Этот пример показывает, как настроить компенсатор с помощью автоматизированных настраивающих методов в Control System Designer.
Чтобы выбрать автоматизированный настраивающий метод, в Control System Designer, нажимают Tuning Methods.
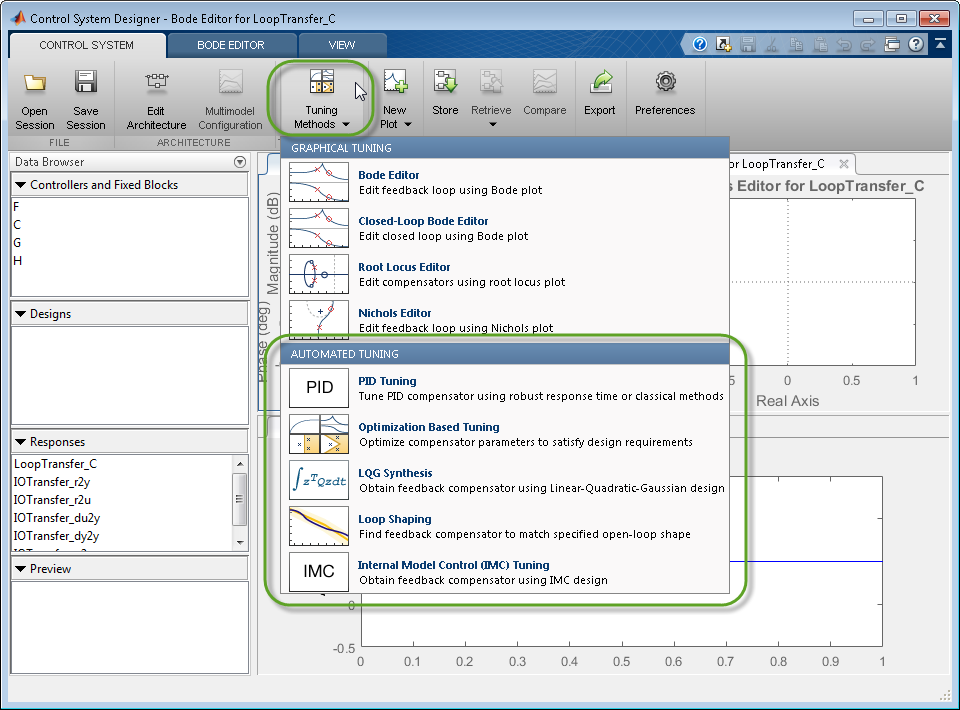
Выберите один из следующих настраивающих методов:
PID Tuning — Настройте коэффициенты ПИД, чтобы сбалансировать производительность и робастность или использовать классические настраивающие формулы.
Optimization Based Tuning — Оптимизируйте параметры компенсатора с помощью конструктивных требований, реализованных в графической настройке, и графики для анализа (требует программного обеспечения Simulink® Design Optimization™).
LQG Synthesis — Разработайте полный порядок, стабилизирующий контроллер обратной связи как средство отслеживания "линейного квадратичного гауссова" (LQG).
Loop Shaping — Найдите полный порядок, стабилизирующий контроллер обратной связи с заданной пропускной способностью разомкнутого цикла, или форма (требует программного обеспечения Robust Control Toolbox™).
Internal Model Control (IMC) Tuning — Получите полный порядок, стабилизирующий контроллер обратной связи, использующий метод разработки IMC.
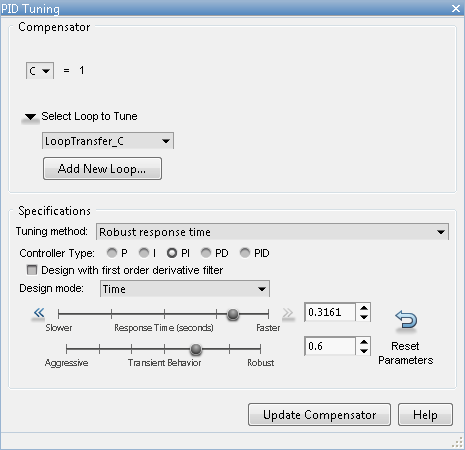
В диалоговом окне для вашего выбранного настраивающего метода, в разделе Compensator, выбирают компенсатор и цикл, чтобы настроиться.

