Этот пример показывает, как смоделировать изотермический гидравлический привод с помощью блоков Simscape™ Fluids™. Привод включает насос, клапан и цилиндр. Насос обеспечивает производство электроэнергии, регулирование потока клапана и цилиндрическое преобразование электроэнергии в механическую переводную форму. Смешанная система массового пружинного демпфера предоставляет простую модель загрузки привода.
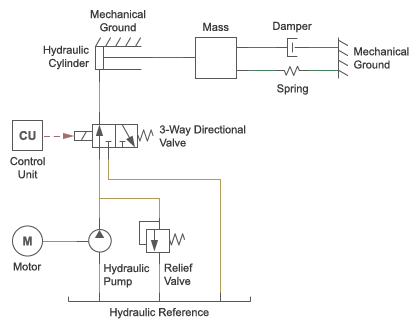
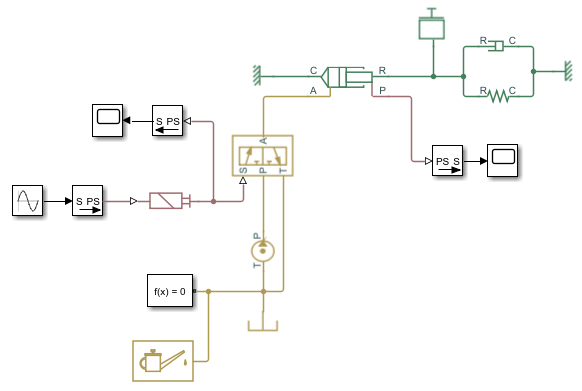
Данные показывают схематическую из полной системы привода. Модель делает некоторые предположения упрощения. Идеальный источник давления заменяет насос в качестве источника питания. Простые входные параметры физического сигнала заменяют моторный компонент и алгоритм блока управления. Предохранительный клапан является ненужной деталью в этом примере и проигнорирован.
Гидравлический схематичный привод
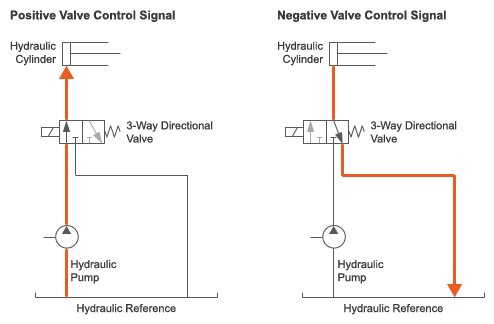
Распределительный клапан с 3 путями обеспечивает три порта и два положения управления. Порты представляют цилиндр, насос и гидравлические ссылочные входные отверстия. Положение управления меняется в зависимости от входа привода клапана. Выше 50% значения сигналов номинала привода клапана клапан открывает путь к потоку цилиндра насоса. Цилиндрический вал расширяет против загрузки привода. Ниже 50% значения сигналов номинала привода клапана клапан открывает путь к потоку цилиндрического водохранилища. Цилиндрический вал отрекается при действии загрузки привода.
Положения распределительного клапана
В командной строке MATLAB® введите ssc_new. MATLAB открывает шаблон модели Simscape. Этот шаблон обеспечивает отправную точку для вашей модели Simscape Fluids. Сохраняйте модель часто, когда вы добавляете новые блоки.
От библиотеки Hydraulics (Isothermal)> Hydraulic Utilities перетащите блок Hydraulic Fluid к образцовому холсту. Этот блок задает физические свойства гидравлической жидкости, включая ее плотность, вязкость и объемный модуль.
Соедините Настройку Решателя и Гидравлические Жидкие блоки как показано в фигуре. Блок Configuration Решателя обеспечивает настройки решателя Simscape для вашей модели. Каждая топологически отличная физическая сеть требует одного такого блока.

От библиотеки Simscape> Foundation перетащите эти блоки к образцовому холсту.
| Блок | Подбиблиотека |
|---|---|
| Гидравлический источник постоянного давления | Hydraulic> Hydraulic Sources |
| Гидравлическая ссылка | Hydraulic> Hydraulic Elements |
Источник давления представляет насос. Гидравлическая ссылка представляет водохранилище, от которого насос чертит жидкость.
От библиотеки Simscape> Fluids перетащите эти блоки к образцовому холсту.
| Блок | Подбиблиотека |
|---|---|
| Гидравлический цилиндр одностороннего действия | Hydraulics (Isothermal)> Hydraulic Cylinders |
| Распределительный клапан с 3 путями | Hydraulics (Isothermal)> Valves |
| 2-позиционный привод клапана | Hydraulics (Isothermal)> Valves |
Гидравлический цилиндр преобразовывает гидравлическую энергию, произведенную источником давления в механическую переводную форму. Распределительный клапан и привод клапана регулируют поток к цилиндру. Таким образом, они управляют механической энергией, произведенной в цилиндре.
Соедините блоки как показано в фигуре. Распределительный клапан С 3 путями и Гидравлические Исходные блоки Постоянного давления должны оба соединиться с блоком Hydraulic Reference.
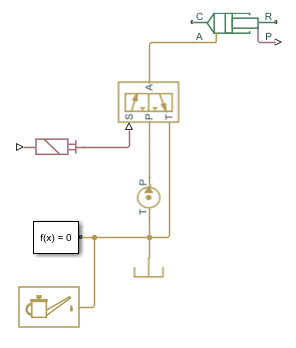
Связи блока зеркально отражают физические соединения между фактическими компонентами. Цилиндр соединяется с клапаном, который соединяется с насосом, который в свою очередь соединяется с жидким водохранилищем.
В диалоговом окне блока Directional Valve С 3 путями кликните по вкладке Valve Opening Offsets и установите параметр Between A-T на 0.01 m.
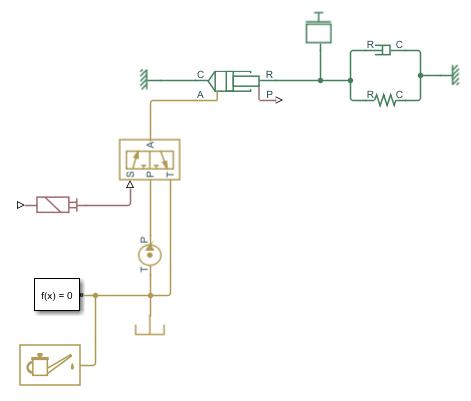
От библиотеки Simscape> Foundation> Mechanical> Translational добавьте блок Mechanical Translational Reference и соедините ее как показано в фигуре.

