6DOF твердый кузов, чтобы вычислить переводное и вращательное движение
Vehicle Dynamics Blockset / Кузов
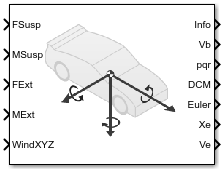
Блок Vehicle Body 6DOF реализует шесть степени свободы (DOF) твердая модель кузова 2D оси, чтобы вычислить продольный, боковой, вертикальный, подача, список и движение отклонения от курса. Блок составляет массу тела, инерцию, аэродинамическое перетаскивание, дорожную наклонную поверхность и распределение веса между осями из-за приостановки и внешних сил и моменты. Используйте параметры Inertial Loads, чтобы анализировать динамику аппарата при различных условиях загрузки.
Можно соединить блок с виртуальными датчиками, системой подвески или внешними системами как приводы управления телом. Используйте блок Vehicle Body 6DOF в поездке и обрабатывающих исследованиях, чтобы смоделировать эффекты силы сопротивления, пассажирской загрузки и приостановки hardpoint местоположения.
Чтобы анализировать динамику аппарата при различных условиях загрузки, используйте параметры Inertial Loads. А именно, можно задать эти загрузки:
Передняя трансмиссия
Передние и задние пассажиры строки
Служебный груз
Задний груз
