Этот пример показывает, как управлять входом дросселя к модели автомобиля Simscape™ Driveline™ использование Powertrain Blockset™ Продольный Блок драйверов. Вы добавляете драйвер в модель разомкнутого цикла, которая использует блок Signal Builder для управления feedforward. Добавление драйвера позволяет вам моделировать управление с обратной связью путем предоставления ссылочной скорости и обратной связи.
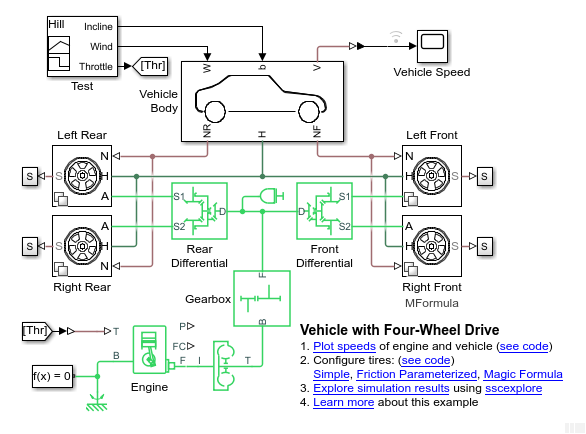
В симуляции разомкнутого цикла блок Signal Builder Simulink® используется к подъему дроссель. Моделируйте модель, чтобы видеть ответ разомкнутого цикла.
Откройте модель. В командной строке MATLAB® введите этот код.
Включите сигнал, который переходит к блоку scope Motor RPM для регистрации данных Simulink и просматривающий с Инспектором Данных моделирования.
Значок журналирования![]() отмечает сигнал в модели.
отмечает сигнал в модели.
Увеличьте время симуляции, чтобы получить установившиеся результаты. Моделируйте модель.
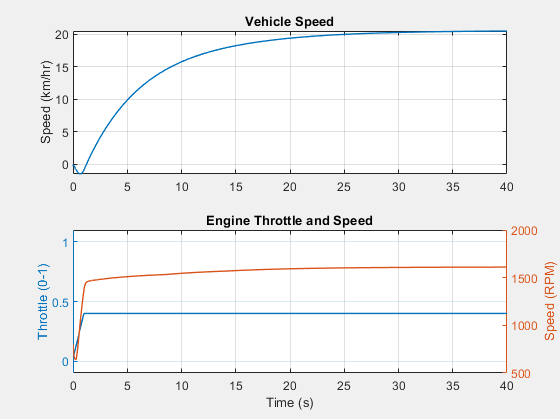
Даже при том, что вход дросселя является ненулевым во времени симуляции 0, автомобиль катится вниз по склону сначала, потому что вход является слишком маленьким, чтобы преодолеть гравитационную силу наклонной поверхности. Когда вход является достаточно большим, автомобиль ускоряет выступ и обосновывается в скорости ~20 км/ч.
Чтобы управлять входом дросселя, добавьте Powertrain Blockset Продольный Блок драйверов.
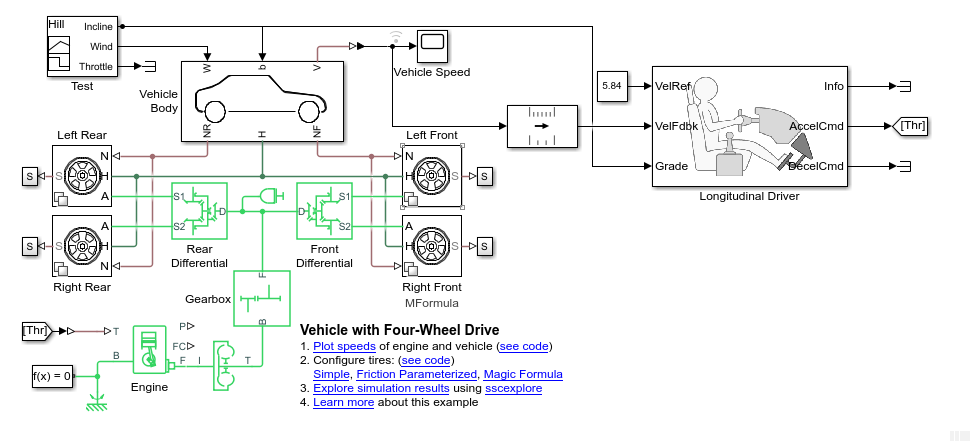
Добавьте Продольный Блок драйверов в модель.
