Преобразуйте диаграмму направленности от формы phi/theta до формы you/v
pat_uv = phitheta2uvpat(pat_phitheta,phi,theta)pat_phitheta в u/v пространственных координатах вместо φ/θ угловых координат. pat_phitheta производит шаблон под φ углами в phi и углы θ в theta. pat_uv матрица использует сетку по умолчанию, которая покрывает значения u от –1 до 1 и значения v от –1 до 1. В этой сетке, pat_uv однородно производится с размером шага 0,01 для u и v. Функция интерполирует, чтобы оценить ответ антенны в данном направлении. Значения в pat_uv NaN для u и значений v вне модульного круга, потому что u и v не определены вне модульного круга.
Преобразуйте диаграмму направленности в форму u-v с u и координатами v, расположенными с интервалами 0,01.
Задайте шаблон в терминах φ и θ.
phi = 0:360; theta = 0:90; pat_phitheta = mag2db(repmat(cosd(theta)',1,numel(phi)));
Преобразуйте шаблон в форму u-v.
pat_uv = phitheta2uvpat(pat_phitheta,phi,theta);
Преобразуйте диаграмму направленности в координаты, с и координаты расположены с интервалами 0,01.
Задайте шаблон в терминах и .
phi = 0:360; theta = 0:90; pat_phitheta = mag2db(repmat(cosd(theta)',1,numel(phi)));
Преобразуйте шаблон в координаты. Сохраните и координаты для использования в графическом выводе.
[pat_uv,u,v] = phitheta2uvpat(pat_phitheta,phi,theta);
Постройте результат.
H = surf(u,v,pat_uv); H.LineStyle = 'none'; xlabel('u'); ylabel('v'); zlabel('Pattern');

Преобразуйте диаграмму направленности в координаты, с и координаты расположены с интервалами 0,05.
Задайте шаблон в терминах и .
phi = 0:360; theta = 0:90; pat_phitheta = mag2db(repmat(cosd(theta)',1,numel(phi)));
Задайте набор и координаты, в которых можно произвести шаблон. Затем преобразуйте шаблон.
u = -1:0.05:1; v = -1:0.05:1; pat_uv = phitheta2uvpat(pat_phitheta,phi,theta,u,v);
Постройте результат.
H = surf(u,v,pat_uv); H.LineStyle = 'none'; xlabel('u'); ylabel('v'); zlabel('Pattern');

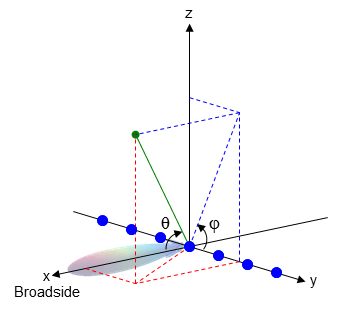
φ угол является углом от положительного y - оси к положительному z - ось к ортогональной проекции вектора на плоскость yz. φ угол между 0 и 360 градусами. θ угол является углом от x - ось к плоскости yz к самому вектору. θ угол между 0 и 180 градусами.
Фигура иллюстрирует φ и θ для вектора, который появляется как зеленая сплошная линия. Система координат относительно центра универсальной линейной матрицы, элементы которой появляются как синие круги.
Координатные преобразования между φ/θ и az/el описаны следующими уравнениями
phased.CustomAntennaElement | phitheta2uv | uv2phitheta | uv2phithetapat