Для каждой из загрузок можно задать массу, местоположение и инерцию.
Точки на этом рисунке указывают на местоположения загрузки в качестве примера. Таблица обеспечивает соответствующие настройки знака параметра положения.
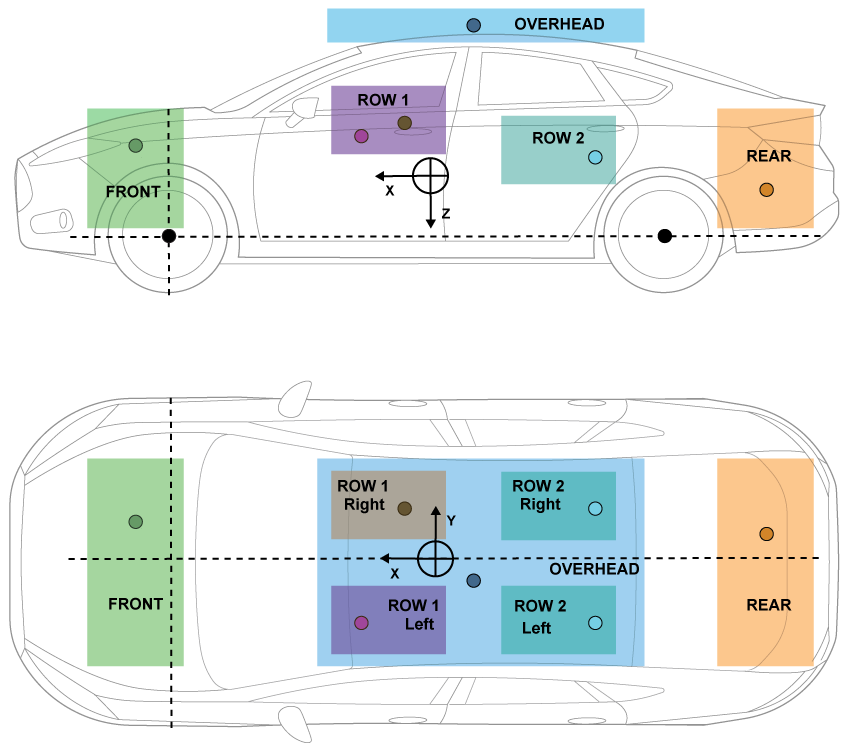
Эта таблица суммирует установки параметров, которые задают местоположения загрузки, обозначенные точками. Для местоположения блок использует этот вектор расстояния:
Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси X
Средняя линия автомобиля, чтобы загрузить, вдоль зафиксированной автомобилем оси Y
Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси z
Загрузка | Параметр | Местоположение в качестве примера |
|---|---|---|
Передняя сторона | Distance vector from front axle, z1R |
|
Наверху | Distance vector from front axle, z2R |
|
Строка 1, левая сторона | Distance vector from front axle, z3R |
|
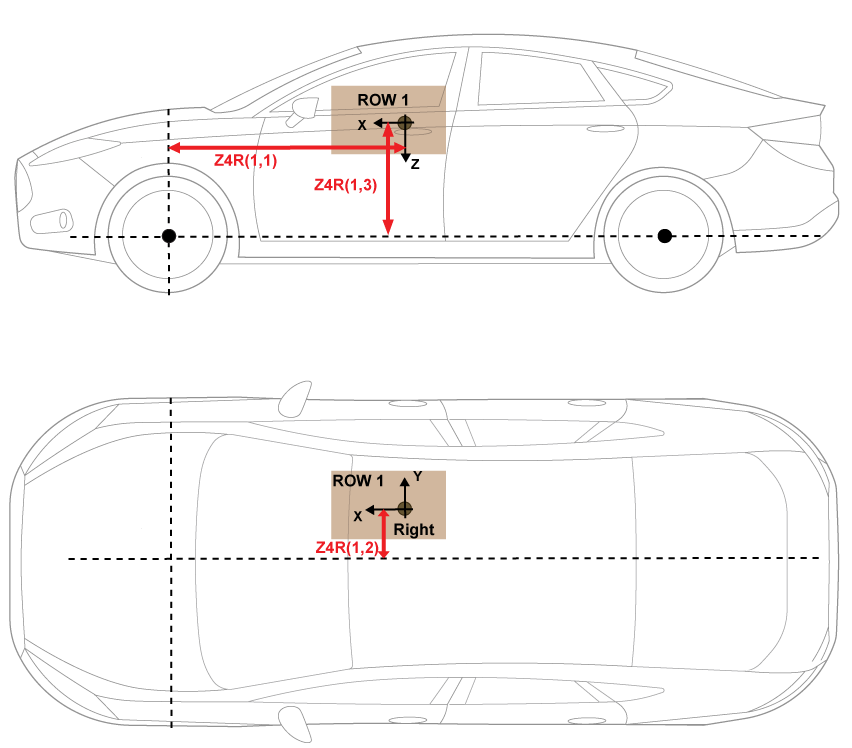
Строка 1, правая сторона | Distance vector from front axle, z4R |
|
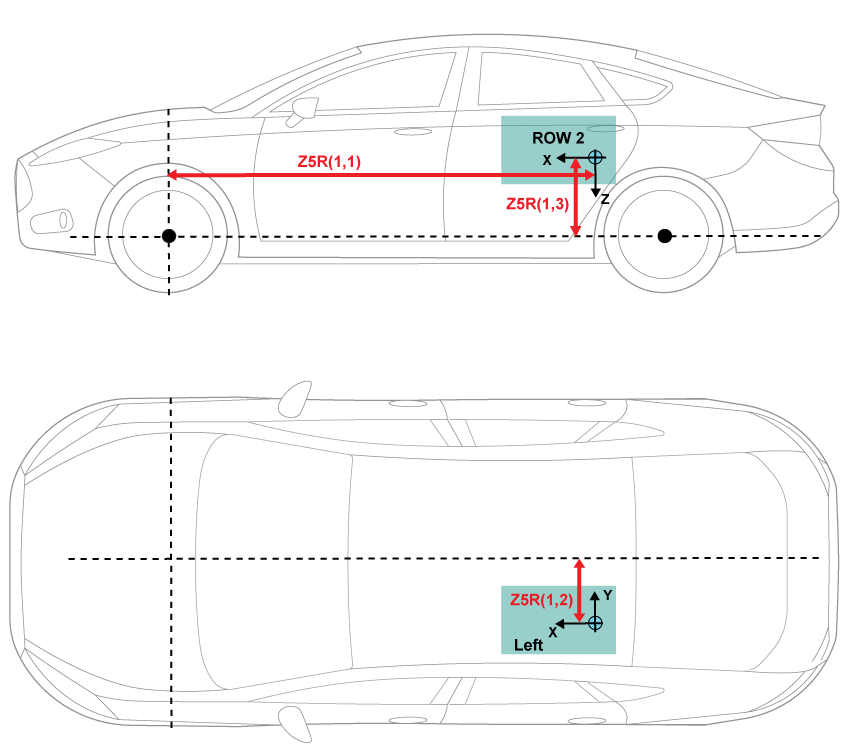
Строка 2, левая сторона | Distance vector from front axle, z5R |
|
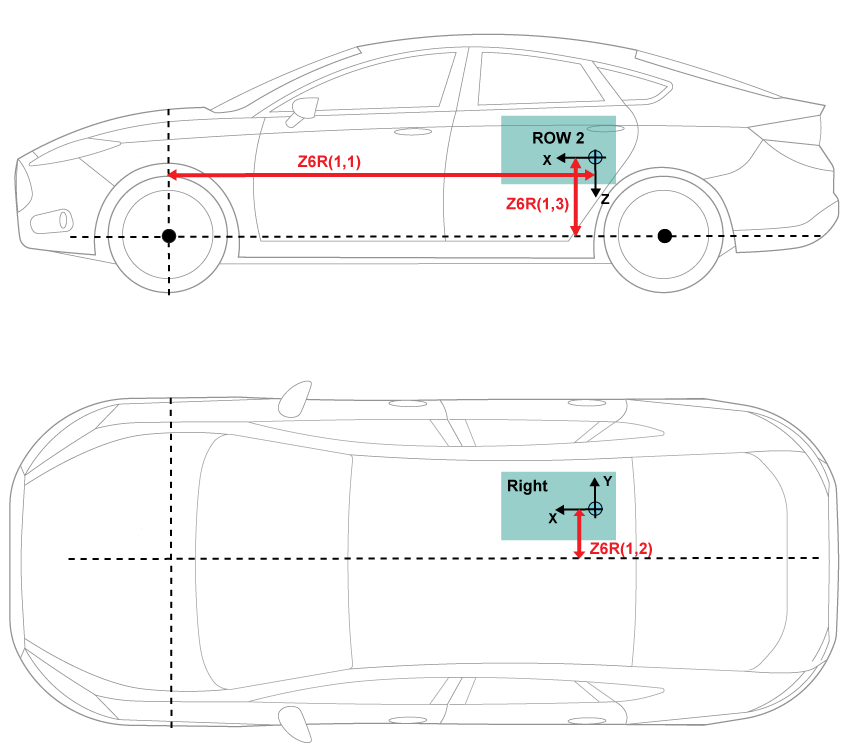
Строка 2, правая сторона | Distance vector from front axle, z6R |
