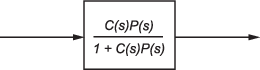
Ответ разомкнутого цикла системы управления является объединенным ответом объекта и контроллера, исключая эффект обратной связи. Например, следующая блок-схема показывает одноконтурную систему управления.
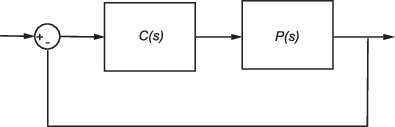
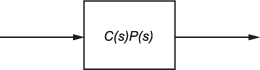
Если контроллер, C (s) и объект, P (s), линеен, соответствующей передаточной функцией разомкнутого цикла является C (s) P (s).
Чтобы удалить эффекты обратной связи, вставьте цикл вводная аналитическая точка, вручную не повреждая сигнальную линию. Вручную удаление сигнала обратной связи из нелинейной модели изменяет образцовую рабочую точку и производит различную линеаризовавшую модель. Для получения дополнительной информации смотрите Как Открытия Цикла Обработок программного обеспечения.
Если вы не вставляете открытие цикла, получившаяся линейная модель включает эффекты обратной связи.
Чтобы задать цикл, открывающийся для этого примера, можно использовать любую из следующих аналитических точек.
| Аналитическая точка | Описание | Вычислить C (s) P (s) |
|---|---|---|
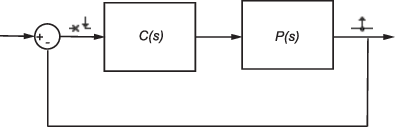
| Задает открытие цикла, сопровождаемое входным возмущением. | Задайте вход разомкнутого цикла во входе контроллеру и выходному измерению при выводе объекта.
| |
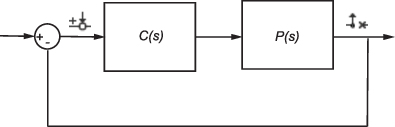
| Задает выходное измерение, сопровождаемое пропуском цикла. | Задайте разомкнутый цикл вывод при выводе объекта и входного возмущения во входе контроллера.
|
Для некоторых систем вы не можете задать цикл, открывающийся в том же местоположении как точка ввода или вывода линеаризации. Например, чтобы открыть внешний цикл в следующей системе, точка открытия цикла добавляется к пути к обратной связи с помощью аналитической точки пропуска цикла![]() . В результате только синие блоки находятся на пути к линеаризации.
. В результате только синие блоки находятся на пути к линеаризации.