Compensator — Выберите компенсатор, чтобы настроиться из выпадающего списка. Отображения приложения текущая передаточная функция компенсатора.
Select Loop to Tune — Выберите существующую передаточную функцию разомкнутого цикла, чтобы настроиться из выпадающего списка. Можно выбрать любую передаточную функцию разомкнутого цикла из Data Browser, который включает выбранный компенсатор последовательно
Add New Loop — Создайте новый цикл, чтобы настроиться. В диалоговом окне Open-Loop Transfer Function выберите сигналы и открытия цикла, чтобы сконфигурировать передаточную функцию цикла.
Для основанной на оптимизации настройки вы не задаете компенсатор и цикл, чтобы настроиться таким образом. Вместо этого вы задаете структуру компенсатора и выбираете параметры компенсатора и предварительного фильтра, чтобы оптимизировать. Для получения дополнительной информации смотрите, Выбирают Tunable Compensator Elements (Simulink Design Optimization).
Используя Control System Designer, можно автоматически настроить любой из следующих типов ПИД-регулятора:
P Пропорционально-единственное управление
Я — управление Только для интеграла
PI — Пропорционально-интегральное управление
PD — Пропорционально-производное управление
PDF — Пропорционально-производное управление с фильтром нижних частот на производном термине
ПИД — Пропорционально-интегрально-производное управление
PIDF — Пропорционально-интегрально-производное управление с фильтром нижних частот на производном термине
Чтобы открыть диалоговое окно PID Tuning, в Control System Designer, нажимают Tuning Methods и выбирают PID Tuning.
Устойчивый алгоритм времени отклика автоматически настраивает параметры ПИДа, чтобы сбалансировать производительность и робастность. Используя устойчивый метод времени отклика, вы можете:
Настройте все параметры для любого типа ПИД-регулятора.
Разработайте для объектов, которые стабильны, нестабильны, или интеграция.
Настроить ваш компенсатор с помощью этого метода:
В диалоговом окне PID Tuning, в разделе Specifications, в Tuning method выпадающий список, выбирают Robust response time.
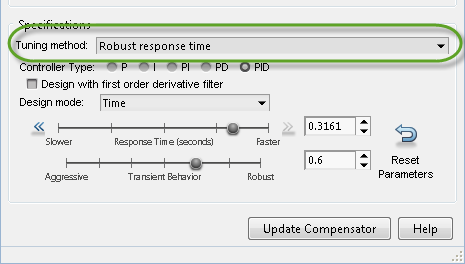
Выберите Controller type. Если вы выбираете PD или PID, проверяйте Design with first order derivative filter, чтобы разработать PDF или контроллер PIDF, соответственно.
Добавление производного действия контроллеру дает алгоритму больше свободы достигнуть и соответствующей фазы граничное и более быстрое время отклика.
В Design mode выпадающий список выберите одно из следующего:
Время Задайте производительность контроллера с помощью параметров временного интервала.
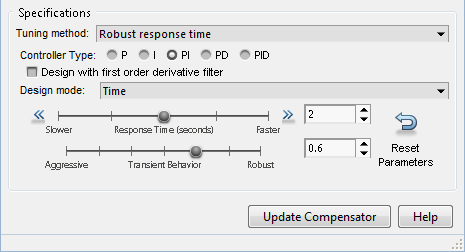
ResponseTime Задайте более быстрое или более медленное время отклика контроллера. Чтобы изменить время отклика фактором десять, используйте левые или правые стрелки.
