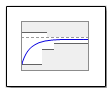
Переходной процесс линейной системы аппроксимирован из нелинейной модели Simulink
Simulink® Control Design™
Этот блок совпадает с блоком Check Linear Step Response Characteristics за исключением различных установок параметров по умолчанию во вкладке Bounds.
Вычислите линейную систему из нелинейной модели Simulink и постройте линейный переходной процесс.
Во время симуляции программное обеспечение линеаризует фрагмент модели между заданными вводами и выводами линеаризации и строит переходной процесс линейной системы.
Модель Simulink может быть непрерывной - или дискретное время или многоскоростной и может иметь задержки. Поскольку можно задать только одну пару ввода/вывода линеаризации в этом блоке, линейная система является Одно Входом Одно Выводом (SISO).
Можно задать границы переходного процесса и просмотреть их на графике. Можно также проверять, что границы удовлетворены во время симуляции:
Если все границы удовлетворены, блок ничего не делает.
Если связанное не удовлетворено, блок утверждает, и предупреждающее сообщение появляется в подсказке MATLAB®. Можно также указать что блок:
Выполните выражение MATLAB.
Остановите симуляцию и подчеркните тот блок.
Во время симуляции блок может также вывести логический сигнал утверждения:
Если все границы удовлетворены, сигнал верен (1).
Если связанное не удовлетворено, сигнал ложный (0).
Можно добавить несколько Линейных блоков Переходного процесса, чтобы вычислить и построить линейный переходной процесс различных фрагментов модели.
Можно сохранить линейную систему как переменную в рабочем пространстве MATLAB.
Блок не поддерживает генерацию кода и может использоваться только в режиме симуляции Normal.
Следующая таблица обобщает Линейные параметры блоков Переходного процесса, доступные через диалоговое окно параметров блоков.
| Задача | Параметры | |
|---|---|---|
| Сконфигурируйте линеаризацию. | Задайте вводы и выводы (I/Os). |
Во вкладке Linearizations: |
| Задайте настройки. |
Во вкладке Linearizations: | |
| Задайте опции алгоритма. |
В Algorithm Options вкладки Linearizations: | |
| Задайте метки для линейной системы I/Os и утвердите имена. |
В Labels вкладки Linearizations: | |
| Постройте линейную систему. | Show Plot | |
| (Необязательно) Задайте границы на переходном процессе линейной системы для утверждения. | Включайте переходной процесс, связанный в утверждение во вкладке Bounds. | |
| Задайте опции утверждения (только, когда вы зададите границы на линейной системе). |
Во вкладке Assertion: | |
| Сохраните линейную систему в рабочее пространство MATLAB. | Сохраните данные к рабочей области во вкладке Logging. | |
| Отобразите окно графика вместо диалогового окна параметров блоков при двойном клике по блоку. | Покажите график на открытом блоке. | |
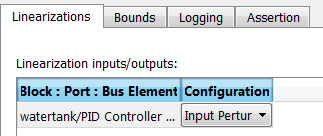
Вводы и выводы линеаризации, которые задают фрагмент нелинейной модели Simulink, чтобы линеаризовать.
Если вы задали ввод и вывод линеаризации в модели Simulink, блок автоматически обнаруживает эти точки и отображает их в области Linearization inputs/outputs. Щелкните![]() в любое время, чтобы обновить таблицу Linearization inputs/outputs с I/Os из модели. Добавить другие аналитические точки:
в любое время, чтобы обновить таблицу Linearization inputs/outputs с I/Os из модели. Добавить другие аналитические точки:
Щелкнуть![]() .
.
Диалоговое окно расширяется, чтобы отобразить область Click a signal in the model to select it и новую![]() кнопку.
кнопку.
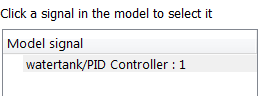
Выберите один или несколько сигналов в Редакторе Simulink.
Выбранные сигналы появляются под Model signal в области Click a signal in the model to select it.
(Необязательно) Для шин, расширьте сигнал шины выбрать отдельные элементы.
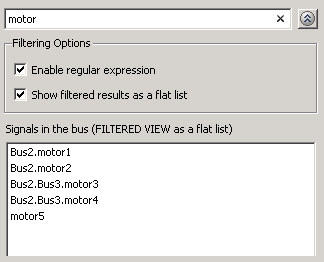
Для больших шин или других больших списков сигналов, можно ввести искомый текст для фильтрации имен элементов в окне редактирования Filter by name. Соответствие имени является чувствительным к регистру. Кроме того, можно ввести регулярное выражение MATLAB (MATLAB).
Чтобы изменить опции фильтрации, щелкнуть![]() . Чтобы скрыть опции фильтрации, щелкнуть
. Чтобы скрыть опции фильтрации, щелкнуть![]() .
.
Щелкните![]() , чтобы добавить выбранные сигналы в таблицу Linearization inputs/outputs.
