Планетарная зубчатая передача со ступенчатым механизмом планеты установлена
Simscape / Автомобильная трансмиссия / Механизмы

Этот блок представляет планетарную зубчатую передачу с составными механизмами планеты. Каждый составной механизм планеты является парой твердо подключенных и в длину расположенных механизмов различных радиусов. Один из этих двух механизмов затрагивает расположенный в центре механизм солнца, в то время как другой затрагивает внешний кольцевой механизм.
Соедините планетарный механизм
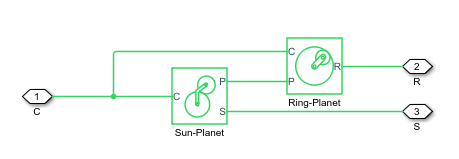
Блок моделирует составной планетарный механизм как структурное компонентно-ориентированное на блоках Simscape™ Driveline™ Планеты Sun и Кольцевой Планеты. Данные показывают блок-схему этого структурного компонента.
Чтобы увеличить точность модели механизма, можно задать свойства, такие как инерция механизма, запутывающие потери и вязкие потери. По умолчанию инерция механизма и вязкие потери приняты незначительные. Блок позволяет вам задать инерцию внутренних механизмов планеты только. Чтобы смоделировать инерцию поставщика услуг, солнце и кольцевые механизмы, соединяют блоки Инерции Simscape с портами C, S, и R.
Можно смоделировать эффекты теплового потока и изменения температуры через дополнительный тепловой порт сохранения. По умолчанию тепловой порт скрыт. Чтобы представить тепловой порт, щелкните правой кнопкой по блоку по своей модели и, из контекстного меню, выберите Simscape> Block choices. Выберите вариант, который включает тепловой порт. Задайте связанные тепловые параметры для компонента.
Составной Планетарный Механизм налагает два кинематических и два геометрических ограничения на три связанных оси и четвертое, внутреннее колесо (планета):
r CωC = r SωS + r P1ωP, r C = r S + r P1,
r RωR = r CωC + r P2ωP, r R = r C + r P2.
Передаточное отношение кольцевой планеты RP g = r R/rP2 = N R/NP2 и передаточное отношение солнца планеты PS g = r P1/rS = N P1/NS. N является количеством зубов на каждом механизме. С точки зрения этих отношений ключевое кинематическое ограничение:
(1 + RP g · PS g) ω C = ω S + RP g · g PSωR.
Эти четыре степени свободы уменьшают до двух независимых степеней свободы. Пары механизма (1,2) = (P2, R) и (S, P1).
Передаточное отношение RP g должно быть строго больше, чем один.
Передачи крутящего момента:
g RPτP2 + τ R – потеря τ (P2, R) = 0, g PSτS + τ P1 – потеря τ (S, P1) = 0,
с потерей τ = 0 в идеальном случае.
В неидеальном случае, . Смотрите образцовые механизмы с потерями.
Механизмы приняты твердые.
Кулоново трение замедляет симуляцию. Смотрите Настраивают Точность Модели.
| Порт | Описание |
|---|---|
| C | Вращательный порт сохранения, представляющий поставщика услуг механизма планеты |
| R | Вращательный порт сохранения, представляющий кольцевой механизм |
| S | Вращательный порт сохранения, представляющий механизм солнца |
| H | Тепловой порт сохранения для теплового моделирования |
Фиксированное отношение RP g звонка связывает с механизмом планеты. Передаточное отношение должно быть строго больше, чем 1. Значением по умолчанию является 2.
Фиксированное отношение PS g планеты связывает с механизмом солнца. Передаточное отношение должно быть строго положительным. Значением по умолчанию является 1.
Параметры для того, чтобы поймать в сети потери меняются в зависимости от выбранного варианта блока — один с тепловым портом для теплового моделирования и один без него.
Вектор вязких коэффициентов трения [μ S
μ P] для движений механизма поставщика услуг солнца и поставщика услуг планеты, соответственно. Значением по умолчанию является [0 0].
Из выпадающего списка выберите модули. Значением по умолчанию являются ньютон-метры / (радианы/секунда) (N*m/(rad/s)).
Момент инерции объединенных механизмов планеты. Это значение должно быть положительным или нуль. Введите 0, чтобы проигнорировать инерцию механизма. Значением по умолчанию является 0 kg*m^2.
Тепловая энергия, требуемая изменить температуру компонента одной степенью. Чем больше количество тепла, тем более стойкий компонент к изменению температуры. Значением по умолчанию является 50 J/K.
Температура компонента в начале симуляции. Начальная температура изменяет эффективность компонента согласно вектору эффективности, который вы задаете, влияя на запутывающий запуск или потери трения. Значением по умолчанию является 300 K.
Для оптимальной производительности симуляции используйте Meshing Losses> настройка по умолчанию параметра Friction model, No meshing losses - Suitable for HIL simulation.
