Flexible Shaft
Вал с крутильной и изгибающейся податливостью
Описание
Блок Flexible Shaft представляет вал автомобильной трансмиссии с крутильной и изгибающейся податливостью. Вал состоит из гибкого материала, который скручивает в ответ на прикладной крутящий момент и повороты в ответ на статический массовый дисбаланс. Действие скручивания задерживает механическую передачу между концами вала, изменяя динамический ответ системы автомобильной трансмиссии.
Чтобы представлять гибкий вал скрученности, блок использует смешанный массовый метод. Эта модель делит вал на различные элементы, которые соединяют через параллельные пружинные системы демпфера. Элементы обеспечивают инерцию вала, в то время как пружинные системы демпфера обеспечивают податливость вала.
Блок предоставляет четыре метода параметризации, которые позволяют вам податливости модели или в гомогенном или в по оси неоднородном вале. По оси неоднородный вал один, для которого любой из этих атрибутов варьируется вдоль вала:
Крутильная жесткость
Крутильная инерция
Изгиб жесткости
Плотность
Сдвиньте модуль
Модуль молодежи
Наружный диаметр
Внутренний диаметр
Дополнительный параметр позволяет вам смоделировать потери мощности в подшипниках из-за вязкого трения в концах вала. Для получения дополнительной информации см. Модель Скрученности.
Примечание
Вязкое трение в концах вала отличается от внутреннего существенного затухания, которое соответствует потерям, возникающим в самом материале вала.
Чтобы представлять гибкий вал изгиба, блок использует или смешанный массовый метод или eigenmodes метод. В то время как смешанный массовый метод более прост сконфигурировать, eigenmodes метод имеет тенденцию симулировать быстрее.
Совет
Если скорость симуляции, высокий приоритет, сначала симулируйте использование смешанного массового метода, настроив параметры по мере необходимости, пока результаты не совпадают с вашими математическими моделями или экспериментальными данными. Затем симулируйте использование eigenmodes метода. Снова, настройте параметры по мере необходимости до математических моделей результатов или экспериментальных данных. Для примера, который использует оба метода, смотрите Вал с Крутильной и Поперечной Гибкостью.
Для смешанного массового метода количество изгибающихся элементов вала совпадает с количеством элементов вала скрученности. Модель делит вал на серию таких элементов. Элементы обеспечивают инерцию вала, в то время как матрицы жесткости обеспечивают податливость вала. eigenmodes метод вычисляет эффективные системы массового пружинного демпфера, которые представляют изгибающиеся режимы вала. Можно задать количество режимов, чтобы включать и точность форм режима. И смешанная масса и eigenmodes методы позволяют вам модели:
Excitational статические дисбалансы
Концентрически присоединенные твердые массы
До четырех мест поддержки вдоль вала
Линейное затухание, пропорциональное инерции вала
Линейное затухание, пропорциональное жесткости вала
Примечание
eigenmodes метод принимает, что затухание поддержки легко сравненный с жесткостью поддержки.
Статические дисбалансы, которые волнуют изгиб, происходят, когда центр массы вала или присоединенной твердой массы не выравнивается с осью принципала вала. Можно варьироваться местоположения, величины и угловые смещения статических дисбалансов на вале.
Можно представлять концентрически присоединенные твердые массы как диски или идеализированные массы точки. Концентрический диск добавляет диаметральные и полярные моменты инерции к валу и массы к степени свободы перевода узлов вала. В модели принимается, что диск является тонким, таким образом, вал может все еще изогнуться по обе стороны от осевого местоположения с диском. Полярный момент инерции связывает две плоскости изгиба. Концентрическая масса точки является идеализированной версией концентрического диска. Концентрическая масса точки добавляет массу в степени свободы перевода узлов вала, но не имеет вращательных моментов инерции. Можно варьироваться местоположения и инерция концентрических дисков или указать массы, которые присоединены к валу.