, чтобы добавить выбранные сигналы в таблицу Linearization inputs/outputs.
Чтобы удалить сигнал из таблицы Linearization inputs/outputs, выберите сигнал и нажатие кнопки![]() .
.
Чтобы найти местоположение в модели Simulink, соответствующей сигналу в таблице Linearization inputs/outputs, выберите сигнал в таблице и нажатии кнопки![]() .
.
Таблица показывает следующую информацию о выбранном сигнале:
| Block : Port : Bus Element | Имя блока сопоставлено с вводом/выводом. Номер, смежный с именем блока, является номером порта, где выбранный сигнал шины расположен. Последняя запись является выбранным именем элемента шины. |
| Configuration |
Тип точки линеаризации:
|
Если вы моделируете модель, не задавая ввод или вывод, программное обеспечение не вычисляет линейную систему. Вместо этого вы видите предупреждающее сообщение в посдказке MATLAB.
Никакое значение по умолчанию
Включает выбор сигнала в модели Simulink. Появляется только, когда вы щелкаете![]() .
.
Когда эта опция появляется, вы также видите следующие изменения:
Новая![]() кнопка.
кнопка.
Используйте, чтобы добавить выбранный сигнал как ввод или вывод линеаризации в таблице Linearization inputs/outputs. Для получения дополнительной информации смотрите Linearization inputs/outputs.
![]() изменения в
изменения в![]() .
.
Используйте![]() , чтобы свернуть область Click a signal in the model to select it.
, чтобы свернуть область Click a signal in the model to select it.
Никакое значение по умолчанию
Включите использование регулярных выражений MATLAB для фильтрации имен сигнала. Например, ввод t$ в окне редактирования Filter by name отображает все сигналы, имена которых заканчиваются строчным t (и их непосредственные родители). Для получения дополнительной информации смотрите Регулярные выражения (MATLAB).
Значение по умолчанию: на
Позвольте использование регулярных выражений MATLAB для фильтрации имен сигнала.
Отключите использование регулярных выражений MATLAB для фильтрации имен сигнала. Фильтрация обрабатывает текст, который вы вводите в окне редактирования Filter by name как вектор буквенного символа.
Нажатие кнопки Options на правой стороне окна редактирования Filter by name (![]() ) включает этот параметр.
) включает этот параметр.
Использует плоский формат списка, чтобы отобразить список отфильтрованных сигналов, на основе искомого текста в окне редактирования Filter by name. Плоский формат списка использует запись через точку, чтобы отразить иерархию сигналов шины. Следующее является примером плоского формата списка для отфильтрованного набора вложенных сигналов шины.
Значение по умолчанию: 'off'
Отобразите отфильтрованный список сигналов с помощью плоского формата списка, указав на иерархии шины с записью через точку вместо того, чтобы использовать древовидный формат.
Отобразите отфильтрованные иерархии шины с помощью древовидного формата.
Нажатие кнопки Options на правой стороне окна редактирования Filter by name (![]() ) включает этот параметр.
) включает этот параметр.
Когда вычислить линейную систему во время симуляции.
Значение по умолчанию: Simulation snapshots
Simulation snapshotsОпределенное время симуляции, заданное в Snapshot times.
Используйте когда вы:
Знайте один или несколько раз, когда модель будет в установившейся рабочей точке
Хочу вычислить линейные системы в конкретные моменты времени
External triggerОснованное на триггере событие симуляции. Задайте триггерный тип в Trigger type.
Используйте, когда сигнал, сгенерированный во время симуляции, укажет на установившуюся рабочую точку.
Выбор этой опции добавляет триггерный порт в блок. Используйте этот порт, чтобы соединить блок с триггерным сигналом.
Например, для модели самолета, вы можете хотеть вычислить линейную систему каждый раз, когда топливная масса является частью максимальной топливной массы. В этом случае смоделируйте это условие как внешний триггер.
Установка этого параметра на Simulation snapshots включает Snapshot times.
Установка этого параметра на External trigger включает Trigger type.
Параметр: LinearizeAt |
| Ввод: символьный вектор |
Значение: 'SnapshotTimes' | 'ExternalTrigger' |
Значение по умолчанию: 'SnapshotTimes' |
Одно или несколько времен симуляции. Линейная система вычисляется в эти времена.
Значение по умолчанию: 0
Для различного времени симуляции введите время. Используйте когда вы:
Хочу построить линейную систему в определенное время
Знайте аппроксимированное время, когда модель достигнет установившейся рабочей точки
Для нескольких времен симуляции введите вектор. Используйте когда это необходимо, чтобы вычислить и построить линейные системы в многократно.
Времена снимка состояния должны быть меньше чем или равны времени симуляции, заданному в модели Simulink.
Выбор Simulation snapshots in Linearize on включает этот параметр.
