Сферические координаты описывают вектор или точку на пробеле с расстоянием и двумя углами. Расстояние, R, является обычной Евклидовой нормой. Существует несколько соглашений относительно спецификации этих двух углов. Они включают:
Азимут и углы повышения
Phi и углы теты
u и координаты v
Программное обеспечение Phased Array System Toolbox™ исходно поддерживает представление азимута/повышения. Программное обеспечение также обеспечивает функции для преобразования между представлением азимута/повышения и другими представлениями. См. Углы Phi и Теты и U и V Координат.
В программном обеспечении Phased Array System Toolbox преобладающее соглашение для сферических координат следующие:
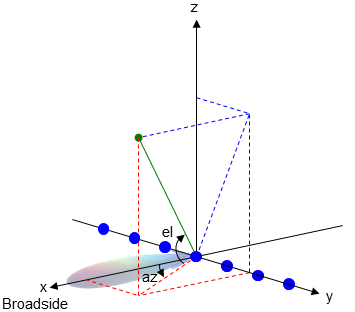
Используйте угол азимута, az, и угол повышения, el, чтобы задать местоположение точки на сфере единичного радиуса.
Задайте все углы в градусах.
Перечислите координаты в последовательности (az, el, R).
azimuth angle вектора является углом между x - ось и ортогональной проекцией вектора на плоскость xy. Угол положителен в движении от оси x к оси y. Углы азимута находятся между –180 и 180 градусами. elevation angle является углом между вектором и его ортогональной проекцией на xy - плоскость. Угол положителен при движении к положительному z - ось от плоскости xy. Эти определения принимают, что направлением опорного направления является положительный x - ось.
Угол повышения иногда задается в литературе как угол, который вектор делает с положительным z - ось. MATLAB® и продукты Phased Array System Toolbox не используют это определение.
Эта фигура иллюстрирует угол азимута и угол повышения для вектора, который появляется как зеленая сплошная линия. Система координат относительно центра универсальной линейной матрицы, элементы которой появляются как синие круги.
Как альтернатива азимуту и углам повышения, можно использовать углы, обозначенные φ и θ, чтобы выразить местоположение точки на сфере единичного радиуса. Чтобы преобразовать φ/θ представление и от соответствующего представления азимута/повышения, используйте координатные функции преобразования, phitheta2azel и azel2phitheta.
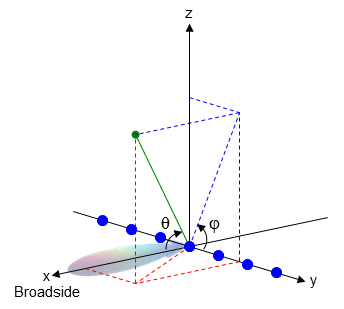
φ угол является углом от положительного y - оси к положительному z - ось к ортогональной проекции вектора на плоскость yz. φ угол между 0 и 360 градусами. θ угол является углом от x - ось к плоскости yz к самому вектору. θ угол между 0 и 180 градусами.
Фигура иллюстрирует φ и θ для вектора, который появляется как зеленая сплошная линия. Система координат относительно центра универсальной линейной матрицы, элементы которой появляются как синие круги.
Координатные преобразования между φ/θ и az/el описаны следующими уравнениями
В радарных приложениях часто полезно параметризовать полушарие x ≥ 0 координат использования, обозначенных u и v.
Чтобы преобразовать φ/θ представление и от соответствующего u/v представление, используйте координатные функции преобразования phitheta2uv и uv2phitheta.
Чтобы преобразовать представление азимута/повышения и от соответствующего u/v представление, используйте координатные функции преобразования azel2uv и uv2azel.
Можно задать u и v с точки зрения φ и θ:
В этих выражениях φ и θ являются phi и углами теты, соответственно.
С точки зрения азимута и повышения, u и координаты v
Значения u и v удовлетворяют неравенства
С другой стороны phi и углы теты могут быть записаны с точки зрения использования v и u
Азимут и углы повышения могут также быть записаны с точки зрения u и v
Следующие уравнения задают отношения между прямоугольными координатами и (az, el, R) представление, используемое в программном обеспечении Phased Array System Toolbox.
Преобразовывать прямоугольные координаты в (az, el, R):
Преобразовывать (az, el, R) к прямоугольным координатам:
При определении местоположения цели относительно поэтапного массива распространено относиться к своему расстоянию и направлению от массива. Расстояние от массива соответствует R в сферических координатах. Направление соответствует углы повышения и азимут.
