Цель в этой проблеме состоит в том, чтобы минимизировать нелинейную функцию
таким образом, что-10.0 ≤ xi ≤ 10.0, где n 800 (n должен быть кратным 4), p = 7/3, и x 0 = x n + 1 = 0.
tbroyfg.m файл вычисляет значение функции и градиент. Этот файл длинен и не включен здесь. Вы видите код для этой функции с помощью команды
type tbroyfg
Шаблон разреженности матрицы Гессиана был предопределен и сохранен в файле tbroyhstr.mat. Структура разреженности для Гессиана этой проблемы соединена, как вы видите в следующем spy график.
load tbroyhstr spy(Hstr)
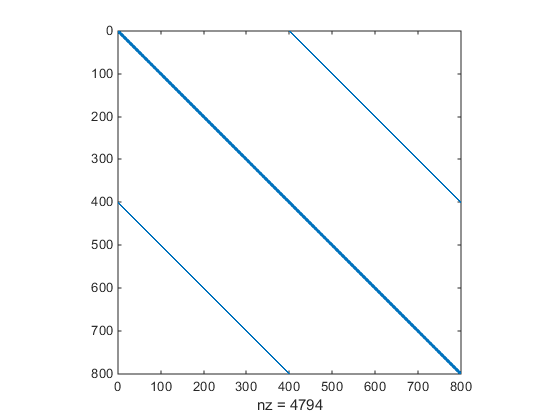
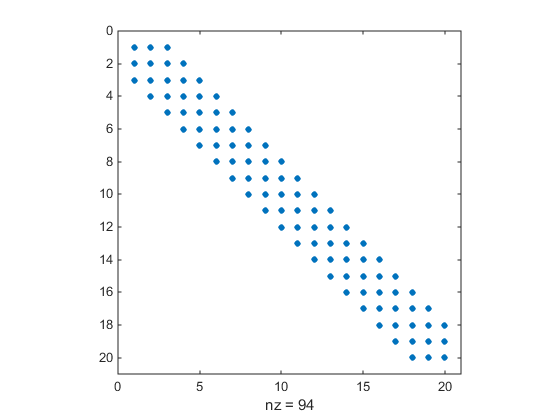
В этом графике центральная дорожка является самостоятельно пятью ленточными матрицами. Следующий график показывает матрицу более ясно:
spy(Hstr(1:20,1:20))
Используйте optimoptions установить HessPattern параметр к Hstr. Когда проблема, столь большая, как это имеет очевидную структуру разреженности, не устанавливая HessPattern параметр требует огромной суммы ненужной памяти и расчета. Это вызвано тем, что fmincon попытки использовать конечное дифференцирование на полной матрице Гессиана 640 000 ненулевых записей.
Необходимо также установить SpecifyObjectiveGradient параметр к true использование optimoptions, поскольку градиент вычисляется в tbroyfg.m. Затем выполните fmincon как показано на Шаге 2.
fun = @tbroyfg;
load tbroyhstr % Get Hstr, structure of the Hessian
n = 800;
xstart = -ones(n,1); xstart(2:2:n) = 1;
lb = -10*ones(n,1); ub = -lb;
options = optimoptions('fmincon','SpecifyObjectiveGradient',true,'HessPattern',Hstr,...
'Algorithm','trust-region-reflective');
[x,fval,exitflag,output] = ...
fmincon(fun,xstart,[],[],[],[],lb,ub,[],options);exitflagfval , мера по оптимальности первого порядка (output.firstorderopt), и количество итераций (output.iterations):
exitflag,fval,output.firstorderopt,output.iterations
exitflag =
3
fval =
270.4790
ans =
0.0163
ans =
7Для связанных ограниченных проблем оптимальность первого порядка является нормой по бесконечности v.*g, где v задан как в Ограничениях Поля и g градиент.
Из-за центральной дорожки с пятью полосами можно улучшить решение при помощи предварительного формирователя с пятью полосами вместо диагонального предварительного формирователя по умолчанию. Используя optimoptions функция, сброс PrecondBandWidth параметр к 2 и решите задачу снова. (Пропускная способность является количеством верхних (или ниже) диагонали, не считая основную диагональ.)
fun = @tbroyfg;
load tbroyhstr % Get Hstr, structure of the Hessian
n = 800;
xstart = -ones(n,1); xstart(2:2:n,1) = 1;
lb = -10*ones(n,1); ub = -lb;
options = optimoptions('fmincon','SpecifyObjectiveGradient',true,'HessPattern',Hstr, ...
'Algorithm','trust-region-reflective','PrecondBandWidth',2);
[x,fval,exitflag,output] = ...
fmincon(fun,xstart,[],[],[],[],lb,ub,[],options); Количество итераций увеличивается на два. Но мера по оптимальности первого порядка уменьшается фактором 1e-3:
exitflag,fval,output.firstorderopt,output.iterations
exitflag =
3
fval =
270.4790
ans =
7.5340e-05
ans =
9