Параметр: SnapshotTimes |
| Ввод: символьный вектор |
Значение: 0 | положительное вещественное число | вектор положительных вещественных чисел |
Значение по умолчанию: 0 |
Инициируйте тип внешнего триггера для вычисления линейной системы.
Значение по умолчанию: Rising edge
Rising edgeВозрастающее ребро внешнего триггерного сигнала.
Falling edgeПадающее ребро внешнего триггерного сигнала.
Выбор External trigger in Linearize on включает этот параметр.
Параметр: TriggerType |
| Ввод: символьный вектор |
Значение: 'rising' | 'falling' |
Значение по умолчанию: 'rising' |
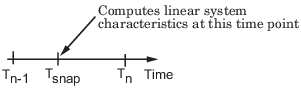
Позвольте обнаружению пересечения нулем гарантировать, что программное обеспечение вычисляет характеристики линейной системы в следующих временах симуляции:
Точные времена снимка состояния, заданные в Snapshot times.
Как показано в следующей фигуре, когда обнаружение пересечения нулем включено, переменный шаг, решатель Simulink моделирует модель во время снимка состояния Tsnap. Tsnap может находиться между шагами времени симуляции Tn-1 и Tn, которые автоматически выбраны решателем.
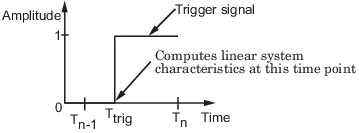
Точное время, когда внешний триггер обнаруживается, задало в Trigger type.
Как показано в следующей фигуре, когда обнаружение пересечения нулем включено, переменный шаг, решатель Simulink моделирует модель в то время, Ttrig, когда триггерный сигнал обнаруживается. Ttrig может находиться между шагами времени симуляции Tn-1 и Tn, которые автоматически выбраны решателем.
Для получения дополнительной информации об обнаружении пересечения нулем смотрите Обнаружение Пересечения нулем (Simulink) в Руководстве пользователя Simulink.
Значение по умолчанию: на
Вычислите характеристики линейной системы в точное время снимка состояния или точное время, когда триггерный сигнал будет обнаружен.
Эта установка проигнорирована, если решатель Simulink фиксируется шаг.
Вычислите характеристики линейной системы на шагах времени симуляции, которые выбирает решатель переменного шага. Программное обеспечение не может вычислить линейную систему в точное время снимка состояния или точное время, когда триггерный сигнал обнаруживается.
Параметр: ZeroCross |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'on' |
Как представлять задержки вашей линейной модели.
Используйте эту опцию, если у вас есть блоки в вашей модели, которые имеют задержки.
Значение по умолчанию: 'off'
Возвратите линейную модель с точными представлениями задержки.
Возвратите линейную модель с приближениями Padé задержек, как задано в вашей Транспортной Задержке и Переменных Транспортных блоках Задержки.
Параметр: UseExactDelayModel |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'off' |
Шаг расчета линейной системы вычисляется во время симуляции.
Используйте этот параметр для:
Вычислите систему дискретного времени с определенным шагом расчета от непрерывно-разовой системы
Передискретизируйте систему дискретного времени с различным шагом расчета
Вычислите непрерывно-разовую систему из системы дискретного времени
При вычислении систем дискретного времени из непрерывно-разовых систем и наоборот, программное обеспечение использует метод преобразования, заданный в Sample time rate conversion method.
Значение по умолчанию: auto
'auto'. Вычисляет шаг расчета как:0, для непрерывно-разовых моделей.
Для моделей, которые имеют блоки с различными шагами расчета (многоскоростные модели), наименьшее общее кратное шагов расчета. Например, если у вас есть соединение блоков непрерывно-разового и дискретного времени с шагами расчета 0, 0.2 и 0.3, шаг расчета линейной модели 0.6.
Линейная система дискретного времени от непрерывно-разовой системы.
Линейная система дискретного времени от другой системы дискретного времени с различным шагом расчета
Используйте, чтобы вычислить непрерывно-разовую линейную систему из модели дискретного времени.
Параметр: SampleTime |
| Ввод: символьный вектор |
Значение:
'auto' | Положительное конечное значение | '0' |
Значение по умолчанию:
'auto' |
Метод для преобразования шага расчета односкоростных или многоскоростных моделей.
Этот параметр используется только, когда значением Linear system sample time не является auto.
Значение по умолчанию: Zero-Order Hold
Zero-Order HoldНулевой порядок содержит, где входные параметры управления приняты кусочная константа за время выборки Ts. Для получения дополнительной информации смотрите, что Нулевой Порядок Содержит (Control System Toolbox).
Этот метод обычно выполняет лучше во временном интервале.
Tustin (bilinear)Билинейный (Тастин) приближение без предварительного деформирования частоты. Программное обеспечение округляет дробные задержки до самого близкого кратного время выборки. Для получения дополнительной информации смотрите Приближение Тастина (Control System Toolbox).