|
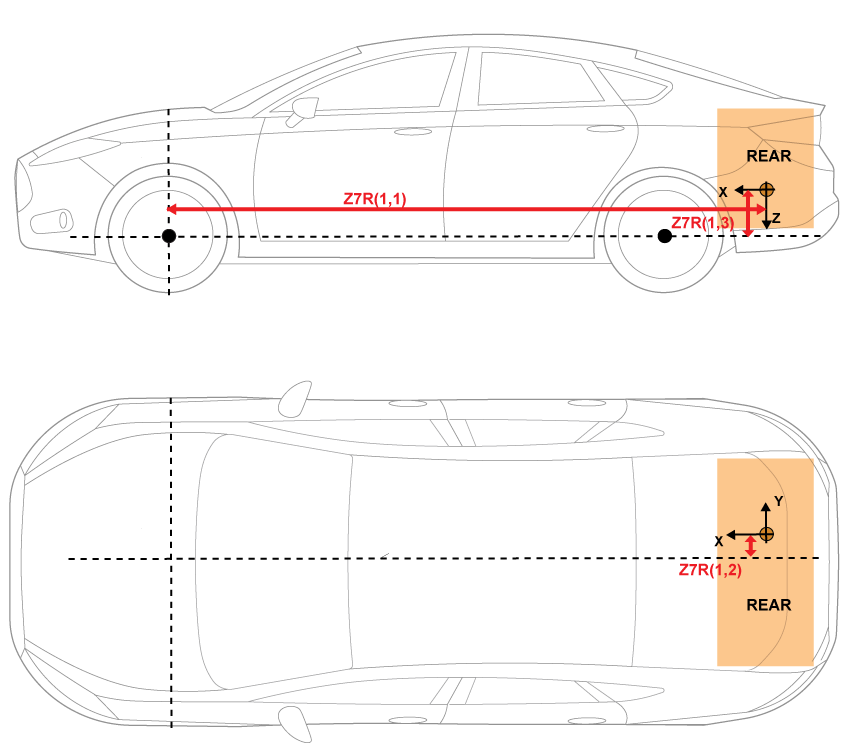
Задняя часть | Distance vector from front axle, z7R |
|
Чтобы определить движение автомобиля, блок реализует вычисления для динамики аппарата твердого тела, ветер перетаскивают, инерционные загрузки, и координируют преобразования. Зафиксированными телом и зафиксированным автомобилем являются те же системы координат.
Блок Vehicle Body 6DOF рассматривает вращение зафиксированного телом координатного кадра о плоском зафиксированном землей инерционном ссылочном кадре. Источник зафиксированного телом координатного кадра является центром тяжести автомобиля тела.
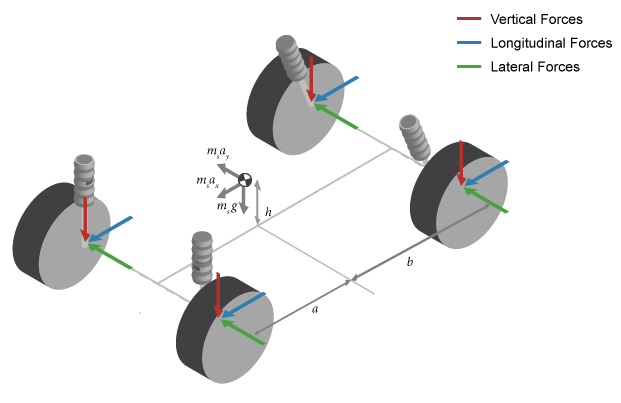
Блок использует это уравнение, чтобы вычислить переводное движение зафиксированного телом координатного кадра, где приложенные силы [Fx Fy Fz] T находятся в зафиксированном телом кадре, и масса тела, m, принята постоянная.
Определить отношение между зафиксированным телом угловым вектором скорости, [p q r] T, и скоростью изменения Углов Эйлера, , блок разрешает Эйлеровы уровни в зафиксированный телом кадр.
Инвертирование J дает необходимое отношение, чтобы определить Эйлеров вектор уровня.
