемещения. Можно управлять блоком Rope с источниками как блок Ideal Translational Velocity Source или блок Rope Drum, присоединенный к блоку Ideal Force Source.
Для большей точности или числовой устойчивости, можно принять решение смоделировать воздействие массы в системе. Когда вы устанавливаете Model mass на On, блок распределяет половину общей массы любому концу веревки. Добавление даже небольшого количества массы может улучшить инициализацию вашей модели. Можно также задать начальные условия веревки. Если вы примете решение симулировать слабый, блок прекратит применять жесткость и ослаблять, когда веревка больше не будет в силе.
Блок Rope характеризует внешнюю загрузку в основном порте как
и в порте последователя,
где . Силы варьируются как функции времени и деформации фрагмента, xs. Здесь, K и B являются функциями xs, такого что когда там не слабо, или вы не симулируете слабый. В противном случае, когда слабый происходит. Таким образом, когда . Та же логика запрашивает B. Проигнорируйте массовые термины, если вы не моделируете массу.
Переменные имеют следующие значения:
F является силой силы, где
K является пружинным коэффициентом жесткости. когда вы устанавливаете Rope model на Model rope slack и .
D является коэффициентом демпфирования.
m является общей массой. Это эквивалентно параметру Mass. Блок распределяет половину общей массы каждому концу.
xB является положением основного узла.
xF является положением узла последователя.
xs является деформацией из-за протяжения. Это эквивалентно переменной Stretch.
ẋs является скоростью фрагмента.
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Шкив пояса | Барабан веревки | Идеальный источник силы | Идеальный поступательный скоростной источник | Поступательный жесткий упор


