Robotics System Toolbox™ служит основой co-симуляции, которая позволяет вам использовать алгоритмы робототехники в MATLAB® и Simulink® и визуализируйте их эффективность в виртуальной среде симуляции. Эта среда использует Средство моделирования Gazebo.
Понимание, как эта среда симуляции работы может помочь вам диагностировать проблемы и настроить ваши модели.
Когда вы используете Robotics System Toolbox, чтобы запустить ваши алгоритмы, MATLAB или Simulink co-simulates алгоритмы в среде симуляции.
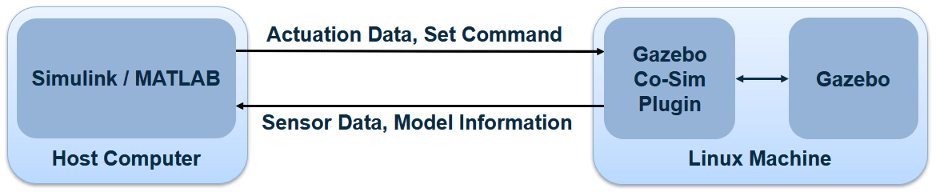
На хосте - компьютере, Simulink или MATLAB отправляет данные о приведении в действие и команды набора к Плагину Co-симуляции Gazebo на целевой машине Linux. Плагин передает эту информацию Средству моделирования Gazebo, которое возвращает данные о датчике и информацию модели через плагин к Simulink или MATLAB на хосте - компьютере.
Схема обобщает связь между MATLAB или Simulink и средой симуляции.
Во время co-симуляции можно приостановить Simulink, и Средство моделирования Gazebo в любое время с помощью Делают паузу. Gazebo приостанавливает один временной шаг перед симуляцией.

Разрыв происходит из-за последовательности co-времени-симуляции:

Данными о датчике и командами приведения в действие обмениваются на правильном временном шаге. Выполнение продвигается Gazebo сначала, затем Simulink. Когда приостановлено, выполнение симуляции все еще в то время шаг, выполняемый Gazebo, но Simulink остается на предыдущем разе шага, пока вы не возобновляете модель.
