Вычислите объединенные настройки, чтобы достигнуть положения исполнительного элемента конца
Robotics System Toolbox / Алгоритмы Манипулятора
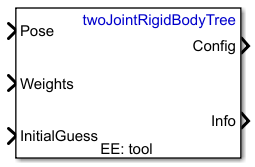
Блок Inverse Kinematics использует решатель кинематической инверсии (IK), чтобы вычислить объединенные настройки для желаемого положения исполнительного элемента конца на основе заданной модели дерева твердого тела. Создайте модель дерева твердого тела для своего робота с помощью класса robotics.RigidBodyTree. Модель дерева твердого тела задает все объединенные ограничения, которые осуществляет решатель.
Задайте объект RigidBodyTree и желаемый исполнительный элемент конца в маске блока. Можно также настроить параметры алгоритма во вкладке Solver Parameters.
Введите желаемый исполнительный элемент конца Pose, Weights на допуске положения и InitialGuess для объединенной настройки. Решатель выводит настройку робота, Config, который удовлетворяет положение исполнительного элемента конца в допусках, заданных во вкладке Solver Parameters.
[1] Badreddine, Хасан, Стефан Вэндьюалл и Йохан Мейерс. "Последовательное квадратичное программирование (SQP) для Оптимального управления в Прямой Числовой Симуляции Турбулентного течения". Журнал Вычислительной Физики. 256 (2014): 1–16. doi:10.1016/j.jcp.2013.08.044.
[2] Bertsekas, нелинейное программирование Димитри П. Белмонт, MA: научная Афина, 1999.
[3] Goldfarb, Дональд. "Расширение Переменного Метрического Метода Дэвидона к Максимизации При Линейных Ограничениях Неравенства и Равенства". SIAM Journal на Прикладной математике. Издание 17, № 4 (1969): 739–64. doi:10.1137/0117067.
[4] Nocedal, Хорхе и Стивен Райт. Числовая оптимизация. Нью-Йорк, Нью-Йорк: Спрингер, 2006.
[5] Sugihara, Tomomichi. "Беззаботная к разрешимости Инверсная кинематика Методом Levenberg–Marquardt". Транзакции IEEE на Робототехнике. Издание 27, № 5 (2011): 984–91. doi:10.1109/tro.2011.2148230.
[6] Чжао, Jianmin и Норман Ай. Бэдлер. "Расположение Инверсной кинематики Используя Нелинейное программирование для Высоко Ясно сформулированных фигур". Транзакции ACM на Графике. Издание 13, № 4 (1994): 313–36. doi:10.1145/195826.195827.

