Robotics System Toolbox™ служит основой co-симуляции, которая позволяет вам использовать алгоритмы робототехники в MATLAB® и Simulink® и визуализируйте их эффективность в виртуальной среде симуляции. Эта среда использует Средство моделирования Gazebo. Для получения дополнительной информации о среде симуляции смотрите Как Симуляция Gazebo для работ Robotics System Toolbox.
Этот инструмент симуляции обычно используется, чтобы добавить действительные данные при разработке, тестируя и проверяя эффективность алгоритмов робототехники.
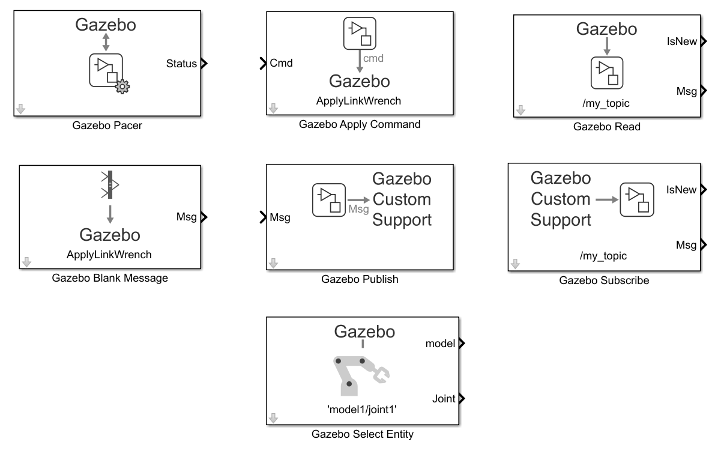
Robotics System Toolbox> библиотека блоков Gazebo Co-Simulation содержит блоки Simulink, связанные со средой симуляции. Чтобы просмотреть библиотеку, в командной строке MATLAB, вводят robotgazebolib.
| Блок | Описание |
|---|---|
| Gazebo Apply Command | Отправьте команду в средство моделирования Gazebo |
| Gazebo Blank Message | Создайте пустую команду Gazebo |
| Gazebo Pacer | Настройки для синхронизируемого продвижения между Gazebo и Simulink |
| Gazebo Read | Получите сообщения от сервера Gazebo |
| Gazebo Publish | Отправьте пользовательские сообщения в сервер Gazebo |
| Gazebo Subscribe | Получите пользовательские сообщения от сервера Gazebo |
| Gazebo Select Entity | Выберите сущность Gazebo |
Это функции MATLAB, связанные со средой симуляции.
| Функция | Описание |
|---|---|
gzinit | Инициализируйте настройки подключения для интерфейса Gazebo Co-Simulation MATLAB |
gzjoint | Присвойте и получите информацию о соединении модели Gazebo |
gzlink | Присвойте и получите информацию о ссылке модели Gazebo |
gzmodel | Присвойте и получите информацию о модели Gazebo |
gzworld | Взаимодействуйте с миром Gazebo |
gazebogenmsg | Сгенерируйте зависимости для Gazebo пользовательская поддержка сообщения |
packageGazeboPlugin | Создайте сменный блок Gazebo для Simulink |