Приложенные силы и моменты являются суммой перетаскивания, гравитационного, внешнего, и силы приостановки.
| Вычисление | Реализация |
|---|---|
Загрузите массы и инерцию | Блокируйтесь использование параллельно теореме оси, чтобы разрешить отдельные массы загрузки и инерцию с массой автомобиля и инерцию. |
Гравитационные силы, Fg | Блокируйте матрицу направляющего косинуса (DCM) использования, чтобы преобразовать гравитационный вектор в инерционно зафиксированный кадр к зафиксированному телом кадру. |
Сила сопротивления, Fd, и моменты, Md | Чтобы определить относительную скорость полета, блок вычитает скорость ветра из центра автомобиля массы (CM) скорость. Используя относительную скорость полета, блок определяет силу сопротивления. Используя относительную скорость полета, блок определяет моменты перетаскивания. |
Внешние силы, Fin, и моменты, Min | Внешние силы и моменты вводятся через порты |
Силы приостановки и моменты | Блок принимает, что силы приостановки и моменты действуют на эти hardpoint местоположения:
|
Уравнения используют эти переменные.
Смещение CM автомобиля, скорость и ускорение вдоль зафиксированной автомобилем оси X | |
Смещение CM автомобиля, скорость и ускорение вдоль зафиксированной автомобилем оси Y | |
Смещение CM автомобиля, скорость и ускорение вдоль зафиксированной автомобилем оси z | |
φ | Вращение зафиксированного автомобилем кадра о зафиксированной землей Оси X (список) |
θ | Вращение зафиксированного автомобилем кадра о зафиксированной землей Оси Y (подача) |
ψ | Вращение зафиксированного автомобилем кадра о зафиксированной землей оси Z (отклонение от курса) |
| FFLx, FFLy, FFLz | Силы приостановки обратились к передней стороне, оставленной hardpoint вдоль зафиксированного автомобилем x-, y-, и оси z |
| FFRx, FFRy, FFRz | Силы приостановки обратились к переднему праву hardpoint вдоль зафиксированного автомобилем x-, y-, и осей z |
| FRLx, FRLy, FRLz | Силы приостановки обратились к задней части, покинутой hardpoint вдоль зафиксированного автомобилем x-, y-, и оси z |
| FRRx, FRRy, FRRz | Силы приостановки обратились к заднему праву hardpoint вдоль зафиксированного автомобилем x-, y-, и осей z |
| MFx, FFy, FFz | Моменты приостановки применились к CM автомобиля о зафиксированном автомобилем x-, y-, и осям z |
| Fextx, Fexty, Fextz | Внешние силы обратились к CM автомобиля вдоль зафиксированного автомобилем x-, y-, и осям z |
| Fdx, Fdy, Fdz | Сила сопротивления применилась к CM автомобиля вдоль зафиксированного автомобилем x-, y-, и осям z |
| Mextx, Mexty, Mextz | Внешний момент о CM автомобиля о зафиксированном автомобилем x-, y-, и оси z |
| Mdx, Mdy, Mdz | Перетащите момент о CM автомобиля о зафиксированном автомобилем x-, y-, и оси z |
| I | Моменты кузова инерции |
| a, B | Расстояние передних и задних колес, соответственно, от нормальной точки проекции CM автомобиля на общую плоскость оси |
| h | Высота CM автомобиля выше плоскости оси |
| wF, wR | Передние и задние ширины дорожки |
| γ | Дорожный угол класса |
| Cd | Коэффициент аэродинамического сопротивления, действующий вдоль зафиксированной автомобилем оси X |
| Cs | Коэффициент аэродинамического сопротивления, действующий вдоль зафиксированной автомобилем оси Y |
| Cl | Коэффициент аэродинамического сопротивления, действующий вдоль зафиксированной автомобилем оси z |
| Crm | Момент списка аэродинамического сопротивления, действуя о зафиксированной автомобилем оси X |
| Cpm | Момент подачи аэродинамического сопротивления, действуя о зафиксированной автомобилем оси Y |
| Cym | Момент отклонения от курса аэродинамического сопротивления, действуя о зафиксированной автомобилем оси z |
| Af | Лобная область |
| R | Атмосферная определенная газовая константа |
| T | Экологическая температура воздуха |
| Pabs | Экологическое абсолютное давление |
| wx, wy, wz | Скорость ветра вдоль зафиксированного автомобилем x-, y-, и оси z |
| Wx, Wy, Wz | Скорость ветра вдоль инерционного X-, Y-и осей Z |
Vehicle mass, m — МассаscalarМасса автомобиля, m, в kg.
Longitudinal distance from center of mass to front axle, a — РасстояниеscalarРасстояние от CM автомобиля до передней оси, a, в m.
