Дискретное время или непрерывно-разовый фильтр нижних частот
Simscape / Электрический / Управление / Общее Управление
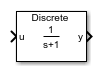
Фильтр нижних частот (Дискретный или Непрерывный) блок реализует фильтр нижних частот в соответствии с IEEE 421.5-2016 [1]. В стандарте фильтр упоминается как Простая Временная константа.
Можно переключиться между непрерывными и дискретными реализациями интегратора с помощью параметра Sample time.
Чтобы сконфигурировать фильтр в течение непрерывного времени, установите свойство Sample time на 0. Это представление эквивалентно непрерывной передаточной функции:
где:
K является усилением фильтра.
T является временной константой фильтра.
От предыдущей передаточной функции уравнения определяющего фильтра:
где:
u является входом фильтра.
x является состоянием фильтра.
y является фильтром вывод.
t является временем симуляции.
u0 является начальным входом к блоку.
Чтобы сконфигурировать фильтр в течение дискретного времени, установите свойство Sample time на положительное, ненулевое значение, или на -1 наследовать шаг расчета от восходящего блока. Дискретное представление эквивалентно передаточной функции:
где:
K является усилением фильтра.
T является временной константой фильтра.
Ts является шагом расчета фильтра.
От дискретной передаточной функции уравнения фильтра определены с помощью прямого Метода Эйлера:
где:
u является входом фильтра.
x является состоянием фильтра.
y является фильтром вывод.
n является шагом времени симуляции.
u0 является начальным входом к блоку.
Блок устанавливает состояние и выходные начальные условия пропорционально к начальному входу.
Установите Upper saturation limit и параметры Lower saturation limit использовать антизаключительный метод насыщения.
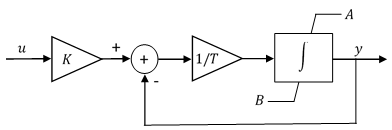
Антизаключительный метод ограничивает состояние интегратора между более низким пределом насыщения, A и верхнее насыщение ограничивают B:
Поскольку состояние ограничивается, вывод может сразу ответить на реверсирование входного знака, когда интеграл насыщается. Эта блок-схема изображает реализацию антизаключительного метода насыщения в фильтре.
Этот блок не предоставляет заключительный метод насыщения. Чтобы использовать заключительный метод насыщения, установите параметр Upper saturation limit на inf, параметр Lower saturation limit к -inf, и присоедините блок насыщения к выводу.
Установите временную константу на значение, меньшее, чем или равный шагу расчета игнорировать динамику фильтра. Когда обойдено, блок кормит масштабируемым усилением входом непосредственно вывод:
В непрерывном случае шаг расчета и временная константа должны оба быть нулем.
[1] Методические рекомендации IEEE для системных моделей возбуждения для исследований устойчивости энергосистемы. Станд. IEEE 421.5-2016. Пискатауэй, NJ: IEEE-SA, 2016.



