Вычислите и выполните UAV автономная миссия
UAV Toolbox / Алгоритмы
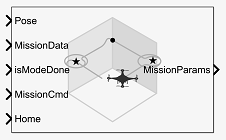
Блок Path Manager вычисляет параметры миссии для беспилотного воздушного транспортного средства (UAV) путем последовательного переключения между точками миссии, заданными во входном порту MissionData. Входной порт MissionCmd изменяет порядок выполнения во времени выполнения. Блок поддерживает и мультиротор и фиксированное крыло типы UAV.
Pose — Текущее положение UAVТекущее положение UAV в виде четырехэлементного вектор-столбца [x;y;z;courseAngle]. x, y и z являются текущим положением UAV на северо-востоке вниз (NED) координаты, заданные в метрах. courseAngle задает угол рыскания в радианах в области значений [-pi, pi].
Типы данных: single | double
MissionData — Данные о миссии UAVUAVPathManagerBus шинаДанные о миссии UAV в виде UAVPathManagerBus шина. UAVPathManagerBus шина имеет три элемента шины mode, position, и params.
Можно использовать блок Constant (Simulink), чтобы задать данные о миссии как n-by-1 массив структур и установить тип выходных данных на Bus:UAVPathManagerBus. n является количеством точек миссии. Поля каждой структуры:
mode — Режим миссии указывает в виде 8-битного беззнакового целого между 1 и 6.
position — Положение миссии указывает в виде трехэлементного вектор-столбца [x;y;z]. x, y и z являются положением на северо-востоке вниз (NED) координаты, заданные в метрах.
params — Параметры миссии указывают в виде четырехэлементного вектор-столбца.
Значения, присвоенные полям, в свою очередь, присвоены своим соответствующим элементам шины в UAVPathManagerBus шина.
Эта таблица описывает типы mode и соответствующие значения для position и params поля в миссии указывают структуру.
mode | position | params | Описание режима |
|---|---|---|---|
uint8(1) | [x;y;z] | [p1;p2;p3;p4] | Takeoff — Взлетите с земли и переместитесь к заданной позиции |
uint8(2) | [x;y;z] |
yaw — Угол рыскания в радианах в области значений radius — Радиус перехода в метрах | Waypoint — Перейдите к waypoint |
uint8(3) |
x, y и z являются центром круговой орбиты в координатах NED, заданных в метрах |
radius — Радиус орбиты в метрах turnDir — Поверните направление в виде одного из них:
numTurns — Количество поворотов | Orbit — Орбита вдоль окружности круга задана параметрами |
uint8(4) | [x;y;z] | [p1;p2;p3;p4] | Land — Приземлитесь в заданном положении |
uint8(5) |
Положение запуска задано в | [p1;p2;p3;p4] | RTL — Возвратитесь, чтобы запустить положение |
uint8(6) | [x;y;z] |
p1, p2, p3 и p4 являются заданными пользователями параметрами, соответствующими пользовательской точке миссии | Custom — Пользовательская точка миссии |
Примечание
p1, p2, p3 и p4 являются заданными пользователями параметрами.
Пример: [struct('mode',uint8(1),'position',[0;0;100],'params',[0;0;0;0])]
Типы данных: bus
IsModeDone — Определите, выполнялась ли точка миссииОпределите, выполнялась ли точка миссии в виде 0 TRUE) или 1 ложь).
Типы данных: Boolean
MissionCmd — Команда, чтобы изменить миссиюuint8(0) (значение по умолчанию) | 8-битное беззнаковое целое между 0 и 3Команда, чтобы изменить миссию во времени выполнения в виде 8-битного беззнакового целого между 0 и 3.
Эта таблица описывает возможные команды миссии.
| Команда миссии | Описание |
|---|---|
uint8(0) | Default — Выполните миссию от сначала до последней точки миссии в последовательности |
uint8(1) | Содержание Содержите в текущей точке миссии Слоняйтесь без дела текущее положение для фиксированного крыла и наведите в текущем положении для БПЛА мультиротора |
uint8(2) | Повторение Повторите миссию после достигания последней точки миссии |
uint8(3) | RTL — Выполните режим возврата, чтобы запуститься (RTL) После RTL миссия возобновляется если |
Типы данных: uint8
Home — Исходное расположение UAVИсходное расположение UAV в виде трехэлементного вектор-столбца [x;y;z]. x, y и z являются положением на северо-востоке вниз (NED) координаты, заданные в метрах.