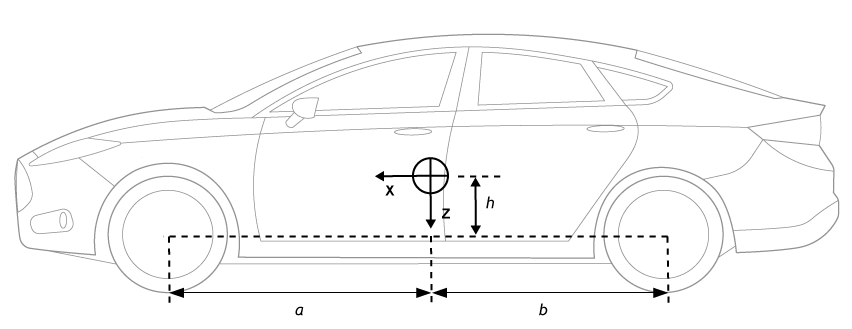
Longitudinal distance from center of mass to rear axle, b — РасстояниеscalarРасстояние от CM автомобиля до передней оси, b, в m.
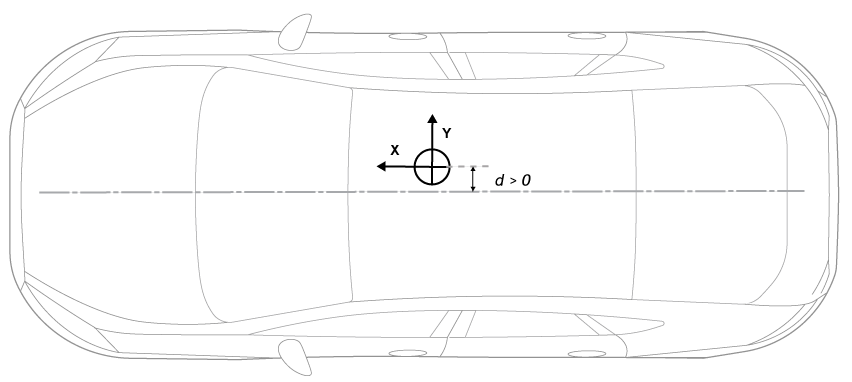
Lateral distance from geometric centerline to center of mass, d — РасстояниеscalarБоковое расстояние от геометрической средней линии до центра массы, d, в m, вдоль зафиксированного автомобилем y. Положительные значения указывают, что CM автомобиля справа от геометрической средней линии. Отрицательные величины указывают, что CM автомобиля слева от геометрической средней линии.
Vertical distance from center of mass to axle plane, h — РасстояниеscalarВертикальное расстояние от CM автомобиля до плоскости оси, h, в m.
Initial position in inertial frame [Xeo,Yeo,Zeo], Xe_o — ПоложениеvectorИсходное положение автомобиля в инерционном кадре, Xeo, в m.
Initial longitudinal velocity [xdot_o,ydot_o,zdot_o], xbdot_o — СкоростьvectorНачальная продольная скорость, в m/s.
Initial Euler orientation [roll, pitch, yaw], eul_o — ВращениеvectorОриентация угла Эйлера автомобиля, в раде.
Initial body rotation rates [p,q,r], p_o — Уровень вращенияvectorУровень вращения угла Эйлера, в rad/s.
Chassis inertia tensor, Iveh — ИнерцияarrayТензор инерции автомобиля, Iveh, в kg*m^2. Размерностями является [3-by-3].
Track widths [front,rear], w — ШириныvectorПередняя и задняя ширина дорожки, в m. Размерностями является [2-by-1].
Mass, z1m — МассаscalarМасса, z1m, в kg.
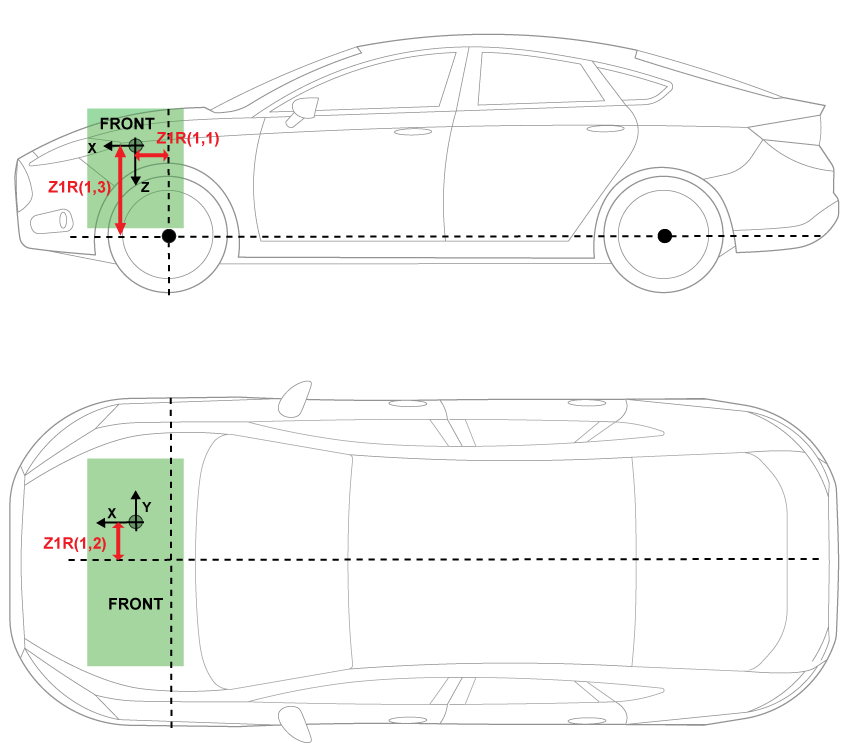
Distance vector from front axle, z1R — РасстояниеvectorВектор расстояния от передней оси, чтобы загрузить, z1R, в m. Размерностями является [1-by-3].
