Средний фильтр
Система dsp.MedianFilter object™ вычисляет движущуюся медиану входного сигнала вдоль каждого канала независимо в зависимости от времени. Объект использует метод раздвижного окна, чтобы вычислить движущуюся медиану. В этом методе окно заданной длины отодвинуто каждый канал, выборка выборкой, и объект вычисляет медиану данных в окне. Для получения дополнительной информации см. Алгоритмы.
Вычислить движущуюся медиану входа:
Создайте объект dsp.MedianFilter и установите его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
medFilt = dsp.MedianFiltermedFilt = dsp.MedianFilter(Len)medFilt = dsp.MedianFilter(Name,Value)medFilt = dsp.MedianFiltermedFilt, с помощью свойств по умолчанию.
medFilt = dsp.MedianFilter(Len)WindowLength на Len.
medFilt = dsp.MedianFilter(Name,Value) задает свойство WindowLength с помощью пары Name,Value.
Пример:
movMin = dsp.MedianFilter('WindowLength',5);y = medFilt(x)Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Отфильтруйте высокочастотный шум от шумного синусоидального сигнала с помощью среднего фильтра. Сравните производительность среднего фильтра с фильтром усреднения.
Инициализация
Настройте объект dsp.MedianFilter, medFilt, и объект dsp.MovingAverage, movavgWin. Эти объекты используют метод раздвижного окна с длиной окна 7. Создайте осциллограф времени для просмотра вывода.
Fs = 1000; medFilt = dsp.MedianFilter(7); movavgWin = dsp.MovingAverage(7); scope = dsp.TimeScope('SampleRate',Fs,... 'TimeSpanOverrunAction','Scroll',... 'TimeSpan',1,'ShowGrid',true,... 'YLimits',[-3 3],... 'LayoutDimensions',[3 1],... 'NumInputPorts',3); scope.ActiveDisplay = 1; scope.Title = 'Signal + Noise'; scope.ActiveDisplay = 2; scope.Title = 'Moving Average Output (Window Length = 7)'; scope.ActiveDisplay = 3; scope.Title = 'Median Filter Output (Window Length = 7)'; FrameLength = 256; count = 1; sine = dsp.SineWave('SampleRate',Fs,'Frequency',10,... 'SamplesPerFrame',FrameLength);
Отфильтруйте шумную синусоиду
Сгенерируйте шумный синусоидальный сигнал с частотой 10 Гц. Примените средний фильтр и объект скользящего среднего значения к сигналу. Просмотрите вывод на осциллографе времени.
for i = 1:500 hfn = 3 * (rand(FrameLength,1) < 0.02); x = sine() + 1e-2 * randn(FrameLength,1) + hfn; y1 = movavgWin(x); y2 = medFilt(x); scope(x,y1,y2); end

Средний фильтр удаляет высокочастотный шум эффективнее, чем объект скользящего среднего значения.
Этот пример показывает, как удалить высокочастотные выбросы из сигнала потоковой передачи использование Системного объекта dsp.MedianFilter?.
Используйте Системный объект dsp.MatFileReader, чтобы считать файл MAT гироскопа. Файл MAT гироскопа содержит 3 столбца данных с каждым столбцом, содержащим 7 140 выборок. Эти три столбца представляют Ось X, Ось Y и данные оси Z из датчика движения гироскопа. Выберите формат кадра 714 выборок так, чтобы каждый столбец данных содержал 10 кадров. Системный объект dsp.MedianFilter использует длину окна 10. Создайте объект dsp.TimeScope просмотреть отфильтрованный вывод.
reader = dsp.MatFileReader('SamplesPerFrame',714,'Filename','LSM9DS1gyroData73.mat',... 'VariableName','data'); medFilt = dsp.MedianFilter(10); scope = dsp.TimeScope('NumInputPorts',1,'SampleRate',119,'YLimits',[-300 300],... 'ChannelNames',{'Input','Filtered Output'},'TimeSpan',60,'ShowLegend',true);
Отфильтруйте данные о гироскопе с помощью Системного объекта dsp.MedianFilter. Просмотрите отфильтрованные данные оси Z в осциллографе времени.
for i = 1:10 gyroData = reader(); filteredData = medFilt(gyroData); scope([gyroData(:,3),filteredData(:,3)]); end

Исходные данные содержат несколько выбросов. Увеличьте масштаб данных, чтобы подтвердить, что средний фильтр удаляет все выбросы.
