Снижение сложности модели из нормированной взаимно-простой факторизации
ncfmr вычисляет приближение уменьшаемого порядка модели путем усечения режимов во взаимно-простой факторизации модели полного порядка. Этот метод связан со сбалансированным методом усечения balred, но это является особенно подходящим к сокращению порядка контроллера. Для стабилизировавшегося контроллера уменьшаемый контроллер также стабилизировался, пока ошибка приближения меньше, чем поле робастности, вычисленное ncfmargin.
[ вычисляет приближение уменьшаемого порядка модели Gred,info] = ncfmr(G,ord)G динамической системы. Задайте желаемый порядок сокращения как ord. Если ord вектор, затем Gred массив приближений соответствующего порядка. Структура info содержит информацию о расчете, таком как границы при ошибке приближения.
[~, вычисляет взаимно-простую факторизацию info] = ncfmr(G)G данный [M,N] таким образом, что G = M\N (см. lncf), сингулярные значения Ганкеля факторизации и ошибочные границы. Можно использовать эту информацию, чтобы определить целевой порядок сокращения программно на основе желаемой точности или устойчивых факторов устойчивости. Затем используйте синтаксис Gred = ncfmr(G,ord,info) вычислить модель уменьшаемого порядка.
Gred = ncfmr(G,ord,info)info. Получите info с помощью предыдущего синтаксиса, [~,info] = ncfmr(G). Обеспечение ранее вычисленного info к ncfmr позволяет вам выполнять снижение сложности модели, не имея необходимость повторно вычислять факторизацию и сингулярные значения Ганкеля. Этот синтаксис поэтому особенно полезен, когда эффективность является беспокойством.
ncfmr(G) строит сингулярные значения Ганкеля и границы при ошибке приближения, соответствующей каждому порядку. Исследуйте график определить уменьшаемый порядок на основе желаемой точности или устойчивых факторов устойчивости. Можно затем использовать Gred = ncfmr(G,ord) вычислить модель уменьшаемого порядка.
ncfmr вычисляет сингулярные значения Ганкеля и ошибки приближения помочь вам выбрать подходящий целевой порядок сокращения. Один способ сделать так состоит в том, чтобы исследовать график этих значений. Загрузите модель объекта управления с 30 состояниями G.
load("ncfmrModel.mat","G") size(G)
State-space model with 2 outputs, 3 inputs, and 30 states.
Вызовите ncfmr без выходного аргумента. Функция генерирует график сингулярного значения Ганкеля, который показывает относительные энергетические вклады каждого состояния во взаимно-простой факторизации G, расположенный в порядке убывания энергией. График также показывает верхнюю границу при ошибке между исходными моделями и моделями уменьшаемого порядка, что вы получаете путем усечения состояний в той точке. Исследуйте этот график выбрать целевой порядок. Например, для максимальной погрешности 0,01, можно уменьшать модель до 13-го порядка.
ncfmr(G)

Вызовите ncfmr снова с выходным аргументом и использованием order = 13. Выполнение так вычисляет упрощенную модель Gred. Исследуйте сингулярные значения G и различия между G и Gred. Различие очень мало через все частоты, показывая, что модель уменьшаемого порядка является хорошим приближением модели полного порядка.
Gred = ncfmr(G,13); sigma(G,G-Gred) legend("G","G-Gred")