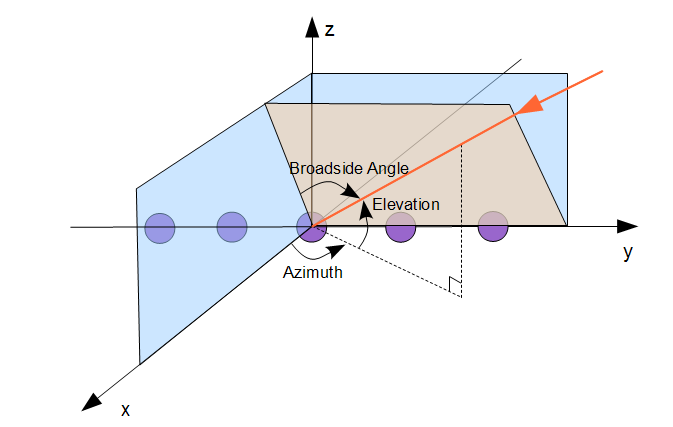
Broadside angles полезен при описании ответа универсальной линейной матрицы (ULA). Ответ массивов зависит непосредственно от поперечного угла а не от углов повышения и азимута. Запустите с ULA и чертите плоскость, ортогональную к оси ULA как показано синего цвета в фигуре. Поперечный угол является углом между плоскостью и направлением сигнала. Чтобы вычислить поперечный угол, создайте строку из любой точки на пути прохождения сигнала к плоскости, ортогональной к плоскости. Угол между этими двумя строками является поперечным углом и находится в интервале [–90°,90°]. Поперечный угол положителен, когда измерено к положительному направлению оси массивов. Нулевые степени указывают на путь прохождения сигнала, ортогональный к оси массивов. ±90 ° указывают на пути вдоль оси массивов. Все пути прохождения сигнала, имеющие тот же поперечный угол, формируют конус вокруг оси ULA.
Преобразование из угла азимута, az, и угла повышения, el к поперечному углу, β,
Это уравнение показывает это
Для угла повышения нуля поперечный угол равняется углу азимута.
Углы повышения одинаково выше и ниже результата плоскости xy в идентичных поперечных углах.
Можно преобразовать от поперечного угла до угла азимута, но необходимо задать угол повышения
Поскольку пути к сигналам для данного поперечного угла, β, формируют конус вокруг оси массивов, вы не можете задать угол повышения произвольно. Угол повышения и поперечный угол должны удовлетворить
Следующая фигура изображает ULA с распределенными метрами d элементов независимо. ULA освещается плоской волной, испускаемой из точечного источника в далеком поле. Для удобства угол повышения является нулевыми степенями. В этом случае направление сигнала находится в xy - плоскость. Затем поперечный угол уменьшает до угла азимута.
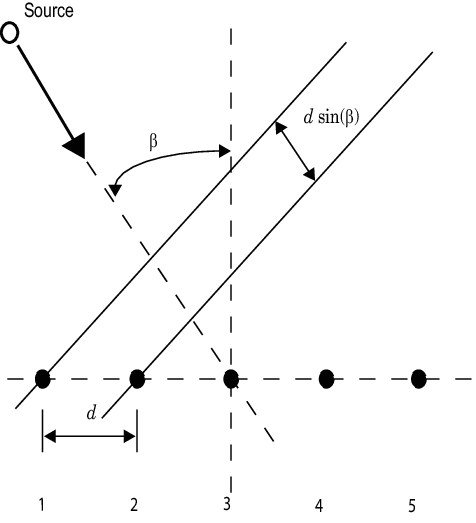
Из-за угла прибытия элементы массива одновременно не освещаются плоской волной. Дополнительное расстояние инцидентными перемещениями волны между элементами массива является d sinβ, где d является расстоянием между элементами массива. Постоянная задержка, τ, между элементами массива
где c является скоростью волны.
Для поперечных углов ±90 ° сигнал является инцидентом на массиве, параллельном оси массивов, и задержка между датчиками равняется ±d/c. Для поперечного угла нуля плоская волна освещает все элементы ULA одновременно, и задержка между элементами является нулем.
Программное обеспечение Phased Array System Toolbox предоставляет функциям az2broadside и broadside2az для преобразования между поперечными углами и азимутом.
Следующие примеры показывают, как использовать функции broadside2az и az2broadside.
Цель расположена под углом азимута 45 ° и под углом повышения 60 ° относительно ULA. Определите соответствующий поперечный угол.
bsang = az2broadside(45,60)
bsang = 20.7048
Вычислите азимут для инцидентного сигнала, прибывающего в поперечный угол 45 ° и повышение 20 °.
az = broadside2az(45,20)
az = 48.8063