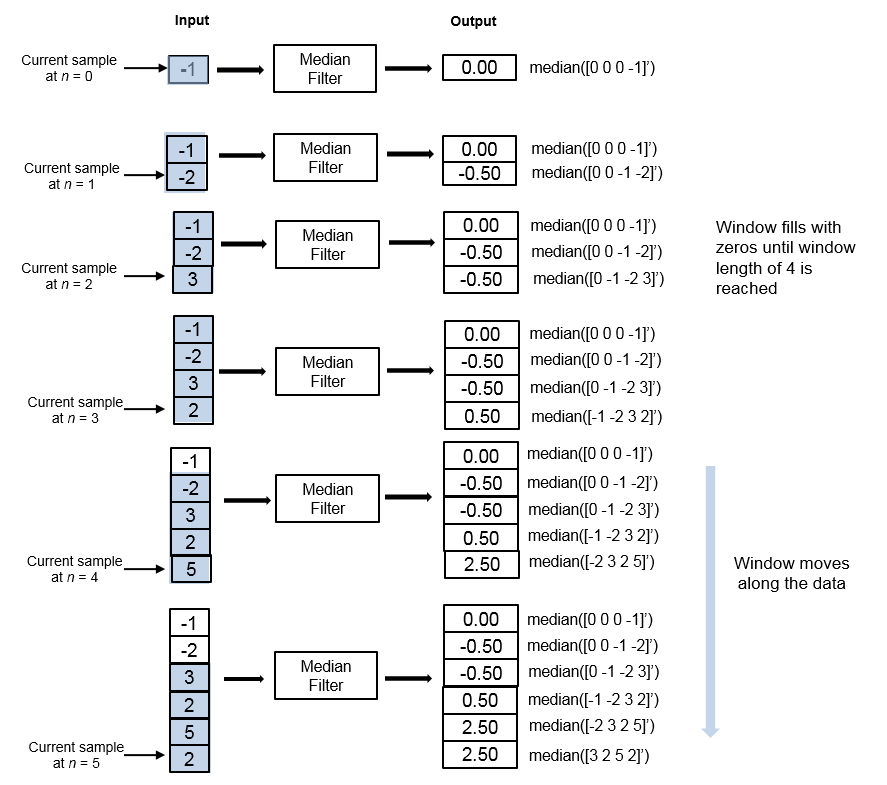
В методе раздвижного окна вывод для каждой входной выборки является медианой текущей выборки и Len - 1 предыдущая выборка. Len является длиной окна. Чтобы вычислить первый Len - 1, выходные параметры, когда окно еще не имеет достаточного количества данных, алгоритм, заполняют окно с нулями. Как пример, чтобы вычислить среднее значение, когда вторая входная выборка входит, алгоритм заполняет окно с Len - 2 нуля. Вектор данных, x, является затем двумя выборками данных, сопровождаемыми Len - 2 нуля. Этот объект выполняет среднюю фильтрацию на входных данных в зависимости от времени.
Рассмотрите пример вычисления движущейся медианы потоковой передачи входные данные с помощью метода раздвижного окна. Алгоритм использует длину окна 4. С каждой входной выборкой, которая входит, окно длины 4 проходит данные.
[1] Боденхэм, декан. “Адаптивное обнаружение фильтрации и изменения для потоковой передачи данных”. PH.D. Тезис. Имперский колледж, Лондон, 2012.
dsp.Median | dsp.MovingAverage | dsp.MovingMaximum | dsp.MovingMinimum | dsp.MovingRMS | dsp.MovingStandardDeviation | dsp.MovingVariance