Когда вы используете ncfmr уменьшать объект G или контроллер K для которого ответ с обратной связью feedback(G*K,eye(n)) устойчиво, получившийся ответ с обратной связью также устойчив, пока ошибка приближения упрощенной модели не превышает поле робастности, вычисленное ncfmargin. Видеть это преимущество ncfmr, загрузите объект G и спроектируйте контроллер для него. В данном примере используйте ncfsyn спроектировать контроллер.
load ncfmrStability.mat G size(G)
State-space model with 1 outputs, 1 inputs, and 3 states.
% shaping weights s = tf('s'); W1 = 3.35*tf([1 20.89],[1 0]); W2 = 1; % controller [K,~,~,Kinfo] = ncfsyn(G,W1,W2); size(K)
State-space model with 1 outputs, 1 inputs, and 5 states.
ncfsyn проектирует контроллер путем оптимизации ncfmargin поле робастности использование объекта сформировано функциями взвешивания W1 и W2 (см. ncfsyn). Анализировать поля с ncfmargin и уменьшайте порядок контроллера с ncfmr, работайте с имеющим форму объектом Gs и контроллер Ks спроектированный для него.
Gs = Kinfo.Gs; Ks = Kinfo.Ks;
Используйте ncfmargin найти поле робастности системы с контроллером полного порядка. ncfsyn принимает цикл положительной обратной связи в то время как ncfmargin принимает отрицательную обратную связь, так инвертируйте знак контроллера для этого расчета.
emax = ncfmargin(Gs,-Ks)
emax = 0.1956
Пока ошибка приближения контроллера уменьшаемого порядка не превышает emax, устойчивость системы с обратной связью сохраняется. Предположим, что можно терпеть до 50%-го сокращения этого поля в обмен на вычислительное преимущество контроллера более низкоуровневого. Чтобы выбрать уменьшаемый порядок, сначала вычислите ошибки, сопоставленные с каждым целевым порядком. ncfmr возвращает эти значения в ErrorBound поле info аргумент. Затем найдите индекс последней записи в info.ErrorBound это превышает целевую ошибку emax/2.
[~,info] = ncfmr(Ks);
r = find(info.ErrorBound>emax/2,1,'last')r = 3
Таким образом можно аппроксимировать исходный контроллер только по трем состояниям без слишком большой потери устойчивости. Постараться не повторно вычислять сингулярные значения Ганкеля Ks, используйте info как входной параметр к ncfmr.
Ksr = ncfmr(Ks,r,info); size(Ksr)
State-space model with 1 outputs, 1 inputs, and 3 states.
Контроллер уменьшаемого порядка дает к очень похожему запасу устойчивости исходному контроллеру.
ncfmargin(Gs,-Ksr)
ans = 0.1949
Сокращение контроллера заказывает, далее приводит к дополнительному сокращению запаса устойчивости. Сокращение слишком далеко может привести к потере устойчивости с обратной связью. Например, попытайтесь уменьшать до первого порядка.
Ksru = ncfmr(Ks,1,info); ncfmargin(Gs,-Ksru)
ans = 0
Таким образом, для последующего анализа или реализации, используйте контроллер третьего порядка. Для этого преобразуйте Ksr, уменьшаемый контроллер для Gs, в Kr, уменьшаемый контроллер для G.
Kr = W1*Ksr*W2;
Чтобы подтвердить, что этот контроллер является удовлетворительным, сравните ответ с обратной связью на ответ с контроллером полного порядка. Снова, инвертируйте знак контроллера с учетом ncfsyn принятие положительной обратной связи.
CL = feedback(-G*K,1); CLr = feedback(-G*Kr,1); step(CL,CLr) legend

Большое перерегулирование в этом случае происходит из-за нестабильности исходного объекта G.
ncfmr может вычислить несколько моделей уменьшаемого порядка целиком и возвратить их в массиве моделей. Это может быть полезно, например, когда это необходимо, чтобы протестировать проектирование контроллера несколькими приближениями, чтобы выбрать то, которое дает к лучшему балансу между точностью и вычислительным КПД. Чтобы вычислить многоуровневые модели, обеспечьте вектор из целевых порядков сокращения вместо одного значения для order.
Загрузите модель объекта управления с 30 состояниями G. Вычислите пять приближений порядков 11−15.
load("ncfmrModel.mat","G") orders = 11:15; Gred = ncfmr(G,orders); size(Gred)
5x1 array of state-space models. Each model has 2 outputs, 3 inputs, and between 11 and 15 states.
Gred массив пространства состояний уменьшаемого порядка (ss) модели. Можно использовать SamplingGrid свойство ss сопоставлять каждую запись в массиве с его соответствующим порядком модели.
Gred.SamplingGrid = struct('order',orders);Присвоение SamplingGrid может быть полезно для отслеживания записи в массиве моделей. Например, если вы строите частотную характеристику Gred на рисунке MATLAB®, кликая по одному из получившихся ответов создает подсказку, которая включает информацию, чертившую от SamplingGrid.
Можно использовать ncfmr уменьшать объект G или контроллер K при сохранении устойчивости с обратной связью следующей SISO или обратной связи MIMO.
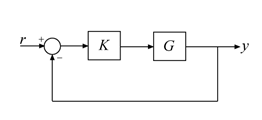
Устойчивость этого цикла сохраняется, пока ошибка приближения уменьшаемого объекта меньше, чем поле робастности для этого цикла, данного ncfmargin(G,K).
Для контроллеров, вычисленных с ncfsyn, сокращение контроллера Ks это ncfsyn вычисляет для имеющего форму контроллера, Gs предпочтителен. И Ks и Gs возвращены ncfsyn в info выходной аргумент. Можно затем вычислить Kr, уменьшаемый контроллер для исходного объекта G, от Kr = W 1KsrW2, где W 1 и W 2 является весами формирования, используемыми с ncfsyn. Для примера смотрите, Уменьшают Порядок Контроллера При Сохранении Устойчивости и Робастности.
Для контроллеров, полученных другими методами, сокращением с ncfmr также устойчивость консервов, если ошибка не превышает ncfmargin поле. Однако такое сокращение может частично удалить интегральное действие и ввести установившиеся ошибки отслеживания. Поэтому удаление любого интегратора называет от диспетчера перед сокращением с ncfmr и заменение их в уменьшаемом контроллере рекомендуется.
ncfmr выполняет следующие шаги, чтобы уменьшать входную модель G до желаемого порядка k.
