Примените силы контакта между парой связанных тел
Simscape / Мультитело / Силы и Крутящие моменты

Блок Spatial Contact Force моделирует контакт между парой тел с помощью метода штрафа. Этот метод позволяет телам проникать небольшое количество, чтобы вычислить силы контакта. Блок применяет нормальные и фрикционные силы контакта между связанной основой и телами последователя.
Нормальная сила контакта вычисляется с помощью уравнения силы классической системы пружинного демпфера. Во время контакта нормальная сила контакта пропорциональна своей соответствующей глубине проникновения и скорости. Transition Region Width задает транзитную область к уравнениям силы. В то время как глубина проникновения перемещается через область перехода, блок гладко подъемы сила. В конце области перехода применяются полная жесткость и затухание. На восстановлении и жесткость и ослабляющие силы гладко уменьшены назад, чтобы обнулить. Этот плавный переход устраняет разрывы из уравнений силы и устраняет события пересечения нулем. Чем больше Transition Region Width, тем более сглаженный тренд перехода силы контакта. В отличие от этого, когда Transition Region Width уменьшается к нулю, сила контакта имеет тенденцию иметь более резкий переход, который ведет себя как прерывистая проблема.
Чтобы лучше обнаружить контакты, когда значение Transition Region Width мало, блок Spatial Contact Force поддерживает дополнительное обнаружение пересечения нулем. События пересечения нулем только имеют место, когда разделительное расстояние изменяется от положительного или нуля к отрицанию и наоборот.
Примечание
Обнаружение пересечения нулем блока Spatial Contact Force отличается с исходным обнаружением пересечения нулем Simulink® блоки, такие как From File и Integrator, потому что уравнение силы Spatial Contact Force непрерывно. Для получения дополнительной информации обнаружения пересечения нулем блоков Simulink, смотрите Обнаружение Пересечения нулем.
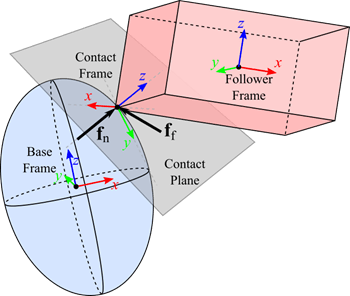
Каждое тело имеет систему координат контакта со своим источником, расположенным в контактной точке и своей осью z, выровненной с контактом нормальное направление. Когда поверхность является гладкой около контактной точки, нормальный контакт является исходящей поверхностью, нормальной в контактной точке. Когда поверхность не является гладкой, нормальный контакт вычисляется с помощью других средних значений, но это всегда указывает исходящий от тела около контактной точки. Во время непрерывного контакта система координат контакта перемещает тело, когда контактная точка перемещается.
Схема показывает систему координат контакта для основного тела. Силы контакта применяются к двум твердым телам в начале координат системы координат контакта в соответствии с Третьим Законом Ньютона:
Нормальная сила, fn, который выравнивается с осью z системы координат контакта. Эта сила продвигает твердые тела независимо для того, чтобы уменьшать проникновение.
Фрикционная сила, ff, который находится в плоскости контакта. Эта сила выступает против относительных тангенциальных скоростей между этими двумя телами около области проникновения.
Блок Spatial Contact Force поддерживает множество конфигураций и тел. Например, это поддерживает все твердые блоки в библиотеке Body Elements и Infinite Plane и блоки Point в библиотеке Curves и Surfaces.
Примечание
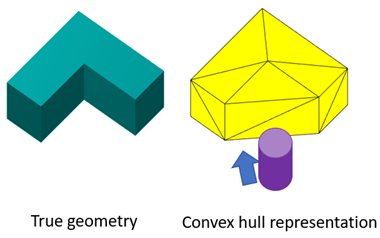
Для File Solid и блоков Revolved Solid, их физические свойства, такие как масса и инерция, основаны на истинной геометрии, но моделирование контакта основано на геометрии выпуклой оболочки. Для примера смотрите следующую фигуру.
Контакты между твердыми частицами
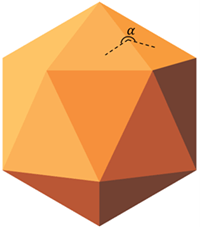
Выпуклые оболочки обычно используются, чтобы представлять геометрический контур, когда истинная геометрия представляет алгоритмическую сложность. Выпуклая оболочка является самым маленьким выпуклым многогранником, который содержит все вершины истинной геометрии. Для выпуклой оболочки внешний угол (α) между парой смежных поверхностей должен быть больше или быть равен 180 градусам.
Выпуклая оболочка
Stiffness — Сопротивление пружины контакта к геометрическому проникновению1e6 N/m (значение по умолчанию)Пружинная жесткость является постоянным значением, которое представляет силу контакта двух сталкивающихся твердых тел. Чем больше значение пружинной жесткости, тем тяжелее контакт между твердыми элементами тела.