Этот метод обычно выполняет лучше в частотном диапазоне.
Tustin with PrewarpingБилинейный (Тастин) приближение с предварительным деформированием частоты. Также задайте частоту перед деформацией в Prewarp frequency (rad/s). Для получения дополнительной информации смотрите Приближение Тастина (Control System Toolbox).
Этот метод обычно выполняет лучше в частотном диапазоне. Используйте этот метод, чтобы гарантировать соответствие в видимой области частоты.
Upsampling when possible, Zero-Order Hold otherwiseСверхдискретизируйте систему дискретного времени, когда возможный и будут использовать Zero-Order Hold в противном случае.
Можно сверхдискретизировать только, когда вы преобразовываете систему дискретного времени в новый более быстрый шаг расчета, который является целочисленным кратным шаг расчета исходной системы.
Upsampling when possible, Tustin otherwiseСверхдискретизируйте систему дискретного времени, когда возможный и будут использовать Tustin (bilinear) в противном случае.
Можно сверхдискретизировать только, когда вы преобразовываете систему дискретного времени в новый более быстрый шаг расчета, который является целочисленным кратным шаг расчета исходной системы.
Upsampling when possible, Tustin with Prewarping otherwiseСверхдискретизируйте систему дискретного времени, когда возможный и будут использовать Tustin with Prewarping в противном случае. Кроме того, задайте частоту перед деформацией в Prewarp frequency (rad/s).
Можно сверхдискретизировать только, когда вы преобразовываете систему дискретного времени в новый более быстрый шаг расчета, который является целочисленным кратным шаг расчета исходной системы.
Выбор также:
Tustin with Prewarping
Upsampling when possible, Tustin with Prewarping otherwise
включает Prewarp frequency (rad/s).
Параметр: RateConversionMethod |
| Ввод: символьный вектор |
Значение: 'zoh' | 'tustin' | 'prewarp' | 'upsampling_zoh' | 'upsampling_tustin' | 'upsampling_prewarp' |
Значение по умолчанию: 'zoh' |
Предварительно деформируйте частоту для метода Тастина, заданного в радианах/секунда.
Значение по умолчанию: 10
Значение положительной скалярной величины, меньшее, чем частота Найквиста до и после передискретизации. Значение 0 соответствует стандартному методу Тастина без предварительного деформирования частоты.
Выбор также
Tustin with Prewarping
Upsampling when possible, Tustin with Prewarping otherwise
в Sample time rate conversion method включает этот параметр.
Параметр: PreWarpFreq |
| Ввод: символьный вектор |
Значение: 10 | значение положительной скалярной величины |
Значение по умолчанию: 10 |
Как состояние, имена ввода и вывода появляются в линейной системе, вычисленной во время симуляции.
Линейная система является объектом пространства состояний, и системные состояния и имена ввода/вывода появляются в следующих свойствах объектов пространства состояний:
| Введите, Вывод или имя состояния | Появляется в который свойство объекта пространства состояний |
|---|---|
| Имя входа Linearization | InputName |
| Linearization имя вывода | OutputName |
| Имена состояния | StateName |
Значение по умолчанию: 'off'
Состояние показа и ввод/вывод называют с их путем через иерархию модели. Например, в chemical reactor model, состояние в блоке Integrator1 подсистемы CSTR появляется с полным путем как scdcstr/CSTR/Integrator1.
Покажите только имена ввода/вывода и состояние. Используйте эту опцию, когда имя сигнала уникально, и вы знаете, где сигнал является местоположением в вашей модели Simulink. Например, состояние в блоке Integrator1 подсистемы CSTR появляется как Integrator1.
Параметр: UseFullBlockNameLabels |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'off' |
Как маркировать сигналы сопоставленными вводами и выводами линеаризации на шинах, в линейной системе, вычисленной во время симуляции (применяется только, когда вы выбираете целую шину как точку ввода-вывода).
Выбор целого сигнала шины не рекомендуется. Вместо этого выберите отдельные элементы шины.
Вы не можете использовать этот параметр, когда ваша модель имеет смеси мультиплексора/шины.
Значение по умолчанию: 'off'
Используйте имена сигнала отдельных элементов шины.
Имена шины сигнала появляются, когда ввод и вывод при выводе следующих блоков:
Блок импорта корневого уровня, содержащий объект шины
Соедините шиной блок создателя
Блок Subsystem, источник которого прослеживает до одного из следующих блоков:
Вывод блока создателя шины
Импорт корневого уровня блокируется путем прохождения только через виртуальные или невиртуальные контуры подсистемы
Используйте номер канала сигнала шины.
