Твердый цилиндрический элемент с геометрией, инерцией и цветом
Simscape / Мультитело / Элементы Тела

Блок Cylindrical Solid является цилиндрической формой с центром геометрии, совпадающим с источником системы координат и осью симметрии, совпадающей с осью z системы координат.

Блок Cylindrical Solid добавляет в присоединенную систему координат твердый элемент с геометрией, инерцией и цветом. Твердым элементом может быть простое твердое тело или часть составного твердого тела — группа жестко соединенных твердых частиц, часто разделяемых на пробеле посредством твердых преобразований. Объедините Cylindrical Solid и другие твердые блоки с блоками Rigid Transform, чтобы смоделировать составное твердое тело.
Параметры геометрии включают форму и размер. Можно выбрать из списка предварительно установленных форм или импортировать пользовательскую форму из внешнего файла в формате ШАГА или STL. По умолчанию, для всех кроме выведенных из STL форм, блок автоматически вычисляет массовые свойства тела от заданной геометрии и или массовая или массовая плотность. Можно изменить эти настройки в Inertia> параметры блоков Type.
Система координат кодирует положение и ориентацию тела. В настройке по умолчанию блок обеспечивает только систему координат. Интерфейс создания системы координат обеспечивает средние значения, чтобы задать дополнительные системы координат на основе функций геометрии тела. Вы получаете доступ к этому интерфейсу путем нажатия кнопки Create![]() в Frames расширяемая область.
в Frames расширяемая область.
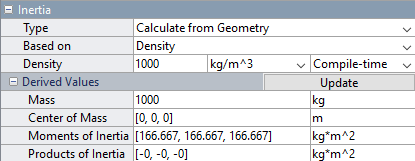
Можно просмотреть расчетные значения твердых массовых свойств непосредственно в диалоговом окне блока. Установка Inertia> параметр Type к Calculate from Geometry заставляет блок отсоединять новый узел, Derived Values. Нажмите кнопку Update, обеспеченную под этим узлом, чтобы вычислить массовые свойства и отобразить их значения в полях ниже кнопки.
Отображение Derived Values
Диалоговое окно блока содержит разборную панель визуализации. Эта панель обеспечивает мгновенную визуальную обратную связь на теле, которое вы моделируете. Используйте его, чтобы найти и устранить любые проблемы с формой и цветом тела. Можно исследовать тело с разных точек зрения путем выбора стандартного представления или путем вращения, панорамируя и масштабируя тело.
Нажмите кнопку Update Visualization![]() , чтобы просмотреть последние изменения в геометрии тела в панели визуализации. Выберите Apply или OK, чтобы передать ваши изменения в теле. Закрытие диалогового окна блока без первого Apply выбора или OK заставляет блок отменять те изменения.
, чтобы просмотреть последние изменения в геометрии тела в панели визуализации. Выберите Apply или OK, чтобы передать ваши изменения в теле. Закрытие диалогового окна блока без первого Apply выбора или OK заставляет блок отменять те изменения.
Цилиндрическая твердая панель визуализации

Щелкните правой кнопкой по панели визуализации, чтобы получить доступ к визуализации контекстно-зависимое меню. Это меню предоставляет дополнительные возможности так, чтобы можно было изменить цвет фона, разделить панель визуализации в несколько мозаик и изменить вид представления на установке +Z up (XY Top) по умолчанию.
Radius — Радиус цилиндра1 m (значение по умолчанию) | скаляр с единицами длиныРасстояние между осью цилиндра и его поверхностью.

Length — Длина цилиндра1 m (значение по умолчанию) | скаляр с единицами длиныРасстояние между противостоящими концами цилиндра.