Transient Behavior — Задайте переходное поведение контроллера. Можно сделать контроллер более агрессивным в подавлении помех или более устойчивым против неуверенности объекта.
Frequency — Задайте производительность контроллера с помощью параметров частотного диапазона.
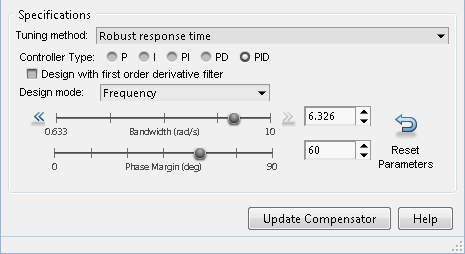
Пропускная способность Задайте пропускную способность с обратной связью системы управления. Чтобы произвести более быстрое время отклика, увеличьте пропускную способность. Чтобы изменить пропускную способность фактором десять, используйте левые или правые стрелки.
Phase Margin — Задайте целевое поле фазы для системы. Чтобы уменьшать перерегулирование и создать более устойчивый контроллер, увеличьте поле фазы.
Чтобы применить заданное проектирование контроллера к выбранному компенсатору, нажмите Update Compensator.
Если вы ранее заданный структура контроллера вручную или использование различного автоматизированного настраивающего метода, та структура потеряна, когда вы нажимаете Update Compensator.
По умолчанию приложение автоматически вычисляет параметры контроллера для сбалансированной производительности и робастности. Чтобы вернуться к этим параметрам по умолчанию в любое время, нажмите Reset Parameters.
Можно использовать классические формулы проекта ПИДа, чтобы настроить P, PI, ПИД и контроллеры PIDF. Эти формулы проекта:
Потребуйте стабильного или объединяющегося объекта. Для получения дополнительной информации об эффективном объекте, замеченном компенсатором, смотрите Эффективный Объект для Настройки.
Не может настроить производный фильтр. Если вы выбираете контроллер PIDF, классические методы разработки устанавливают временную константу фильтра на Td/10, где Td является настроенным производным временем.
Настроить ваш компенсатор с помощью классического метода:
В диалоговом окне PID Tuning, в разделе Specifications, в Tuning method выпадающий список, выбирают Classical design formulas.
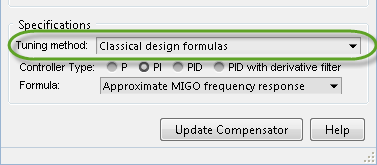
Выберите Controller type.
Добавление производного действия к компенсатору дает алгоритму больше свободы достигнуть и соответствующей фазы граничное и более быстрое время отклика.
В Formula выпадающий список выберите классическую формулу проекта.
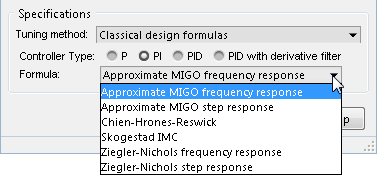
Approximate MIGO frequency response — Вычислите параметры контроллера, использующие с обратной связью, частотный диапазон, аппроксимируйте интегральную оптимизацию усиления M-constrained (см. [1]).
Approximate MIGO step response — Вычислите параметры контроллера с помощью разомкнутого цикла, временного интервала, аппроксимируйте интегральную оптимизацию усиления M-constrained (см. [1]).
Chien-Hrones-Reswick — Аппроксимируйте объект как модель первого порядка с задержкой и вычислите параметры ПИДа с помощью интерполяционной таблицы Цзяня-Хронэс-Жэсвицка для 0%-го перерегулирования и подавления помех (см. [2]).
Skogestad IMC — Аппроксимируйте объект как модель первого порядка с задержкой и вычислите использование параметров ПИДа правила проектирования Skogestad (см. [3]).
Этот метод отличается от выбора Internal Model Control Tuning как настраивающий метод компенсатора полного порядка.