Можно смоделировать поддержки как идеал или при помощи матриц затухания и жесткости. Для каждой поддержки можно варьироваться:
Местоположение Любая точка вдоль длины вала.
Введите — Идеальный зажим, идеальный контакт, свободная, постоянная жесткость подшипника и затухание, или зависимая скоростью жесткость и затухание.
Номер — Два, три, или четыре.
И для изгибающихся методов, можно задать податливость изгиба вала или при помощи изгиба жесткости и для линейной массовой плотности или модуля Янга и диаметра вала.
Можно параметризовать крутильную модель или при помощи жесткости k и инерция J или при помощи размерностей и свойств материала вала.
Модель скрученности
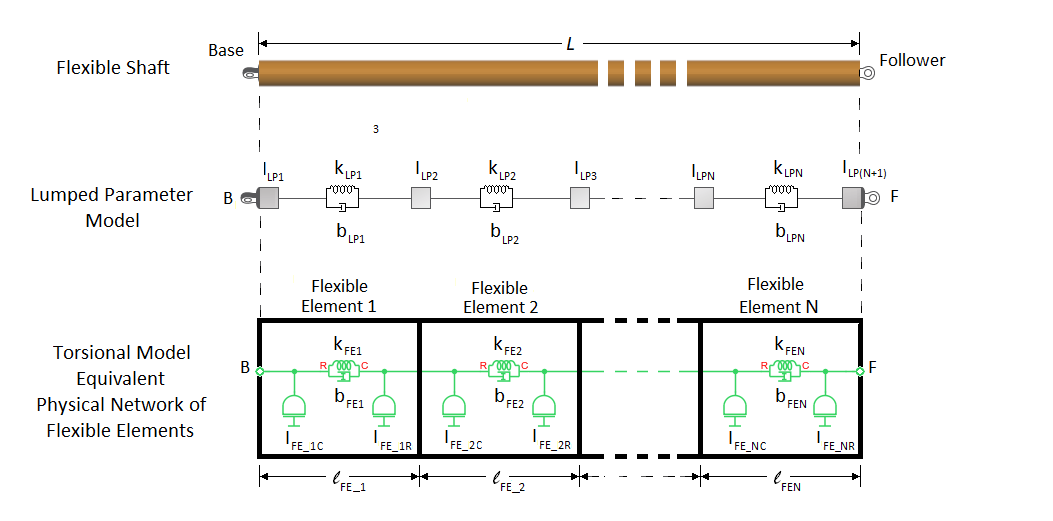
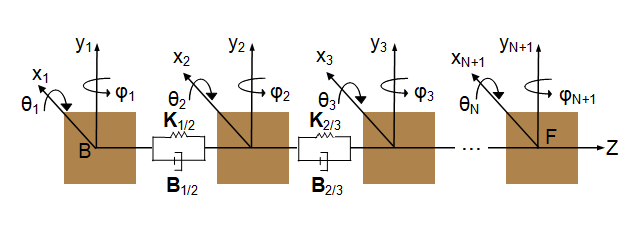
Для модели скрученности блок Flexible Shaft аппроксимирует распределенные, непрерывные свойства вала при помощи смешанного массового метода. Модель содержит конечное число, N, смешанных ослабленных инерцией пружинных элементов последовательно, плюс итоговая инерция. Результатом является серия инерция, соединенная N вращательные пружины и N вращательные демпферы.
Блок моделирует вал как эквивалентную физическую сеть N гибкие элементы. Каждый гибкий элемент, FEi, представляет короткий раздел карданного вала и содержит:
Однажды пружиной, kFE_i, для крутильной податливости. Сеть имеет в общей сложности пружины N.
Один демпфер, bFE_i, для существенного затухания. Сеть имеет в общей сложности демпферы N.
Две инерции, IFE_iC и IFE_iR, для вращательного сопротивления. Инерция соседних гибких элементов консолидируется вместе так, чтобы сеть имела в общей сложности инерция.
