Дисперсия
V = var(A)V = var(A,w)V = var(A,w,'all')V = var(A,w,dim)V = var(A,w,vecdim)V = var(___,nanflag)V = var( возвращает дисперсию элементов A)A вдоль первого измерения массива, размер которого не равняется 1.
Если A является вектором наблюдений, отклонение является скаляром.
Если A является матрицей, столбцы которой являются случайными переменными и чьи строки являются наблюдениями, V является вектором - строкой, содержащим отклонения, соответствующие каждому столбцу.
Если A является многомерным массивом, то var(A) обрабатывает значения вдоль первого измерения массива, размер которого не равняется 1 как векторы. Размер этой размерности становится 1, в то время как размеры всех других размерностей остаются то же самое.
Отклонение нормировано количеством observations-1 по умолчанию.
Если A является скаляром, var(A) возвращает 0. Если A является 0-by-0 пустой массив, var(A) возвращает NaN.
V = var( задает схему взвешивания. Когда A,w)w = 0 (значение по умолчанию), V нормирован количеством observations-1. Когда w = 1, это нормировано количеством наблюдений. w может также быть вектором веса, содержащим неотрицательные элементы. В этом случае длина w должна равняться длине размерности, по которой действует var.
A Входной массивВходной массив, заданный как векторный, матричный или многомерный массив.
Типы данных: single | double
Поддержка комплексного числа: Да
w Вес0 (значение по умолчанию) | 1 | векторВес, заданный как один из:
0 — нормирует количеством observations-1. Если существует только одно наблюдение, вес равняется 1.
1 — нормирует количеством наблюдений.
вектор составил из неотрицательных скалярных весов, соответствующих размерности A, вдоль которого вычисляется отклонение.
Типы данных: single | double
dim Размерность, которая задает направление расчетаВеличина для работы, заданная как положительный целый скаляр. Если значение не задано, то по умолчанию это первый размер массива, не равный 1.
dim размерности указывает на размерность, длина которой уменьшает до 1. size(V,dim) является 1, в то время как размеры всех других размерностей остаются то же самое.
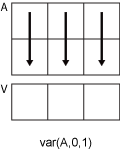
Рассмотрите двумерный входной массив, A.
Если dim = 1, то var(A,0,1) возвращает вектор - строку, содержащий отклонение элементов в каждом столбце.
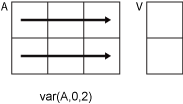
Если dim = 2, то var(A,0,2) возвращает вектор-столбец, содержащий отклонение элементов в каждой строке.
var возвращает массив нулей тот же размер как A, когда dim больше, чем ndims(A).
Типы данных: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
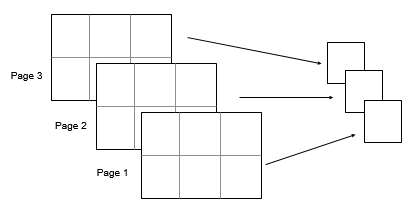
vecdim — Вектор размерностейВектор размерностей, заданных как вектор положительных целых чисел. Каждый элемент представляет размерность входного массива. Продолжительности вывода в заданных операционных размерностях равняются 1, в то время как другие остаются то же самое.
Рассмотрите 2 3х3 входным массивом, A. Затем var(A,0,[1 2]) возвращает 1 1 3 массивами, элементы которых являются отклонениями, вычисленными по каждой странице A.
Типы данных: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
nanflag условие NaN'includenan' (значение по умолчанию) | 'omitnan'Условие NaN, заданное как одно из этих значений:
'includenan' — отклонением входа, содержащего значения NaN, является также NaN.
'omitnan' — все значения NaN, появляющиеся или во входном массиве или в векторе веса, проигнорированы.
Типы данных: char