Параметр: UseBusSignalLabels |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'off' |
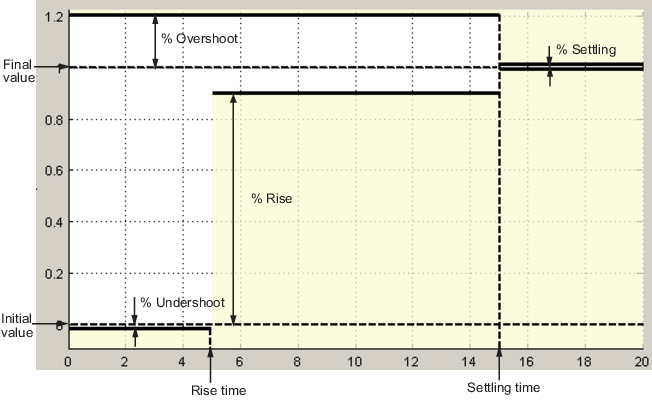
Проверяйте, что линейный переходной процесс удовлетворяет все характеристики, заданные в:
Программное обеспечение выводит предупреждение, если переходной процесс нарушает заданные значения.
Этот параметр используется для утверждения, только если Enable assertion во вкладке Assertion выбран.
Границы также появляются на переходном процессе, как показано в следующей фигуре.
Если вы очищаете Enable assertion, границы не используются для утверждения, но продолжают появляться на графике.
Значение по умолчанию:
Прочь для блока Linear Step Response Plot.
На для блока Check Linear Step Response Characteristics.
Проверяйте, что переходной процесс удовлетворяет заданные границы, во время симуляции.
Не проверяйте, что переходной процесс удовлетворяет заданные границы, во время симуляции.
Очистка этого параметра отключает границы переходного процесса, и программное обеспечение прекращает проверять, что границы удовлетворены во время симуляции. Ограниченные сегменты также greyed на графике.
Чтобы только просмотреть границы на графике, очистите Enable assertion.
Параметр:
EnableStepResponseBound |
| Ввод: символьный вектор |
Значение:
'on' | 'off' |
Значение по умолчанию:
'off' для блока Linear Step Response Plot, 'on' для блока Check Linear Step Response Characteristics. |
Окончательное значение уровня выходного сигнала в ответ на шаг вводится.
Значение по умолчанию:
[] для блока Linear Step Response Plot
1 для блока Check Linear Step Response Characteristics
Конечный действительный скаляр.
Чтобы утверждать, что окончательное значение удовлетворено, выберите Include step response bound in assertion и Enable assertion.
Чтобы изменить окончательное значение из окна графика, перетащите соответствующий ограниченный сегмент. Также щелкните правой кнопкой по сегменту и выберите Bounds> Edit. Задайте новое значение в Final value. Необходимо нажать Update Block прежде, чем моделировать модель.
Параметр:
FinalValue |
| Ввод: символьный вектор |
Значение:
[] | 1 | конечный действительный скаляр. Должен быть задан в одинарных кавычках (''). |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '1' для блока Check Linear Step Response Characteristics. |
Потраченное время, в секундах, для переходного процесса, чтобы достигнуть процента окончательного значения, заданного в % Rise.
Значение по умолчанию:
[] для блока Linear Step Response Plot
5 для блока Check Linear Step Response Characteristics
Конечный положительный действительный скаляр, меньше, чем время установления.
Чтобы утверждать, что время нарастания удовлетворено, выберите Include step response bound in assertion и Enable assertion.
Чтобы изменить время нарастания из окна графика, перетащите соответствующий ограниченный сегмент. Также щелкните правой кнопкой по сегменту и выберите Bounds> Edit. Задайте новое значение в Rise time. Необходимо нажать Update Block прежде, чем моделировать модель.
Параметр:
RiseTime |
| Ввод: символьный вектор |
Значение:
[] | 5 | конечный положительный действительный скаляр. Должен быть задан в одинарных кавычках (''). |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '5' для блока Check Linear Step Response Characteristics. |
Процент окончательного значения используется с Rise time.
Значение по умолчанию:
Минимум: 0
Максимум: 100
[] для блока Linear Step Response Plot
80 для блока Check Linear Step Response Characteristics
Положительная скалярная величина, меньше, чем (100 – урегулирование %).
Чтобы утверждать, что повышение процента удовлетворено, выберите Include step response bound in assertion и Enable assertion.
Чтобы изменить повышение процента из окна графика, перетащите соответствующий ограниченный сегмент. Также щелкните правой кнопкой по сегменту и выберите Bounds> Edit. Задайте новое значение в % Rise. Необходимо нажать Update Block прежде, чем моделировать модель.
Параметр:
PercentRise |
| Ввод: символьный вектор |
Значение:
[] | 80 | положительная скалярная величина между 0 и 100. Должен быть задан в одинарных кавычках (''). |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '80' для блока Check Linear Step Response Characteristics. |
Время, в секундах, потраченных для переходного процесса, чтобы обосноваться в заданной области значений вокруг окончательного значения. Эта область значений урегулирования задана как окончательное значение плюс или минус процент окончательного значения, задала в % Settling.
