Можно использовать аналитические команды, такие как step, bode или margin, чтобы анализировать системы с задержками. Программное обеспечение не делает приближений при выполнении такого анализа.
Например, рассмотрите следующий цикл управления, где объект моделируется как первый порядок плюс потеря времени:
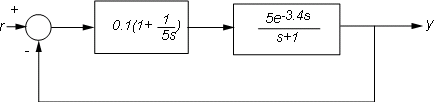
Можно смоделировать систему с обратной связью от r до y со следующими командами:
s = tf('s');
P = 5*exp(-3.4*s)/(s+1);
C = 0.1 * (1 + 1/(5*s));
T = feedback(P*C,1);T является моделью в пространстве состояний с внутренней задержкой. Для получения дополнительной информации о моделях с внутренними задержками, смотрите закрывающуюся Обратную связь с Задержками.
Постройте переходной процесс T:
stepplot(T)

Для более сложных соединений можно назвать сигналы ввода и вывода каждого блока и использовать connect, чтобы автоматически заботиться о проводном соединении. Предположим, например, что вы хотите добавить feedforward в цикл управления предыдущей модели.

Можно вывести соответствующую модель Tff с обратной связью
F = 0.3/(s+4); P.InputName = 'u'; P.OutputName = 'y'; C.InputName = 'e'; C.OutputName = 'uc'; F.InputName = 'r'; F.OutputName = 'uf'; Sum1 = sumblk('e','r','y','+-'); % e = r-y Sum2 = sumblk('u','uf','uc','++'); % u = uf+uc Tff = connect(P,C,F,Sum1,Sum2,'r','y');
и сравните, его ответ с обратной связью только разрабатывают.
stepplot(T,Tff) legend('No feedforward','Feedforward')

Представление пространства состояний отслеживает внутренние задержки обеих моделей.
Время и частотные характеристики систем задержки могут выглядеть нечетными и подозрительными только знакомым с анализом LTI без задержек. Ответы времени могут вести себя хаотично, Диаграммы Боде могут показать колебания усиления и т.д. Это не программное обеспечение или числовые причуды, но действительные функции таких систем. Ниже несколько рисунков этих явлений.
Пульсация усиления:
s = tf('s');
G = exp(-5*s)/(s+1);
T = feedback(G,.5);
bodemag(T)
Колебания усиления:
G = 1 + 0.5 * exp(-3*s); bodemag(G)

Зубчатый переходной процесс:
G = exp(-s) * (0.8*s^2+s+2)/(s^2+s); T = feedback(G,1); stepplot(T)

Отметьте переприбытие (эхо) начальной ступенчатой функции.
Хаотический ответ:
G = 1/(s+1) + exp(-4*s); T = feedback(1,G); stepplot(T,150)

Можно использовать инструменты Control System Toolbox™, чтобы смоделировать и анализировать эти и другие странно появляющиеся артефакты внутренних задержек.