| Элемент массива | Описание |
|---|---|
z1R(1,1) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси X |
z1R(1,2) | Средняя линия автомобиля, чтобы загрузить, вдоль зафиксированной автомобилем оси Y |
z1R(1,3) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси z |
Например, эта таблица суммирует установки параметров, которые задают местоположение загрузки, обозначенное точками.
Местоположение в качестве примера | Знак |
|---|---|
|
|
Inertia tensor, z1I — ИнерцияarrayТензор инерции, z1I, в kg · m^2. Размерностями является [3-by-3].
Тензор использует систему координат с источником в CM загрузки.
ось X вдоль зафиксированной автомобилем оси X
ось Y вдоль зафиксированной автомобилем оси Y
ось z вдоль зафиксированной автомобилем оси z
Mass, z2m — МассаscalarМасса, z2m, в kg.
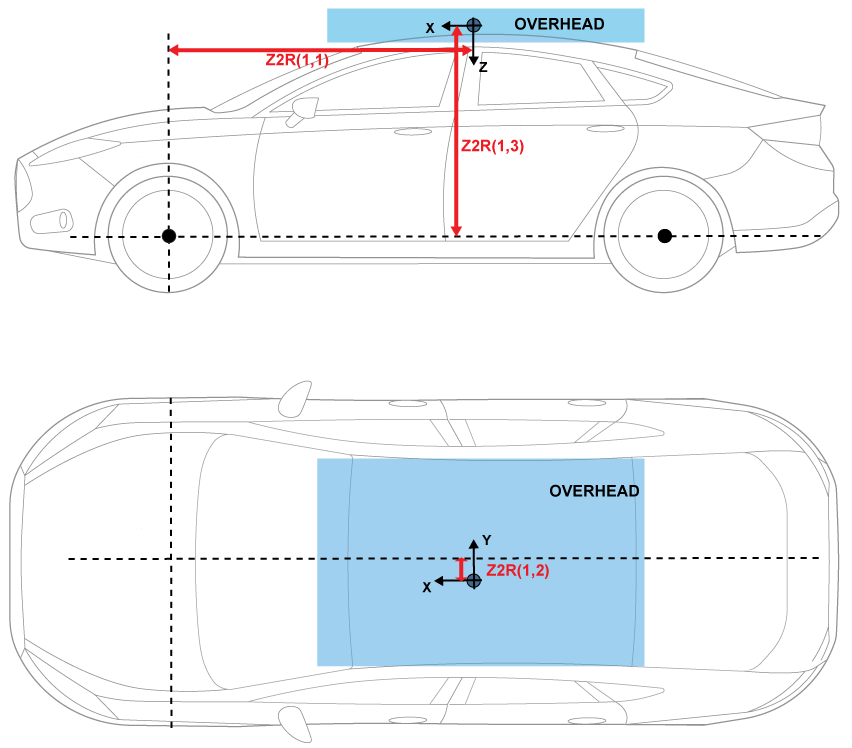
Distance vector from front axle, z2R — РасстояниеvectorВектор расстояния от передней оси, чтобы загрузить, z2R, в m. Размерностями является [1-by-3].
| Элемент массива | Описание |
|---|---|
z2R(1,1) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси X |
z2R(1,2) | Средняя линия автомобиля, чтобы загрузить, вдоль зафиксированной автомобилем оси Y |
z2R(1,3) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси z |
Например, эта таблица суммирует установки параметров, которые задают местоположение загрузки, обозначенное точкой.
Местоположение в качестве примера | Знак |
|---|---|
|
|
Inertia tensor, z2I — ИнерцияarrayТензор инерции, z2I, в kg · m^2. Размерностями является [3-by-3].
Тензор использует систему координат с источником в CM загрузки.
ось X вдоль зафиксированной автомобилем оси X
ось Y вдоль зафиксированной автомобилем оси Y
ось z вдоль зафиксированной автомобилем оси z
Mass, z3m — МассаscalarМасса, z3m, в kg.