Значение по умолчанию:
[] для блока Linear Step Response Plot
7 для блока Check Linear Step Response Characteristics
Конечный положительный действительный скаляр, больше, чем время нарастания.
Чтобы утверждать, что время установления удовлетворено, выберите Include step response bound in assertion и Enable assertion.
Чтобы изменить время установления из окна графика, перетащите соответствующий ограниченный сегмент. Также щелкните правой кнопкой по сегменту и выберите Bounds> Edit. Задайте новое значение в Settling time. Необходимо нажать Update Block прежде, чем моделировать модель.
Параметр:
SettlingTime |
| Ввод: символьный вектор |
Значение:
[] | 7 | положительный конечный действительный скаляр. Должен быть задан в одинарных кавычках (''). |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '7' для блока Check Linear Step Response Characteristics. |
Процент окончательного значения, которое задает обосновывающуюся область значений Settling time.
Значение по умолчанию:
Минимум: 0
Максимум: 100
[] для блока Linear Step Response Plot
1 для блока Check Linear Step Response Characteristics
Вещественное число, меньше, чем (100 – повышение %) и меньше, чем перерегулирование %.
Чтобы утверждать, что урегулирование процента удовлетворено, выберите Include step response bound in assertion и Enable assertion.
Чтобы изменить процент, обосновывающийся из окна графика, перетащите соответствующий ограниченный сегмент. Также щелкните правой кнопкой по сегменту и выберите Bounds> Edit. Задайте новое значение в % Settling. Необходимо нажать Update Block прежде, чем моделировать модель.
Параметр:
PercentSettling |
| Ввод: символьный вектор |
Значение:
[] | 1 | действительное значение между 0 и 100. Должен быть задан в одинарных кавычках (''). |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '1' для блока Check Linear Step Response Characteristics. |
Сумма, которой переходной процесс может превысить окончательное значение, заданное как процент.
Значение по умолчанию:
Минимум: 0
Максимум: 100
[] для блока Linear Step Response Plot
10 для блока Check Linear Step Response Characteristics
Вещественное число, больше, чем урегулирование %.
Чтобы утверждать, что перерегулирование процента удовлетворено, выберите Include step response bound in assertion и Enable assertion.
Чтобы изменить перерегулирование процента из окна графика, перетащите соответствующий ограниченный сегмент. Также щелкните правой кнопкой по сегменту и выберите Bounds> Edit. Задайте новое значение в % Overshoot. Необходимо нажать Update Block прежде, чем моделировать модель.
Параметр:
PercentOvershoot |
| Ввод: символьный вектор |
Значение:
[] | 10 | действительное значение между 0 и 100. Должен быть задан в одинарных кавычках (''). |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '10' для блока Check Linear Step Response Characteristics. |
Сумма, которой переходной процесс может недостаточно подняться начальное значение, заданное как процент.
Значение по умолчанию:
Минимум: 0
Максимум: 100
[] для блока Linear Step Response Plot
1 для блока Check Linear Step Response Characteristics
Вещественное число.
Чтобы утверждать, что отклонение от номинала процента удовлетворено, выберите Include step response bound in assertion и Enable assertion.
Чтобы изменить отклонение от номинала процента из окна графика, перетащите соответствующий ограниченный сегмент. Также щелкните правой кнопкой по сегменту и выберите Bounds> Edit. Задайте новое значение в % Undershoot. Необходимо нажать Update Block прежде, чем моделировать модель.
Параметр:
PercentUndershoot |
| Ввод: символьный вектор |
Значение:
[] | 1 | действительное значение между 0 и 100. Должен быть задан в одинарных кавычках (''). |
Значение по умолчанию:
'1' |
Сохраните одну или несколько линейных систем, чтобы выполнить далее линейный анализ или систему управления.
Сохраненные данные находятся в структуре, поля которой включают:
время Времена симуляции, в которых вычисляются линейные системы.
значения Модель в пространстве состояний, представляющая линейную систему. Если линейная система вычисляется в нескольких временах симуляции, values является массивом моделей в пространстве состояний.
operatingPoints — Рабочие точки, соответствующие каждой линейной системе в values. Это поле существует, только если Save operating points for each linearization проверяется.
Местоположение сохраненной структуры данных зависит от настройки модели Simulink:
Если модель Simulink не сконфигурирована, чтобы сохранить симуляцию вывод как отдельный объект, структура данных является переменной в рабочем пространстве MATLAB.
Если модель Simulink сконфигурирована, чтобы сохранить симуляцию вывод как отдельный объект, структура данных является полем в объекте Simulink.SimulationOutput, который содержит регистрируемые данные моделирования.
Чтобы сконфигурировать вашу модель, чтобы сохранить симуляцию вывод в отдельном объекте, в редакторе Simulink, выбирают Simulation> Model Configuration Parameters. В диалоговом окне Configuration Parameters, в панели Импорта/Экспорта Данных, Single simulation output проверки.
