Вставьте луч от лазерного наблюдения сканирования
insertRay( вставляет одно или несколько наблюдений датчика сканирования лидара в сетку заполнения, map,pose,scan,maxrange)map, использование входа lidarScan объект, scan, получить конечные точки луча. Конечные точки луча рассматриваются свободным пространством, если входные области значений сканирования ниже maxrange. Ячейки, наблюдаемые, как занято, обновляются с наблюдением за 0,7. Все другие точки вдоль луча обработаны как препятствие, свободное и обновленное с наблюдением за 0,4. Конечные точки выше maxrange не обновляются. NaN значения проигнорированы. Это поведение коррелирует к обратной модели датчика.
insertRay(___, вставляет лучи с обновленными вероятностями, данными в двухэлементном векторе, invModel)invModel, это соответствует и занятым наблюдениям без препятствий. Используйте любой из предыдущих синтаксисов, чтобы ввести лучи.
Создайте пустую карту сетки заполнения.
map = occupancyMap(10,10,20);
Введите положение транспортного средства, областей значений, углов и максимальной области значений лазерного сканирования.
pose = [5,5,0]; ranges = 3*ones(100,1); angles = linspace(-pi/2,pi/2,100); maxrange = 20;
Создайте lidarScan объект с заданными областями и углами.
scan = lidarScan(ranges,angles);
Вставьте лазерные данные сканирования в карту заполнения.
insertRay(map,pose,scan,maxrange);
Покажите карту, чтобы видеть результаты вставки лазерного сканирования.
show(map)

Проверяйте заполнение пятна непосредственно перед транспортным средством.
getOccupancy(map,[8 5])
ans = 0.7000
Добавьте второе чтение и просмотрите обновление значений заполнения. Дополнительное чтение увеличивает уверенность в показаниях. Свободные и занятые значения становятся более отличными.
insertRay(map,pose,scan,maxrange); show(map)

getOccupancy(map,[8 5])
ans = 0.8448
inverse sensor model определяет, как значения установлены вдоль луча от датчика области значений, читающего в препятствия в карте. Можно настроить эту модель путем определения различных вероятностей для свободных и занятых местоположений в invModel аргумент. NaN значения области значений проигнорированы. Значения области значений, больше, чем maxrange не обновляются.
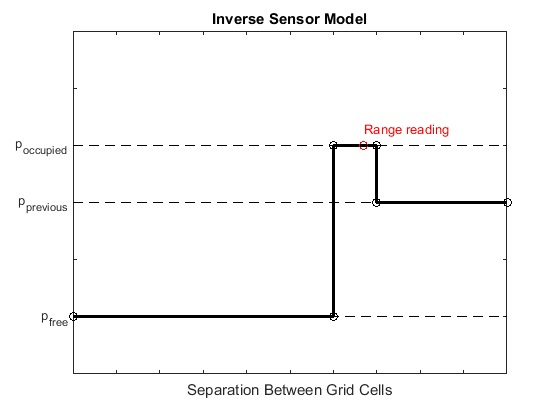
Местоположения сетки, которые содержат показания области значений, обновляются с занятой вероятностью. Местоположения перед чтением обновляются со свободной вероятностью. Все местоположения после чтения не обновляются.