Entire Geometry — Экспортируйте истинную геометрию блокаoff (значение по умолчанию) | onВыберите Entire Geometry, чтобы экспортировать истинную геометрию блока Cylindrical Solid, который может использоваться для других блоков, таких как блок Spatial Contact Force.
Чтобы включить эту опцию, выберите Entire Geometry под Export.
Type — Параметризация инерции, чтобы использоватьCalculate from Geometry (значение по умолчанию) | Point Mass | CustomПараметризация инерции, чтобы использовать. Выберите Point Mass смоделировать сконцентрированную массу с незначительной вращательной инерцией. Выберите Custom смоделировать распределенную массу с заданными моментами и продуктами инерции. Настройка по умолчанию, Calculate from Geometry, позволяет блоку автоматически вычислить вращательные свойства инерции от геометрии тела и заданной массовой или массовой плотности.
Based on — Параметр, чтобы основывать вычисление инерции наDensity (значение по умолчанию) | MassПараметр, чтобы использовать в вычислении инерции. Блок получает тензор инерции из геометрии тела и выбранного параметра. Используйте Density если свойства материала известны. Используйте Mass если общая твердая масса, если известный.
Density — Масса на единичный объем материала1000 kg/m^3 (значение по умолчанию)Масса на единичный объем материала. Массовая плотность может взять положительную или отрицательную величину. Задайте отрицательную массовую плотность, чтобы смоделировать эффекты пустоты или полости в твердом теле.
Calculate from Geometry: Derived Values — Отображение расчетных значений массовых свойствОтображение расчетных значений твердых массовых свойств — масса, центр массы, моменты инерции и продукты инерции. Нажмите кнопку Update, чтобы вычислить и отобразить массовые свойства тела. Нажмите эту кнопку после любых изменений в параметрах блоков, чтобы гарантировать, что отображенные значения являются все еще текущими.
Центр массы разрешен в системе координат локальной ссылки тела. Моменты и продукты инерции каждый разрешены в системе координат инерции разрешения — система координат, оси которой параллельны тем из системы координат, но чей источник совпадает с солидным центром массы.
Опция, чтобы вычислить и отобразить массовые свойства активна, когда Inertia> параметры блоков Type установлен в Calculate from Geometry.
Type — Графический, чтобы использовать в визуализации телаFrom Geometry (значение по умолчанию) | Marker | NoneВыбор графических использовать в визуализации тела. Диаграмма является по умолчанию геометрией, заданной для тела. Выберите Marker показать вместо этого простой графический маркер, такой как сфера или куб. Измените этот параметр в None устранить это тело в целом из визуализации модели.
Marker: Shape — Форма маркера, чтобы присвоить телуSphere (значение по умолчанию) | Cube | FrameФорма маркера, посредством которого можно визуализировать тело. Движение маркера отражает движение самого тела.
Marker: Size — Ширина маркера в пикселяхШирина маркера в пикселях. Эта ширина не масштабируется с уровнем изменения масштаба. Обратите внимание на то, что очевидный размер маркера зависит частично от разрешения экрана с более высокими разрешениями, упаковывающими больше пикселей на единицу длины, и поэтому производящими меньшие значки.
Show Port R — Покажите порт системы координат для связи с другими блокамиВыберите, чтобы осушить порт R.
New Frame — Создайте пользовательскую систему координат для связи с другими блокамиНажмите кнопку Create![]() , чтобы открыть панель для создания новой присоединенной к телу системы координат. В этой панели можно задать имя, источник и ориентацию для системы координат.
, чтобы открыть панель для создания новой присоединенной к телу системы координат. В этой панели можно задать имя, источник и ориентацию для системы координат.
Чтобы назвать пользовательскую систему координат, кликните по текстовому полю параметра Frame Name. Имя идентифицирует соответствующий порт на твердом блоке и в области просмотра в виде дерева Mechanics Explorer.
Чтобы выбрать Frame Origin пользовательской системы координат, используйте один из следующих методов:
At Reference Frame Origin: Сделайте новую систему координат совпадающей с источником системы координат тела.
At Center of Mass: Сделайте новую систему координат совпадающей с центром массы тела.
Based on Geometric Feature: Сделайте новую систему координат совпадающей с центром выбранной функции. Допустимые функции включают поверхности, линии и точки. Выберите функцию из панели визуализации, затем нажмите Use Selected Feature, чтобы подтвердить местоположение источника. Имя местоположения источника появляется в поле ниже этой опции.
Чтобы задать ориентацию пользовательской системы координат, под разделом Frame Axes, выбирают Primary Axis и Secondary Axis пользовательской системы координат и затем задают их направления.
Используйте следующие методы, чтобы выбрать вектор для определения направлений первичных и вторичных осей. Первичная ось параллельна выбранному вектору и ограничивает остающиеся две оси к своей нормальной плоскости. Вторичная ось параллельна проекции выбранного вектора на нормальную плоскость.
Along Reference Frame Axis: Выбирает ось системы координат тела.
Along Principal Inertia Axis: Выбирает ось основной оси инерции тела.
Based on Geometric Feature: Выбирает вектор, сопоставленный с выбранным признаком геометрии тела. Допустимые функции включают поверхности и линии. Соответствующий вектор обозначается белой стрелой в панели визуализации. Можно выбрать функцию из панели визуализации и затем нажать Use Selected Feature, чтобы подтвердить выбор. Имя выбранной функции появляется в поле ниже этой опции.
FrameN — Отредактируйте или удалите существующую пользовательскую систему координатСистемы координат, которые вы создали. N уникальный номер идентификации для каждой пользовательской системы координат.
Кликните по текстовому полю, чтобы отредактировать имя существующей пользовательской системы координат.
Нажмите кнопку Edit![]() , чтобы отредактировать другие аспекты пользовательской системы координат, такие как источник и оси.
, чтобы отредактировать другие аспекты пользовательской системы координат, такие как источник и оси.
Нажмите кнопку Delete![]() , чтобы удалить пользовательскую систему координат.
, чтобы удалить пользовательскую систему координат.
Чтобы включить этот параметр, создайте систему координат путем нажатия на New Frame.
Variable Brick Solid | Variable Cylindrical Solid | Variable Spherical Solid | Rigid Transform