Для получения дополнительной информации о регистрации данных в Simulink, смотрите Данные моделирования Экспорта (Simulink) и страница с описанием Simulink.SimulationOutput.
Значение по умолчанию: 'off'
Сохраните вычисленную линейную систему.
Не сохраняйте вычисленную линейную систему.
Этот параметр включает Variable name.
Параметр: SaveToWorkspace |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'off' |
Имя структуры данных, которая хранит одну или несколько линейных систем, вычисленных во время симуляции.
Местоположение сохраненной структуры данных зависит от настройки модели Simulink:
Если модель Simulink не сконфигурирована, чтобы сохранить симуляцию вывод как отдельный объект, структура данных является переменной в рабочем пространстве MATLAB.
Если модель Simulink сконфигурирована, чтобы сохранить симуляцию вывод как отдельный объект, структура данных является полем в объекте Simulink.SimulationOutput, который содержит регистрируемые данные моделирования.
Имя должно быть уникальным среди имен переменных, используемых во всех блоках модели регистрации данных, таким как Линейные блоки Графика для анализа, блоки Model Verification, блоки Осциллографа, К блокам Рабочей области и возвращаемым переменным симуляции, таким как время, состояния и выходные параметры.
Для получения дополнительной информации о регистрации данных в Simulink, смотрите Данные моделирования Экспорта (Simulink) и страница с описанием Simulink.SimulationOutput.
Значение по умолчанию: sys
Символьный вектор.
Save data to workspace включает этот параметр.
Параметр: SaveName |
| Ввод: символьный вектор |
Значение: sys | любой вектор символов. Должен быть задан в одинарных кавычках (''). |
Значение по умолчанию: 'sys' |
При сохранении линейных систем в рабочую область для последующего анализа или системы управления, также сохраните рабочую точку, соответствующую каждой линеаризации. Используя эту опцию добавляет поле под названием operatingPoints к структуре данных, которая хранит сохраненные линейные системы.
Значение по умолчанию: 'off'
Сохраните рабочие точки.
Не сохраняйте рабочие точки.
Save data to workspace включает этот параметр.
Параметр: SaveOperatingPoint |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'off' |
Позвольте блоку проверять, что границы, заданные и включенные для утверждения во вкладку Bounds, удовлетворены во время симуляции. Утверждение перестало работать, если связанное не удовлетворено. Предупреждение, сообщая об отказе утверждения, появляется в посдказке MATLAB.
Если утверждение перестало работать, можно опционально указать что блок:
Выполните выражение MATLAB, заданное в Simulation callback when assertion fails (optional).
Остановите симуляцию и подчеркните тот блок путем выбора Stop simulation when assertion fails.
Для Линейных блоков Графиков для анализа этот параметр не имеет никакого эффекта, потому что никакие границы не включены по умолчанию. Если вы хотите использовать Линейные блоки Графиков для анализа для утверждения, задать и включать границы во вкладку Bounds.
Очистка этого параметра отключает утверждение; то есть, блок больше не проверяет, что заданные границы удовлетворены. Значок блока также обновляет, чтобы указать, что утверждение отключено.
В модели Simulink, в диалоговом окне Configuration Parameters, параметр Model Verification block enabling позволяет вам включить или отключить все образцовые блоки верификации в модели, независимо от установки этой опции в блоке.
Значение по умолчанию: на
Проверяйте, что границы, включенные для утверждения во вкладку Bounds, удовлетворены во время симуляции. Предупреждение, сообщая об отказе утверждения, выведено в посдказке MATLAB, если границы нарушены.
Не проверяйте, что границы, включенные для утверждения, удовлетворены во время симуляции.
Этот параметр включает:
Simulation callback when assertion fails (optional)
Stop simulation when assertion fails
Параметр: enabled |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'on' |
Выражение MATLAB, чтобы выполниться, когда утверждение перестало работать.
Поскольку выражение выполнено в рабочем пространстве MATLAB, задайте все переменные, используемые в выражении в той рабочей области.
Никакое значение по умолчанию
Выражение MATLAB.
Enable assertion включает этот параметр.
Параметр: callback |
| Ввод: символьный вектор |
Значение: '' | выражение MATLAB |
Значение по умолчанию: '' |
Остановите симуляцию, когда связанное, заданное во вкладке Bounds, будет нарушено во время симуляции, т.е. сбоев утверждения.
Если при запуске симуляцию из Редактора Simulink, окно Simulation Diagnostics открывается, чтобы отобразить сообщение об ошибке. Кроме того, блок, где связанное нарушение происходит, подсвечен в модели.
Значение по умолчанию: 'off'
Остановите симуляцию, если связанное, заданное во вкладке Bounds, нарушено.
Продолжите симуляцию, если связанное нарушено с предупреждающим сообщением в посдказке MATLAB.
