Дискретное время или непрерывно-разовый интегратор с перенесенным состоянием
Simscape / Электрический / Управление / Общее Управление
Интегратор с Перенесенным состоянием (Дискретный или Непрерывный) блок реализует перенесенный интегратор состояния в соответствии с IEEE 421.5-2016 [1].
Используйте этот блок, чтобы сгенерировать периодические сигналы, такие как углы или представлять управляемый напряжением осциллятор. Можно переключиться между непрерывными и дискретными реализациями интегратора с помощью параметра Sample time.
Чтобы сконфигурировать интегратор в течение непрерывного времени, установите свойство Sample time на 0. Это представление эквивалентно непрерывной передаточной функции:
От предыдущей передаточной функции уравнения определяющего интегратора:
где:
u является входом интегратора.
x является состоянием интегратора.
y является интегратором вывод.
t является временем симуляции.
x0 является начальным состоянием интегратора.
Чтобы сконфигурировать интегратор в течение дискретного времени, установите свойство Sample time на положительное, ненулевое значение, или на -1 наследовать шаг расчета от восходящего блока. Дискретное представление эквивалентно передаточной функции:
где Ts является шагом расчета. От дискретной передаточной функции уравнения интегратора определены с помощью прямого Метода Эйлера:
где:
u является входом интегратора.
x является состоянием интегратора.
y является интегратором вывод.
n является шагом времени симуляции.
x0 является начальным состоянием интегратора.
Можно задать начальные условия состояния с помощью параметра Initial condition.
Интегратор переносит свое состояние между заданными нижними значениями и верхними значениями. Эта схема показывает выходные параметры перенесенного и неперенесенного интегратора состояния для постоянного входа.
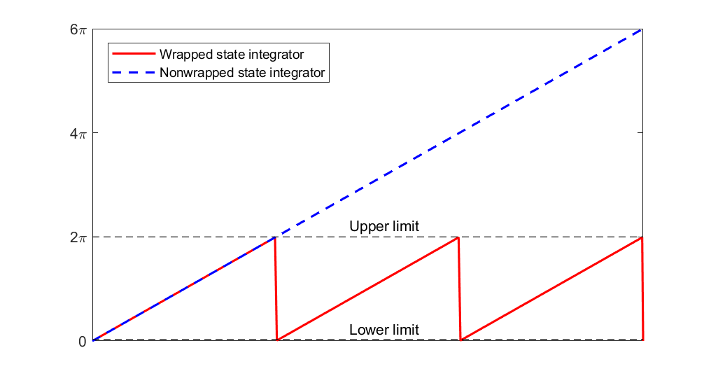
В схеме нижними и верхними пределами является 0 и 2π, соответственно.
[1] Методические рекомендации IEEE для системных моделей возбуждения для исследований устойчивости энергосистемы. Станд. IEEE 421.5-2016. Пискатауэй, NJ: IEEE-SA, 2016.