Для по оси гомогенного вала гибкие длины элемента, податливость, затухание и распределенная инерция в физической сети равны, таковы что:
Для по оси неоднородного вала, суммы податливости, затухания, и R - узла и C - инерция узла может отличаться для отдельных гибких элементов по модели физической сети.
Алгоритм размещения узла
Баланс между точностью модели и скоростью симуляции зависит от N, количества гибких элементов что использование блока, чтобы представлять вал. Для получения информации о балансирующейся скорости симуляции и точности модели, смотрите, Улучшают Скорость симуляции или Точность.
Блок позволяет вам задавать минимальное количество гибких элементов, Nmin, как значение для Минимального количества гибкого параметра элементов. Однако количество гибких элементов, которые на самом деле использует блок, зависит от сложности вала, который это моделирует. Если блок требует более гибких элементов, чем вы задаете, чтобы решить модель, которая содержит осевую неоднородность, промежуточные поддержки, концентрические диски или массы или статические дисбалансы, то .
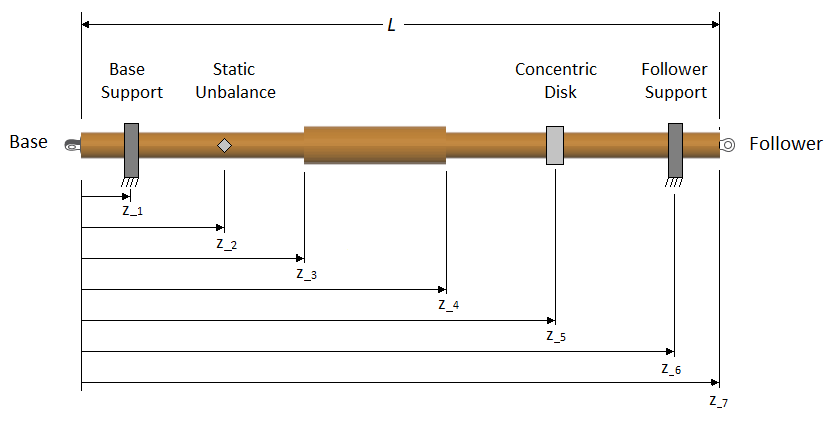
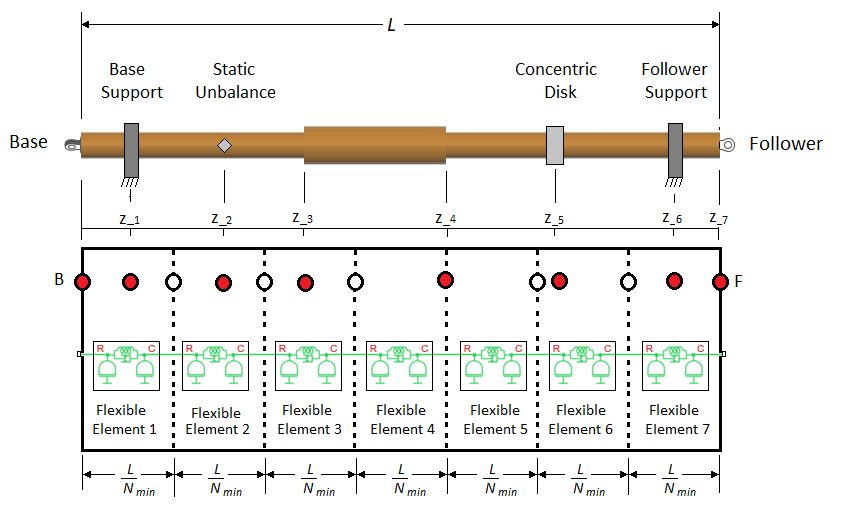
Например, предположите, что для комплексного вала в схеме вы задаете осевые местоположения для поддержек, статического дисбаланса, большего раздела диаметра и концентрического диска. Вы устанавливаете параметр для Nmin к 7.