Строка связи фиксирует гидравлическое цилиндрическое преобразование регистра, представленное портом c, к механической земле так, чтобы только вал, представленный портом R, был способен к движению.
От библиотеки Simscape> Foundation> Mechanical> Translational Elements перетащите эти блоки к образцовому холсту:
Соедините блоки как показано в фигуре.
Масса, элементы пружины и демпфера предоставляют простую модель загрузки привода. Масса составляет кинетическое аккумулирование энергии, пружина для устройства хранения данных потенциальной энергии и демпфер для вязкого энергетического рассеяния из-за движения.
От библиотеки Simulink® Sources перетащите Синусоиду и два блока Осциллографа.
От библиотеки Simscape Utilities перетащите один Конвертер PS Simulink и два блока Конвертера Simulink PS.
Соедините Синусоиду, Конвертер PS Simulink и 2-позиционные блоки Привода клапана последовательно как показано в фигуре.

Блок Sine Wave предоставляет синусоидальный вход управления 2-позиционному блоку Valve Actuator. Блок Simulink-PS Converter преобразовывает синусоидальный вход от Сигнала Simulink в физический сигнал, совместимый с блоками Simscape Multibody™.
В диалоговом окне блока Sine Wave, установленном параметр Amplitude на 24. Это значение соответствует номинальному значению сигналов по умолчанию 2-позиционного блока Valve Actuator.
Соедините Гидравлический Блок двигателя Одностороннего действия, блок PS-Simulink Converter и блок Scope последовательно как показано в фигуре.

Порт P Гидравлического Блока двигателя Одностороннего действия выводит физический сигнал с измеренным цилиндрическим положением вала. Блок PS-Simulink Converter преобразовывает физический сигнал в Сигнал Simulink для графического вывода с блоком Simulink Scope.
Соедините выходную сторону 2-позиционного блока Valve Actuator, блока PS-Simulink Converter и блока Scope последовательно как показано в фигуре.
Выходная сторона 2-позиционного блока Valve Actuator выводит физический сигнал с измеренным открытием клапана. Блок PS-Simulink Converter преобразовывает физический сигнал в Сигнал Simulink для графического вывода с блоком Simulink Scope.
Запустите симуляцию. Можно сделать это из панели меню Simulink путем нажатия![]() кнопки. Программное обеспечение Simscape оценивает модель, определяет начальные условия и моделирует модель. Для получения дополнительной информации смотрите Как Моделирование Simscape (Simscape).
кнопки. Программное обеспечение Simscape оценивает модель, определяет начальные условия и моделирует модель. Для получения дополнительной информации смотрите Как Моделирование Simscape (Simscape).
Откройте блоки Scope.
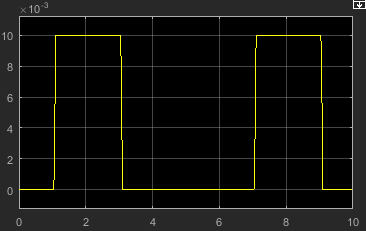
График открытия клапана показывает динамический ответ клапана к синусоидальному входному сигналу волны.
Цилиндрический график положения показывает динамический ответ цилиндрического вала к изменениям давления в цилиндрической камере.
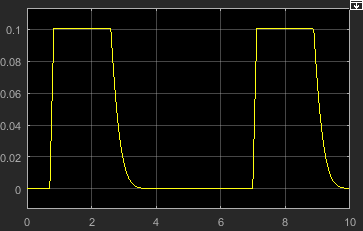
Клапан первоначально закрывается. Когда управляющий сигнал клапана достигает 50% сигнала номинала привода, клапан постепенно открывается, чтобы позволить поток между насосом и цилиндром. Цилиндрический вал перемещается в положительное направление, пока это не достигает максимального положения, позволенного ходом поршня.
Когда сигнал клапана понижается 50% сигнала номинала привода, клапан постепенно закрывается, чтобы предотвратить, вытекают из насоса к цилиндру. Пружинный элемент в загрузке привода выражает несогласие с цилиндрическим валом, обеспечивая его, чтобы возвратиться к его положению, от которого отрекаются.
Экспериментируйте с различными входными параметрами клапана и значениями параметров блоков. Моделируйте модель при различных условиях видеть эффект различных входных параметров и параметров на клапане вводная динамика и цилиндрическое смещение вала.