Типы данных: single | double
MissionParams — Параметры миссии UAVUAVPathManagerBus шинаПараметры миссии UAV, возвращенные как 2 1 массив шин типа UAVPathManagerBus. Первым элементом массива шины A является текущая точка миссии, и вторым элементом массива шины A является предыдущая точка миссии.
Эта таблица описывает выходные параметры миссии в зависимости от режима миссии.
| Текущий режим миссии | Выведите параметры миссии | |||
|---|---|---|---|---|
| Точки миссии | mode | position | params | |
Takeoff | Первый элемент шины: Текущий | uint8(1) | [x;y;z] | [p1;p2;p3;p4] |
Второй элемент шины: Предыдущий |
|
|
| |
Waypoint | Первый элемент шины: Текущий | uint8(2) | [x;y;z] |
yaw — Угол рыскания в радианах в области значений radius — Радиус перехода в метрах |
Второй элемент шины: Предыдущий |
|
|
courseAngle — Угол линейного сегмента между предыдущим и текущим положением, заданным в радианах в области значений | |
Orbit | Первый элемент шины: Текущий | uint8(3) |
x, y и z являются центром круговой орбиты в координатах NED, заданных в метрах |
radius — Радиус орбиты в метрах turnDir — Поверните направление в виде одного из них:
numTurns — Количество поворотов |
Второй элемент шины: Предыдущий |
|
|
| |
Land | Первый элемент шины: Текущий | uint8(4) | [x;y;z] | [p1;p2;p3;p4] |
Второй элемент шины: Предыдущий |
|
|
| |
RTL | Первый элемент шины: Текущий | uint8(5) |
Положение запуска задано в | [p1;p2;p3;p4] |
Второй элемент шины: Предыдущий |
|
|
| |
Custom | Первый элемент шины: Текущий | uint8(6) | [x;y;z] |
p1, p2, p3 и p4 являются заданными пользователями параметрами, соответствующими пользовательской точке миссии |
Второй элемент шины: Предыдущий |
|
|
| |
Примечание
p1, p2, p3 и p4 являются заданными пользователями параметрами.
В начале симуляции предыдущая точка миссии установлена в режим Armed.
| режим | положение | параметрические усилители |
|---|---|---|
uint8(0) |
| [-1;-1;-1;-1] |
Установите точку миссии конца на режим RTL или Land, еще точка миссии конца автоматически установлена в режим Hold.
Эта таблица описывает выходные параметры миссии, когда вход к входному порту MissionCmd установлен в режим Hold.
| Тип UAV | Выведите параметры миссии | |||
|---|---|---|---|---|
| Точки миссии | mode | position | params | |
Multirotor | Первый элемент шины: Текущий | uint8(7) | [x;y;z] | [-1;-1;-1;-1] |
Второй элемент шины: Предыдущий |
|
|
| |
Fixed-Wing | Первый элемент шины: Текущий | uint8(7) |
x, y и z являются центром круговой орбиты в координатах NED, заданных в метрах |
radius — Слоняйтесь радиус задан в turnDir — Повернитесь направление задано как |
Второй элемент шины: Предыдущий |
|
|
| |
Типы данных: bus
UAV type — Тип UAVmultirotor (значение по умолчанию) | fixed-wingТип UAV в виде любого multirotor или fixed-wing.
Настраиваемый: нет
Loiter radius — Слоняйтесь радиус для фиксированного крыла UAVСлоняйтесь радиус для фиксированного крыла UAV в виде положительного числового скаляра в метрах.
Dependencies:, Чтобы включить этот параметр, установите параметр UAV type на fixed-wing.
Настраиваемый: нет
Data type — Тип данных входной шины миссииdouble (значение по умолчанию) | singleТип данных входной миссии соединяет шиной в виде любого double или single.
Настраиваемый: нет
Mission bus name — Имя входной шины миссии'UAVPathManagerBus' (значение по умолчанию)Имя входной миссии соединяет шиной в виде 'UAVPathManagerBus'.
Настраиваемый: нет
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