Расширьте окно модели, чтобы соответствовать Продольному Блоку драйверов.
Добавьте Продольный Блок драйверов.
Измените источник входа дросселя от порта Throttle блока Signal Builder до Продольного порта AccelCmd Блока драйверов и отключите несвязанный порт Throttle с блоком Terminator.
Отключите Info и выходные порты DeclCmd на Продольном Блоке драйверов
Введите скорость ссылки 5.84 к Продольному порту VelRef Блока драйверов с помощью блока Constant.
Введите угловой сигнал наклонной поверхности от блока Signal Builder до Продольного Блока драйверов путем соединения выходного порта Incline с импортом Grade.
Введите скоростной сигнал обратной связи к Продольному Блоку драйверов с помощью блока Unit Conversion, чтобы преобразовать от км/час до m/s.
Моделируйте модель с обратной связью с помощью Простых блоков Шины и постройте результаты.
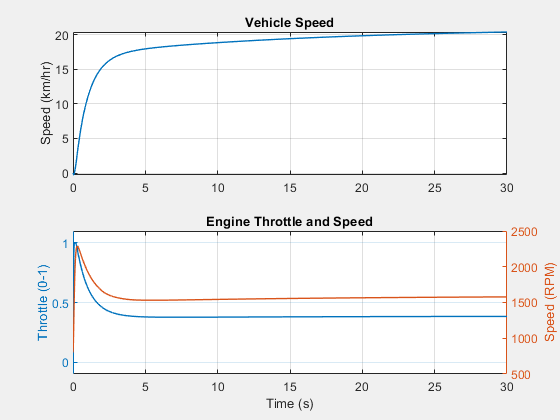
Блок диска увеличивает вход дросселя быстро в начале симуляции из-за различия между скоростной обратной связью и ссылочными сигналами.
Сравните открытые и результаты с обратной связью с помощью Инспектора Данных моделирования.
Чтобы видеть результаты в Инспекторе Данных моделирования, кликните по значку Compare и затем, под Filter Comparisons, нажмите PS-Simulink Converter1:1.
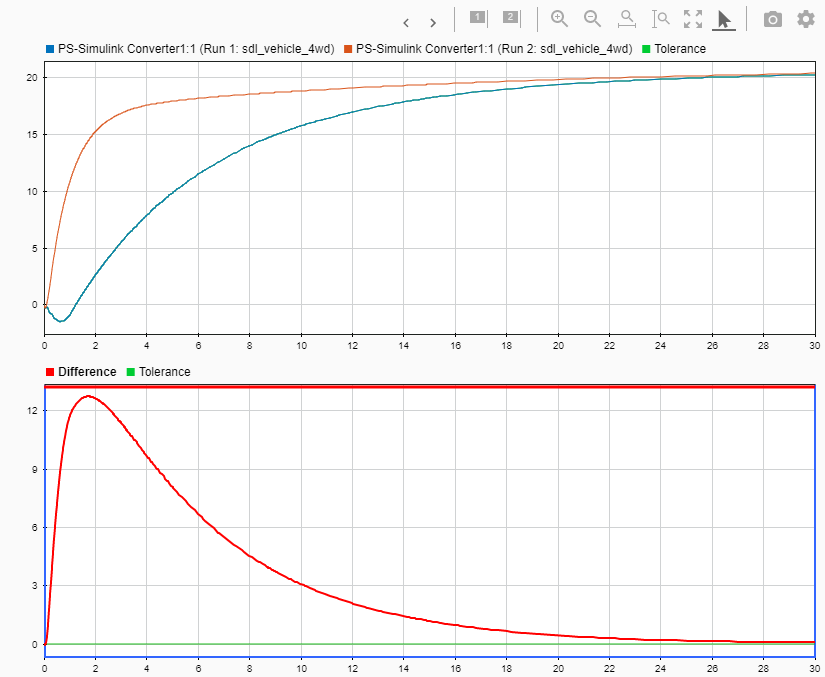
Первый график накладывает результаты открытых и симуляций с обратной связью. Это показывает, насколько быстрее управляемый автомобиль переходит к устойчивому состоянию.
Второй график показывает числовое различие в результатах этих двух симуляций. Это показывает, насколько два сигнала отличаются в начале симуляции и как они в конечном счете достигают того же устойчивого состояния.
Можно также исследовать результаты на другие блоки шины.
Постоянный | Терминатор | Шина (параметризованное трение) | Шина (волшебная формула) | (Простая) шина | Модульное преобразование