Damping — Сопротивление демпфера контакта, чтобы двинуться, в то время как конфигурации проникают1e3 N/(m/s) (значение по умолчанию)Коэффициент демпфирования является постоянным значением, которое представляет потерянную энергию от сталкивающихся твердых тел. Чем больше значение коэффициента демпфирования, тем больше энергии потеряно, когда конфигурации сталкиваются и быстрее, колебания контакта ослаблены. Значение нуля может использоваться к совершенно упругим соударениям модели, которые сохраняют энергию.
Transition Region Width — Область, по которой сила пружинного демпфера повышает до своего полного значения1e-4 m (значение по умолчанию)Ширина области перехода, описанная как глубина проникновения. Чем меньший область, тем более резкое начало контакта и меньшего такт требуется для решателя. Сокращение области перехода улучшает точность модели, в то время как расширение его улучшает скорость симуляции.
Method — Фрикционный закон о силеSmooth Stick-Slip (значение по умолчанию) | NoneФрикционная сила является силой, которая находится мимоходом в системе координат контакта и перпендикуляре к нормальной силе. Выбор Smooth Stick-Slip производит более реалистическую динамику контакта.
Smooth Stick-SlipКогда Smooth Stick-Slip выбран, фрикционная сила непрерывна относительно относительной тангенциальной скорости около области проникновения. Этот график показывает, как сила трения затронута:
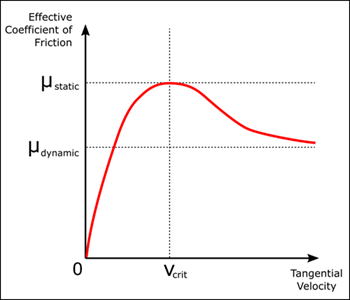
μstatic является коэффициентом статического трения, μdynamic является коэффициентом динамического трения, и vcrit является критической скоростью.
NoneКогда None выбран, никакая фрикционная сила не прикладывается.
Coefficient of Static Friction — Отношение величины фрикционной силы к величине нормальной силыОтношение величины фрикционной силы к величине нормальной силы, когда тангенциальная скорость близко к нулю.
Это значение определяется свойствами материала связывающихся твердых тел. Это всегда неотрицательно и часто меньше один, несмотря на то, что значения, больше, чем, каждый возможен для материалов высокого трения. В большинстве случаев это значение должно быть выше, чем Coefficient of Dynamic Friction.
Чтобы включить этот параметр, установите Method на Smooth Stick-Slip.
Coefficient of Dynamic Friction — Отношение величины фрикционной силы к величине нормальной силыОтношение величины фрикционной силы к величине нормальной силы, когда тангенциальная скорость является большой.
Это значение определяется свойствами материала связывающихся твердых тел. Это всегда неотрицательно и часто меньше один, несмотря на то, что значения, больше, чем, каждый возможен для материалов высокого трения. В большинстве случаев это значение должно быть ниже, чем Coefficient of Static Friction.
Чтобы включить этот параметр, установите Method на Smooth Stick-Slip.
Critical Velocity — Скорость, которая определяет смешивание между статическими и динамическими коэффициентами трения1e-3 m/s (значение по умолчанию)Когда критическая скорость равна величина тангенциальной скорости, эффективный коэффициент трения равен заданному Coefficient of Static Friction. Как величина тангенциальных скоростных увеличений вне этого значения, эффективный коэффициент трения асимптотически приближается к заданному Coefficient of Dynamic Friction.
Чтобы включить этот параметр, установите Method на Smooth Stick-Slip.
Separation Distance — Расстояние между двумя твердыми теламиcleared (значение по умолчанию) | проверяемыйВыберите, чтобы измерить разделительное расстояние между двумя твердыми телами. Если два твердых тела не проникают, это - неотрицательное значение, равное минимальному расстоянию между этими двумя конфигурациями. Если два твердых тела проникают, это - отрицательная величина, равная глубине проникновения.
Normal Force — Величина нормальной силы контакта между двумя связанными твердыми теламиcleared (значение по умолчанию) | проверяемыйВыберите, чтобы измерить величину нормальной силы контакта между двумя связанными твердыми телами.
Frictional Force Magnitude — Величина фрикционной силы контакта между двумя связанными твердыми теламиcleared (значение по умолчанию) | проверяемыйВыберите, чтобы измерить величину фрикционной силы контакта между двумя связанными твердыми телами.
Detect Contact Start and End — Обнаружьте начало и конец контактов как события пересечения нулемcleared (значение по умолчанию) | проверяемыйВыберите, чтобы обнаружить начало и конец каждого контакта как события пересечения нулем. События пересечения нулем имеют место, когда разделительное расстояние изменяется от положительного или нуля к отрицанию и наоборот.
Brick Solid | Cylindrical Solid | Extruded Solid | Spherical Solid | Тело файла