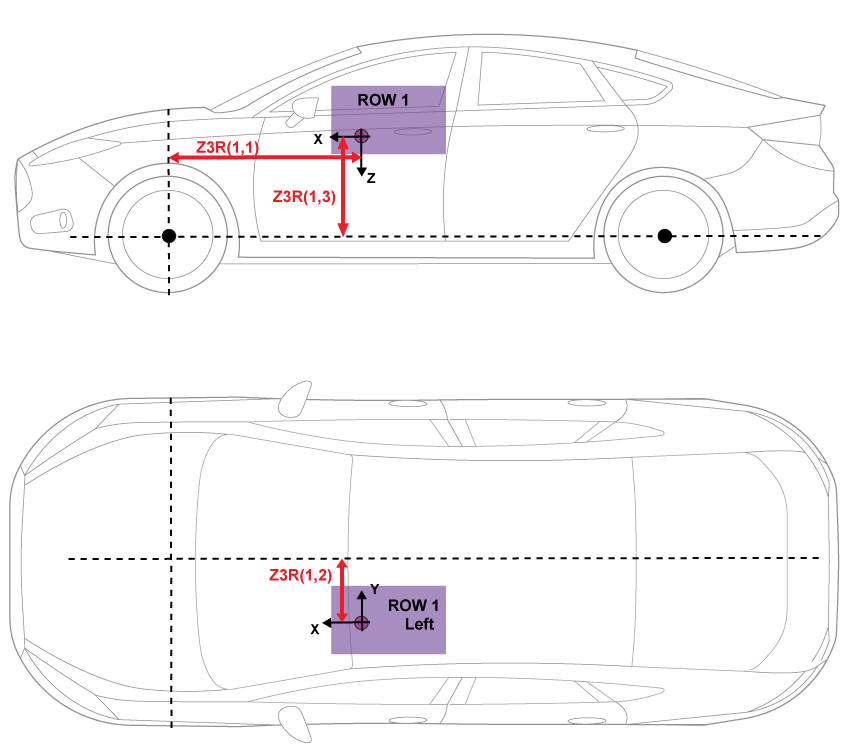
Distance vector from front axle, z3R — РасстояниеvectorВектор расстояния от передней оси, чтобы загрузить, z3R, в m. Размерностями является [1-by-3].
| Элемент массива | Описание |
|---|---|
z3R(1,1) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси X |
z3R(1,2) | Средняя линия автомобиля, чтобы загрузить, вдоль зафиксированной автомобилем оси Y |
z3R(1,3) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси z |
Например, эта таблица суммирует установки параметров, которые задают местоположение загрузки, обозначенное точкой.
Местоположение в качестве примера | Знак |
|---|---|
|
|
Inertia tensor, z3I — ИнерцияarrayТензор инерции, z3I, в kg · m^2. Размерностями является [3-by-3].
Тензор использует систему координат с источником в CM загрузки.
ось X вдоль зафиксированной автомобилем оси X
ось Y вдоль зафиксированной автомобилем оси Y
ось z вдоль зафиксированной автомобилем оси z
Mass, z4m — МассаscalarМасса, z4m, в kg.
Distance vector from front axle, z4R — РасстояниеvectorВектор расстояния от передней оси, чтобы загрузить, z4R, в m. Размерностями является [1-by-3].
| Элемент массива | Описание |
|---|---|
z4R(1,1) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси X |
z4R(1,2) | Средняя линия автомобиля, чтобы загрузить, вдоль зафиксированной автомобилем оси Y |
z4R(1,3) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси z |
Например, эта таблица суммирует установки параметров, которые задают местоположение загрузки, обозначенное точкой.
Местоположение в качестве примера | Знак |
|---|---|
|
|
Inertia tensor, z4I — ИнерцияarrayТензор инерции, z4I, в kg · m^2. Размерностями является [3-by-3].
Тензор использует систему координат с источником в CM загрузки.
ось X вдоль зафиксированной автомобилем оси X
ось Y вдоль зафиксированной автомобилем оси Y
ось z вдоль зафиксированной автомобилем оси z
Mass, z5m — МассаscalarМасса, z5m, в kg.
Distance vector from front axle, z5R — РасстояниеvectorВектор расстояния от передней оси, чтобы загрузить, z5R, в m. Размерностями является [1-by-3].
| Элемент массива | Описание |
|---|---|
z5R(1,1) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси X |
z5R(1,2) | Средняя линия автомобиля, чтобы загрузить, вдоль зафиксированной автомобилем оси Y |
z5R(1,3) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси z |
Например, эта таблица суммирует установки параметров, которые задают местоположение загрузки, обозначенное точкой.
Местоположение в качестве примера | Знак |
|---|---|
|
|
Inertia tensor, z5I — ИнерцияarrayТензор инерции, z5I, в kg · m^2. Размерностями является [3-by-3].
Тензор использует систему координат с источником в CM загрузки.
ось X вдоль зафиксированной автомобилем оси X
ось Y вдоль зафиксированной автомобилем оси Y
ось z вдоль зафиксированной автомобилем оси z
Mass, z6m — МассаscalarМасса, z6m, в kg.
