Популярным альтернативным подходом к формированию цикла loopsyn является H ∞
формирование цикла смешанной чувствительности, которое реализовано командой программного обеспечения Robust Control Toolbox™:
K=mixsyn(G,W1,[],W3)
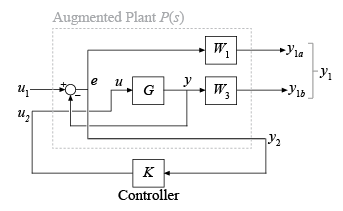
С контроллером mixsyn синтез, ваша производительность и уравнения спецификаций робастности устойчивости (2-2) и (2-4) объединены в одну спецификацию нормы бесконечности формы
где (см. MIXSYN H ∞ Ty1 u1 Формирования Цикла Смешанной Чувствительности):
Термин называется функцией стоимости смешанной чувствительности, потому что она штрафует и чувствительность S (s) и дополнительную чувствительность T (s). Формирование цикла достигается, когда вы выбираете W 1, чтобы иметь целевую форму цикла для частот ω <ωc, и вы выбираете 1/W3, чтобы быть целью для ω> ωc. В выборе спецификаций проекта W 1 и W 3 для проектирования контроллера mixsyn, необходимо гарантировать, что перекрестная частота на 0 дБ для Диаграммы Боде W 1 ниже перекрестной частоты на 0 дБ 1/W3, как показано в Спецификациях Сингулярного значения на L, S, и T, так, чтобы был разрыв для желаемой формы цикла, Gd, чтобы передать между производительностью связал W 1 и связанная робастность . В противном случае ваша производительность и требования робастности не будут достижимы.
MIXSYN H ∞ Ty1 u1 Формирования Цикла Смешанной Чувствительности
Чтобы сделать
H mixsyn ∞ проект синтеза смешанной чувствительности на модели HiMAT, запустите с модели объекта управления G, обсужденный в Проектировании контроллера Формирования Цикла Смешанной Чувствительности. Следующий код воссоздает ту модель объекта управления.
ag =[ -2.2567e-02 -3.6617e+01 -1.8897e+01 -3.2090e+01 3.2509e+00 -7.6257e-01;
9.2572e-05 -1.8997e+00 9.8312e-01 -7.2562e-04 -1.7080e-01 -4.9652e-03;
1.2338e-02 1.1720e+01 -2.6316e+00 8.7582e-04 -3.1604e+01 2.2396e+01;
0 0 1.0000e+00 0 0 0;
0 0 0 0 -3.0000e+01 0;
0 0 0 0 0 -3.0000e+01];
bg = [ 0 0;
0 0;
0 0;
0 0;
30 0;
0 30];
cg = [ 0 1 0 0 0 0;
0 0 0 1 0 0];
dg = [ 0 0;
0 0];
G = ss(ag,bg,cg,dg);Настройте производительность и границы робастности, W1 и W3.
s = zpk('s'); % Laplace variable s MS = 2; AS = .03; WS = 5; W1 = (s/MS+WS)/(s+AS*WS); MT = 2; AT = .05; WT = 20; W3 = (s+WT/MT)/(AT*s+WT);
Вычислите смешанную чувствительность H-бесконечности оптимальный контроллер K1 с помощью mixsyn.
[K1,CL1,GAM1] = mixsyn(G,W1,[],W3);
Затем вычислите ответы системы с обратной связью. Вычислите цикл L1, чувствительность S1 и дополнительная чувствительность T1.
L1 = G*K1;
I = eye(size(L1));
S1 = feedback(I,L1); % S=inv(I+L1);
T1 = I-S1;Наконец, постройте ответы частотного диапазона и временной интервал.
step(T1,1.5);
title('\alpha and \theta command step responses');
figure; sigma(I+L1,'--',T1,':',L1,'r--',W1/GAM1,'k--',GAM1/W3,'k-.',{.1,100}) legend('1/\sigma(S) performance','\sigma(T) robustness','\sigma(L) loopshape',... '\sigma(W1) performance bound','\sigma(1/W3) robustness bound')

