Сглаженный путь к автомобилю с помощью интерполяции кубическим сплайном
Automated Driving Toolbox
![]()
Блок Path Smoother Spline генерирует сглаженный путь к автомобилю, состоя из последовательности дискретизированных положений, путем подбора кривой входным положениям пути к ссылке к кубическому сплайну. Учитывая входные направления контура ссылки, блок также возвращает направления, которые соответствуют каждому положению.
Используйте этот блок, чтобы преобразовать путь C1-continuous к пути C2-continuous. Пути C1-continuous включают пути Dubins или Reeds-Shepp, которые возвращены планировщиками пути. Для получения дополнительной информации на этих типах пути, см. C1-Continuous и Пути C2-Continuous.
Можно использовать возвращенные положения и направления с контроллером автомобиля, такие как Боковой блок диспетчера Стэнли.
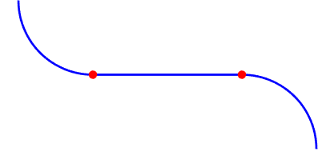
Путь является C1-continuous, если его производная существует и непрерывна. Пути, которые являются только C1-continuous, имеют разрывы в своем искривлении. Например, путь, состоявший из сегментов пути Dubins или Reeds-Sheep, имеет разрывы в искривлении в точках, где сегменты присоединяются. Эти разрывы приводят к изменениям направления, которые не достаточно сглаженны для управления с пассажирами.
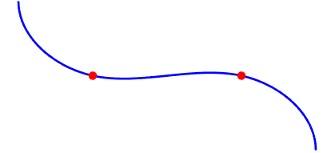
Путем является также C2-continuous, если его вторая производная существует и непрерывна. Пути C2-continuous имеют непрерывное искривление и достаточно сглаженны для управления с пассажирами.
Алгоритм сглаживания пути интерполирует параметрический кубический сплайн, который проходит через все входные точки положения ссылки. Параметр сплайна является совокупной длиной хорды в этих точках. [1]
Направление касательной сглаживавшего вывода path приблизительно совпадает с углом ориентации автомобиля при запуске и целевых положениях.
[1] Плавающий предмет, Майкл С. "На Отклонении Параметрического Кубического Сплайна Interpolant от Его Полигона Данных". Компьютер помог Геометрическому Проекту. Издание 25, Номер 3, 2008, стр 148–156.
[2] Lepetic, Марко, Грегор Клэнкэр, Игорь Скрянк, Драго Матко и Бостджэн Потокник. "Время Оптимальное Планирование пути, Рассматривая Ускоряющие Пределы". Робототехника и Автономные системы. Издание 45, Числа 3-4, 2003, стр 199–210.