Distance vector from front axle, z6R — РасстояниеvectorВектор расстояния от передней оси, чтобы загрузить, z6R, в m. Размерностями является [1-by-3].
| Элемент массива | Описание |
|---|---|
z6R(1,1) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси X |
z6R(1,2) | Средняя линия автомобиля, чтобы загрузить, вдоль зафиксированной автомобилем оси Y |
z6R(1,3) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси z |
Например, эта таблица суммирует установки параметров, которые задают местоположение загрузки, обозначенное точкой.
Местоположение в качестве примера | Знак |
|---|---|
|
|
Inertia tensor, z6I — ИнерцияarrayТензор инерции, z6I, в kg · m^2. Размерностями является [3-by-3].
Тензор использует систему координат с источником в CM загрузки.
ось X вдоль зафиксированной автомобилем оси X
ось Y вдоль зафиксированной автомобилем оси Y
ось z вдоль зафиксированной автомобилем оси z
Mass, z7m — МассаscalarМасса, z7m, в kg.
Distance vector from front axle, z7R — РасстояниеvectorВектор расстояния от передней оси, чтобы загрузить, z7R, в m. Размерностями является [1-by-3].
| Элемент массива | Описание |
|---|---|
z7R(1,1) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси X |
z7R(1,2) | Средняя линия автомобиля, чтобы загрузить, вдоль зафиксированной автомобилем оси Y |
z7R(1,3) | Передняя подвеска hardpoint, чтобы загрузить, вдоль зафиксированной автомобилем оси z |
Например, эта таблица суммирует установки параметров, которые задают местоположение загрузки, обозначенное точкой.
Местоположение в качестве примера | Знак |
|---|---|
|
|
Inertia tensor, z7I — ИнерцияarrayТензор инерции, z7I, в kg · m^2. Размерностями является [3-by-3].
Тензор использует систему координат с источником в CM загрузки.
ось X вдоль зафиксированной автомобилем оси X
ось Y вдоль зафиксированной автомобилем оси Y
ось z вдоль зафиксированной автомобилем оси z
Longitudinal drag area, Af — ОбластьscalarЭффективная площадь поперечного сечения автомобиля, Af, чтобы вычислить аэродинамическую силу сопротивления на автомобиль, в m^2.
Longitudinal drag coefficient, Cd — ПеретащитьscalarКоэффициент аэродинамического сопротивления, Cd, безразмерный.
Longitudinal lift coefficient, Cl — ЛифтscalarВоздушный коэффициент лифта, Cl, безразмерный.
Longitudinal drag pitch moment, Cpm — Сделайте подачу перетаскиваютscalarПродольный коэффициент момента подачи перетаскивания, Cpm, безразмерный.
Relative wind angle vector, beta_w — Угол ветраvectorОтносительный угловой вектор ветра, βw, в раде.
Side force coefficient vector, Cs — Сила стороны перетаскиваетvectorКоэффициент вектора коэффициентов силы стороны, Cs, безразмерный.
Yaw moment coefficient vector, Cym — Момент отклонения от курса перетаскиваетvectorКоэффициент вектора коэффициентов момента отклонения от курса, Cym, безразмерный.
Absolute air pressure, Pabs — ДавлениеscalarЭкологический воздух абсолютное давление, Pabs, в Pa.
Air temperature, Tair — Температура окружающего воздухаscalarТемпература окружающего воздуха, Tair, в K.
Чтобы включить этот параметр, очистите Air temperature.
Gravitational acceleration, g — Сила тяжестиscalarГравитационное ускорение, g, в m/s^2.
Longitudinal velocity tolerance, xdot_tol — ДопускscalarПродольный скоростной допуск, xdottol, в m/s.
Geometric longitudinal offset from axle plane, longOff — Продольное смещениеscalarСмещение шасси автомобиля от плоскости оси вдоль зафиксированной телом оси X, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG автомобиля.
Geometric lateral offset from center plane, latOff — Боковое смещениеscalarСмещение шасси автомобиля от центральной плоскости вдоль зафиксированной телом оси Y, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG автомобиля.
Geometric vertical offset from axle plane, vertOff — Вертикальное смещениеscalarСмещение шасси автомобиля от плоскости оси вдоль зафиксированной телом оси z, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG автомобиля.
Wrap Euler angles, wrapAng — Выборon (значение по умолчанию) | offПеренесите Углы Эйлера к интервалу [-pi, pi]. Для маневров автомобиля, которые могут подвергнуться вращениям отклонения от курса автомобиля, которые являются за пределами интервала, рассмотрите отмену выбора параметра, если вы хотите:
Отследите общее вращение отклонения от курса автомобиля.
Избегайте разрывов в средствах оценки состояния автомобиля.
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения (SAE), 1992.
6DOF (Углы Эйлера) | Векторная конкатенация, матричная конкатенация | Кузов 3DOF