Поскольку выбор этой опции останавливает симуляцию, как только утверждение перестало работать, об отказах утверждения, которые могут произойти позже во время симуляции, не сообщают. Если вы хотите, чтобы все отказы утверждения были сообщены, не выбирайте эту опцию.
Enable assertion включает этот параметр.
Параметр: stopWhenAssertionFail |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'off' |
Выведите булев сигнал, который, на каждом временном шаге:
Верный (1), если утверждение успешно выполняется; то есть, все границы удовлетворены
Ложь (1), если утверждение перестало работать; то есть, связанное нарушено.
Тип данных выходного сигнала является булевской переменной, только если, в модели Simulink, в диалоговом окне Configuration Parameters, параметр Implement logic signals as Boolean data выбран. В противном случае тип данных выходного сигнала является двойным.
Выбор этого параметра добавляет выходной порт в блок, который можно соединить с любым блоком в модели.
Дефолт:офф
Выведите булев сигнал указать на состояние утверждения. Добавляет порт к блоку.
Не выводите булев сигнал указать на состояние утверждения.
Используйте этот параметр, чтобы разработать комплексную логику утверждения. Для примера смотрите, Проверяют Модель Используя Simulink Control Design и Блоки Верификации Simulink.
Параметр: export |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'off' |
Откройте окно графика вместо диалогового окна Block Parameters, когда вы дважды кликнете блок в модели Simulink.
Используйте этот параметр, если вы предпочитаете открывать и выполнять задачи, такие как добавление или изменение границ, в окне графика вместо диалогового окна Block Parameters. Если вы хотите получить доступ к параметрам блоков из окна графика, выберите Edit или нажатие кнопки![]() .
.
Для получения дополнительной информации о графике смотрите Show Plot.
Значение по умолчанию: 'off'
Откройте окно графика, когда вы дважды кликнете блок.
Откройте диалоговое окно Block Parameters, когда вы дважды кликнете блок.
Параметр: LaunchViewOnOpen |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'off' |
Откройте окно графика.
Используйте график просмотреть:
Характеристики системы и сигналы вычисляются во время симуляции
Необходимо нажать эту кнопку, прежде чем вы моделируете модель, чтобы просмотреть характеристики системы или сигнал.
Можно отобразить дополнительные характеристики, такие как время максимальной чувствительности, путем щелчка правой кнопкой по графику и выбора Characteristics.
Границы
Можно задать границы во вкладке Bounds диалогового окна Block Parameters или щелкнуть правой кнопкой по графику и выбрать Bounds> New Bound. Для получения дополнительной информации о типах границ можно задать, видеть отдельные страницы с описанием.
Можно изменить границы путем перетаскивания ограниченного сегмента или путем щелчка правой кнопкой по графику и выбора Bounds> Edit Bound. Прежде чем вы моделируете модель, нажмите Update Block, чтобы обновить связанное значение в параметрах блоков.
Типичные задачи, которые вы выполняете в окне графика, включают:
Открытие диалогового окна Block Parameters путем нажатия![]() или выбора Edit.
или выбора Edit.
Нахождение блока, которому окно графика соответствует путем нажатия![]() или выбора View> Highlight Simulink Block. Это действие делает окно модели активным и подсвечивает блок.
или выбора View> Highlight Simulink Block. Это действие делает окно модели активным и подсвечивает блок.
Симуляция модели путем нажатия![]() или выбора Simulation> Start. Это действие также линеаризует фрагмент модели между заданным вводом и выводом линеаризации.
или выбора Simulation> Start. Это действие также линеаризует фрагмент модели между заданным вводом и выводом линеаризации.
Добавление легенды на графике характеристики линейной системы путем нажатия![]() .
.
Чтобы оптимизировать образцовый ответ, чтобы соответствовать конструктивным требованиям, заданным во вкладке Bounds, откройте инструмент Response Optimization путем выбора Tools> Response Optimization в окне графика. Эта опция только доступна, если вам установили программное обеспечение Simulink Design Optimization™.
Откройте инструмент Response Optimization, чтобы оптимизировать образцовый ответ, чтобы соответствовать конструктивным требованиям, заданным во вкладке Bounds.
Эта кнопка доступна, только если вам установили программное обеспечение Simulink Design Optimization.
Разработайте оптимизацию, чтобы удовлетворить требования переходного процесса (графический интерфейс пользователя) (Simulink Design Optimization)
Разработайте оптимизацию, чтобы соответствовать времени - и требования частотного диапазона (графический интерфейс пользователя) (Simulink Design Optimization)
Визуализируйте предвещают ответ модели Simulink во время симуляции
Визуализируйте линейную систему в нескольких снимках состояния симуляции
Визуализируйте линейную систему непрерывно-разовой модели, дискретизированной во время симуляции
Графический вывод характеристик линейной системы химического реактора