Ziegler-Nichols frequency response — Вычислите параметры контроллера из интерполяционной таблицы Циглера-Николса, на основе окончательного усиления и частоты системы (см. [2]).
Ziegler-Nichols step response — Аппроксимируйте объект как модель первого порядка с задержкой и вычислите параметры ПИДа с помощью метода разработки Циглера-Николса (см. [2]).
Примените заданное проектирование контроллера к выбранному компенсатору. Нажмите Update Compensator.
Если вы ранее заданный структура контроллера вручную или использование различного автоматизированного настраивающего метода, та структура потеряна, когда вы нажимаете Update Compensator.
Основанная на оптимизации настройка доступна, только если вам установили программное обеспечение Simulink Design Optimization. Можно использовать этот метод, чтобы разработать системы управления для моделей LTI путем оптимизации параметров контроллера.
Основанный на оптимизации настраивающийся только изменяет значения параметров контроллера а не самой структуры контроллера. Для получения информации о добавлении или удалении элементов компенсатора, смотрите Динамику Компенсатора Редактирования.
Разработать контроллер, использующий основанную на оптимизации настройку:
Задайте структуру компенсаторов, которые вы хотите настроить. Как правило, вы разрабатываете начальный контроллер или вручную или использование различного автоматизированного настраивающего метода.
Откройте диалоговое окно Response Optimization. В Control System Designer нажмите Tuning Methods и выберите Optimization-Based Tuning.
Выберите параметры компенсатора, чтобы оптимизировать. На вкладке Compensators, в столбце Optimize, выбирают элементы компенсатора, чтобы настроиться.
Можно оптимизировать элементы для любого компенсатора, перечисленного в Data Browser. Чтобы выбрать все элементы для данного компенсатора, установите флажок, который соответствует тому компенсатору.
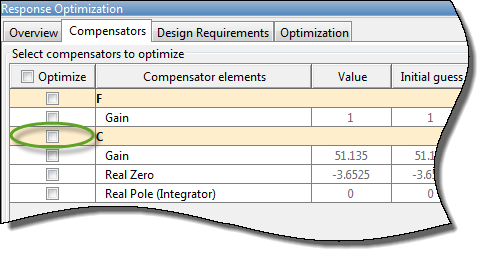
Любые элементы, которые вы не выбираете в столбце Optimize, остаются в их текущих значениях во время оптимизации.
Для каждого элемента компенсатора задайте:
Initial guess — Отправная точка для алгоритма оптимизации. Чтобы использовать текущий элемент Value в качестве Initial guess, кликните по строке в таблице и нажмите Use Value as Initial guess.
Minimum и Maximum ограничивают на значении элемента. Оптимизация ограничивает результаты поиска к заданной области значений.
Масштабный коэффициент Typical value для нормализации элементов компенсатора.
На вкладке Design Requirements, в столбце Optimize, выбирают конструктивные требования, чтобы удовлетворить во время оптимизации.
Каждые конструктивные требования сопоставлены с графиком определенного ответа в Data Browser. Чтобы выбрать все требования для данного ответа, установите соответствующий флажок.
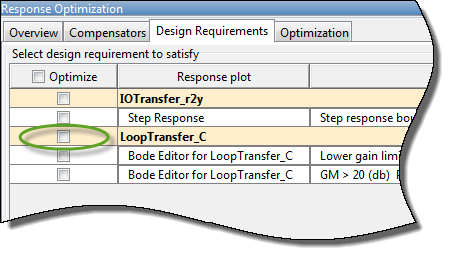
Для получения информации о добавлении и редактировании конструктивных требований, смотрите Конструктивные требования.
(дополнительный) Конфигурируют опции оптимизации. На вкладке Optimization нажмите Optimization options.
Нажмите Start Optimization.