При размещении цикла, открывающегося в том же местоположении, когда, сигнал ввода или вывода также удалил бы эффект внутреннего цикла от результата линеаризации.
Можно задать аналитические точки непосредственно в модели Simulink® в Linear Analysis Tool, или в командной строке. Для получения дополнительной информации, о различных типах аналитических точек и как задать их, смотрите, Задают Фрагмент Модели, чтобы Линеаризовать.
Этот пример показывает, как вычислить линейную модель объединенной системы объекта контроллера без эффектов сигнала обратной связи. Можно анализировать получившееся линейное образцовое использование, например, Диаграмму Боде.
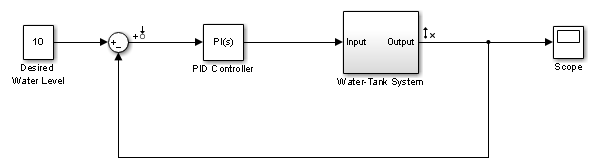
Открытая модель Simulink.
sys = 'watertank';
open_system(sys)
Блок Water-Tank System представляет объект в этой системе управления и содержит всю системную нелинейность.
В Редакторе Simulink задайте фрагмент модели, чтобы линеаризовать. В данном примере задайте открытие цикла с помощью разомкнутого цикла выходная аналитическая точка.
Щелкните правой кнопкой по входному сигналу блока PID Controller (вывод блока Sum) и выберите Linear Analysis Points> Input Perturbation.
Щелкните правой кнопкой по Системному выходному сигналу Бака для воды и выберите Linear Analysis Points> Open-loop Output.
Аннотации появляются в модели, указывающей, какие сигналы определяются как аналитические точки.
Если вы не хотите вводить изменения в модели Simulink, можно задать аналитические точки в Linear Analysis Tool. Для получения дополнительной информации смотрите, Задают Фрагмент Модели, чтобы Линеаризовать в Linear Analysis Tool.
Откройте Linear Analysis Tool для модели.
В Редакторе Simulink выберите Analysis> Control Design> Linear Analysis.
По умолчанию анализ указывает, что вы задали в модели, выбраны для линеаризации, как отображено в Analysis I/Os выпадающий список.
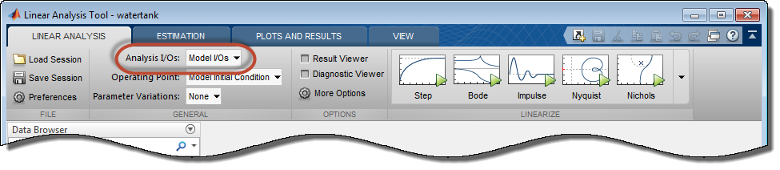
Чтобы линеаризовать модель с помощью заданных аналитических точек и сгенерировать Диаграмму Боде линеаризовавшей модели, нажмите![]() Bode.
Bode.
По умолчанию Linear Analysis Tool линеаризует модель в образцовых начальных условиях, как показано в Operating Point выпадающий список. Для примеров линеаризации модели в различной рабочей точке смотрите, Линеаризуют в Обрезанной Рабочей точке и Линеаризуют в Снимке состояния Симуляции.
Чтобы сгенерировать типы ответа кроме Диаграммы Боде, нажмите соответствующую кнопку в галерее графика.
Чтобы просмотреть минимальные запасы устойчивости для модели, щелкните правой кнопкой по Диаграмме Боде и выберите Characteristics> Minimum Stability Margins.
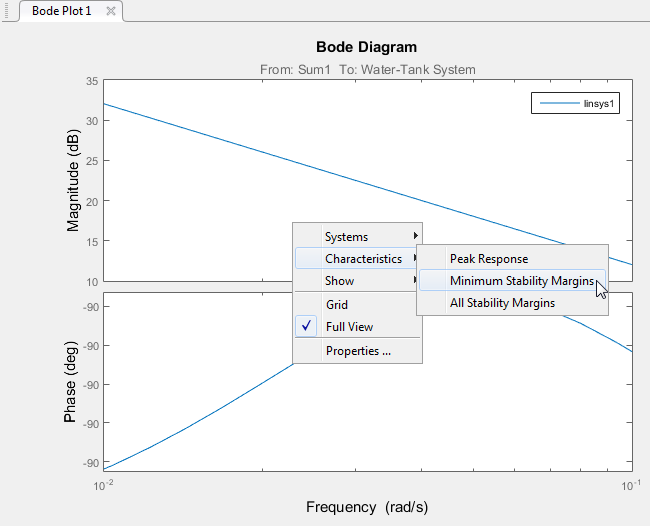
Диаграмма Боде отображает маркер поля фазы. Чтобы показать всплывающую подсказку, которая содержит значение поля фазы, кликните по маркеру.
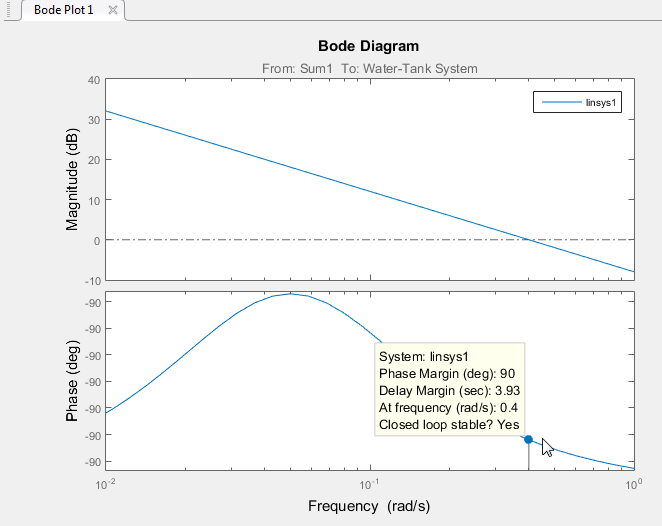
Для этой системы поле фазы является 90 градусами на перекрестной частоте 0,4 рад/с.
Этот пример показывает, как вычислить линейную модель объединенной системы объекта контроллера без эффектов сигнала обратной связи. Можно анализировать получившееся линейное образцовое использование, например, Диаграмму Боде.
Открытая модель Simulink.
sys = 'watertank';
open_system(sys)

Задайте фрагмент модели, чтобы линеаризовать путем создания массива аналитических точек с помощью команды linio:
Точка ввода разомкнутого цикла во входе блока PID Controller. Этот сигнал происходит при выводе блока Sum1.
Выведите измерение при выводе блока Water-Tank System.
io(1) = linio('watertank/Sum1',1,'openinput'); io(2) = linio('watertank/Water-Tank System',1,'output');
Входная аналитическая точка разомкнутого цикла включает открытие цикла, которое повреждает поток сигналов и удаляет эффекты обратной связи.
Линеаризуйте модель в образцовой рабочей точке по умолчанию с помощью команды linearize.
linsys = linearize(sys,io);
linsys является линеаризовавшей передаточной функцией разомкнутого цикла системы. Можно теперь анализировать ответ, например, строя его частотную характеристику и просматривая запасы по амплитуде и фазе.
margin(linsys)

Для этой системы поле усиления бесконечно, и поле фазы является 90 градусами на перекрестной частоте 0,4 рад/с.
Linear Analysis Tool | linearize