Для примеров основанной на оптимизации настройки смотрите, Оптимизируют Систему LTI, чтобы Удовлетворить Требования Частотного диапазона (Simulink Design Optimization) и Проект Основанный на оптимизации ПИД-регулятор для Линеаризовавшей Модели Simulink (графический интерфейс пользователя) (Simulink Design Optimization).
Управление "линейным квадратичным гауссовым" (LQG) является методом для разработки оптимальных динамических регуляторов и средств отслеживания заданного значения. Этот метод позволяет вам обменивать производительность и усилие по управлению, и учитывать воздействия процесса и шум измерения.
Синтез LQG генерирует контроллер обратной связи полного порядка, который гарантирует устойчивость с обратной связью. Разработанный контроллер содержит интегратор, который гарантирует нулевую установившуюся ошибку для объектов без свободного дифференциатора.
Разработать контроллер LQG:
Откройте диалоговое окно LQG Synthesis. В Control System Designer нажмите Tuning Methods и выберите LQG Synthesis.
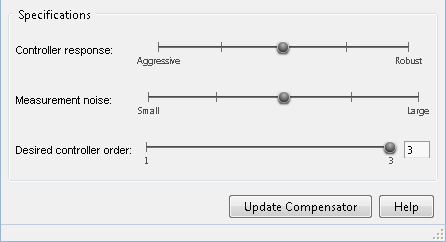
Задайте переходное поведение контроллера, использующего ползунок Controller response. Можно сделать контроллер более агрессивным в подавлении помех или более устойчивым против неуверенности объекта. Если вы полагаете, что ваша модель точна и что переменная, которой управляют, имеет достаточно большую область значений, агрессивный контроллер предпочтителен.
Задайте оценку уровня выходного шума измерения для вашего приложения с помощью ползунка Measurement noise. Чтобы произвести более устойчивый контроллер, задайте большую шумовую оценку.
Задайте свою настройку порядка контроллера с помощью ползунка Desired controller order. Максимальный порядок контроллера зависит от эффективной динамики объекта.
Примените заданное проектирование контроллера к выбранному компенсатору. Нажмите Update Compensator.
Если вы ранее заданный структура контроллера вручную или использование различного автоматизированного настраивающего метода, та структура потеряна, когда вы нажимаете Update Compensator.
Для примера синтеза LQG с помощью Control System Designer см. Проект Средство отслеживания LQG Используя Control System Designer.
Если вам установили программное обеспечение Robust Control Toolbox, можно использовать формирование цикла, чтобы разработать регуляторы SISO в Control System Designer. Формирование цикла генерирует стабилизировавшийся контроллер обратной связи, чтобы совпадать, максимально тесно, с целевой формой цикла. Можно задать эту форму цикла как пропускную способность или частотную характеристику разомкнутого цикла.
Разработать контроллер, использующий формирование цикла:
Откройте диалоговое окно Loop Shaping. В Control System Designer нажмите Tuning Methods и выберите Loop Shaping.
Выберите одну из следующих настраивающих настроек:
Target bandwidth — Задайте Target open-loop bandwidth, , произвести форму цикла заданной пропускной способности по интегратору, .
Target loop shape — Задайте Target open-loop shape как tf, ss или объект zpk. Чтобы ограничить частоты, по которым можно совпадать с целевой формой цикла, задайте Frequency range for loop shaping как двухэлементный вектор - строку.
Задайте свою настройку порядка контроллера с помощью ползунка Desired controller order. Максимальный порядок контроллера зависит от эффективной динамики объекта.
Примените заданное проектирование контроллера к выбранному компенсатору. Нажмите Update Compensator.
Если вы ранее заданный структура контроллера вручную или использование различного автоматизированного настраивающего метода, та структура потеряна, когда вы нажимаете Update Compensator.
Внутреннее образцовое управление (IMC) использует прогнозирующую модель динамики объекта, чтобы вычислить действия управления. Проект IMC генерирует контроллер обратной связи полного порядка, который гарантирует устойчивость с обратной связью, когда не будет никакой образцовой ошибки. Настроенный компенсатор также содержит интегратор, который гарантирует нулевое установившееся смещение для объектов без свободного дифференциатора. Можно использовать этот настраивающий метод и для стабильных и для нестабильных объектов.
Разработать контроллер IMC:
Выберите и сконфигурируйте архитектуру управления IMC. В Control System Designer нажмите Edit Architecture.
В диалоговом окне Edit Architecture выберите пятую архитектуру управления и импортируйте модель объекта управления, G1, прогнозирующую модель, G2 и возмущение Gd.
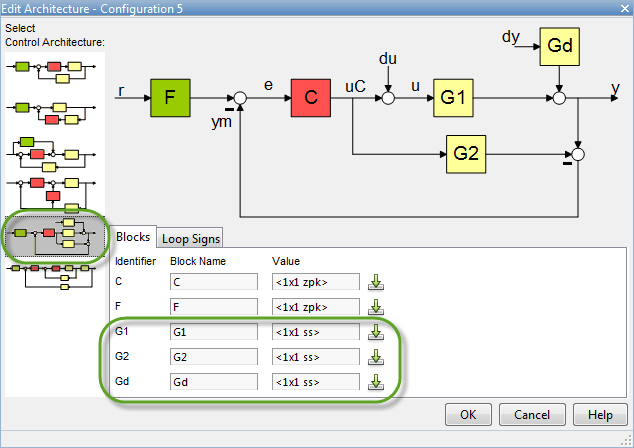
Нажмите OK.
Откройте диалоговое окно Internal Model Control (IMC) Tuning. В Control System Designer нажмите Tuning Methods и выберите Internal Model Control (IMC) Tuning.
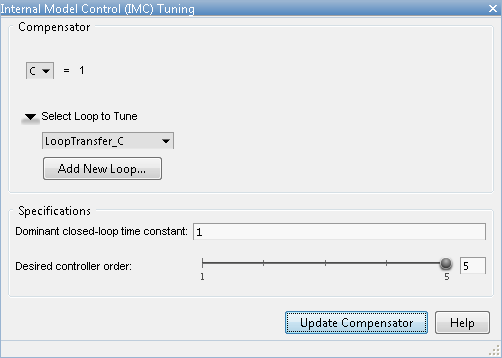
Задайте Доминирующую временную константу с обратной связью. Значение по умолчанию составляет 5% времени установления разомкнутого цикла. В целом увеличение этого значения замедляет систему с обратной связью и делает его более устойчивым.
Задайте свою настройку порядка контроллера с помощью ползунка Desired controller order. Максимальный порядок контроллера зависит от эффективной динамики объекта.
Примените заданное проектирование контроллера к выбранному компенсатору. Нажмите Update Compensator.
Если вы ранее заданный структура контроллера вручную или использование различного автоматизированного настраивающего метода, та структура потеряна, когда вы нажимаете Update Compensator.
Для примера настройки IMC см. Проект Внутренний Образцовый Контроллер для Химического Реакторного Объекта.
[1] Åström, K. J. и Hägglund, T. “Заменяя Циглера-Николса, Настраивающего Правила”. Глава 7 в Усовершенствованном Управлении ПИДом, Ресерч-Трайэнгел-Парке, NC: Инструментирование, Системы и Общество Автоматизации, 2006, стр 233–270.
[2] Åström, K. J. и Hägglund, T. “И Связанные Методы Циглер-Николса”. Разделите 6.2 в Усовершенствованном Управлении ПИДом, Ресерч-Трайэнгел-Парке, NC: Инструментирование, Системы и Общество Автоматизации, 2006, стр 167–176.
[3] Skogestad, S., “Простые аналитические правила для снижения сложности модели и настройки ПИД-регулятора”. Журнал Управления процессом, Издания 13, № 4, 2003, стр 291–309.