Если изгиб модели включен, модель скрученности, гибкие местоположения элемента составляют местоположения статических дисбалансов и концентрических твердых масс, так, чтобы скрученность гибкие элементы выровнялась с изгибающимися гибкими элементами. В процессе моделирования модель скрученности независима от любых статических дисбалансов или концентрических твердых масс.
Алгоритм для блока определяет количество гибких элементов и длину отдельных элементов, которые требуются, чтобы решать симуляцию:
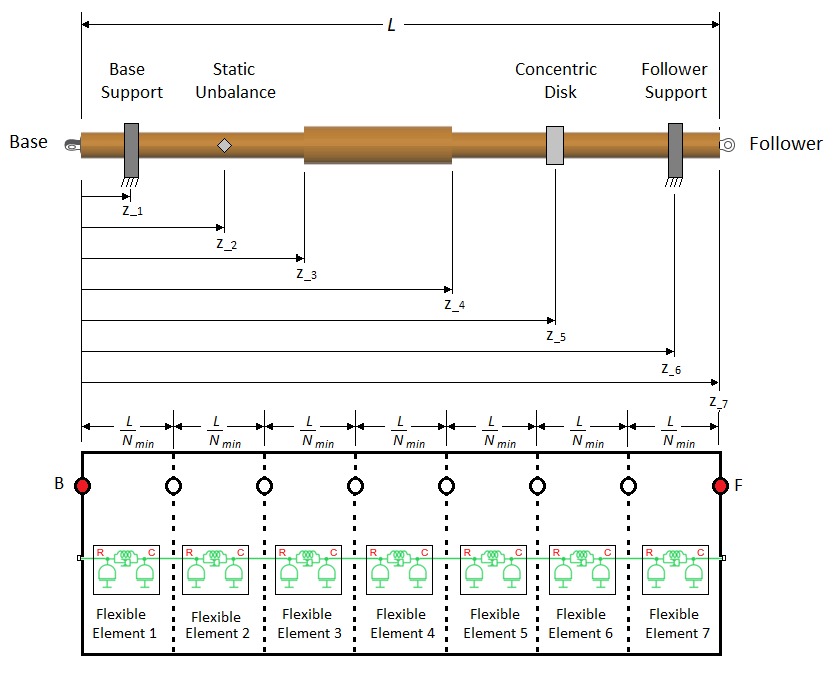
Блок помещает один узел в основе и концах последователя вала. Эти узлы рассматриваются фиксированными в осевом месте, потому что они представляют физические объекты вдоль оси вала. В схеме зафиксированные узлы отображают красным. Блок равномерно распределяет другие пять (Nmin-2) внутренние узлы вдоль вала. Это затем помещает гибкий элемент между каждой последовательной парой узлов.
Для поддержанного концом, по оси однородного вала, без статических дисбалансов или присоединенных концентрических дисков, в зависимости от других опций параметра и значений, которые вы задаете, блок может смочь решить симуляцию с помощью только Nmin гибкие элементы эквивалентных длин:
В большинстве случаев, однако, блок может только решить симуляцию, если это добавляет более гибкие элементы.
Чтобы добавить более гибкие элементы, места блока зафиксировали внутренние узлы в этих местоположениях:
Каждое местоположение поддержки вала. Блок позволяет вам задавать номер и местоположение поддержек вала. Для вала в схеме существуют поддержки в z1 и z6.
Каждый статический дисбаланс. Для вала в схеме существует статический дисбаланс в z2.
Каждая твердая масса. Твердые массы являются концентрически присоединенными дисками или массами точки. Для вала в схеме существует твердая масса, представленная как диск, в z5.
Каждый узел сегментов параметризации. Контуры параметризации являются местоположениями вдоль по оси неоднородного вала, где два соседних раздела вала варьируются по жесткости, инерции или геометрии. Блок позволяет вам задавать местоположения узла сегментов параметризации. Для вала в схеме существуют узлы сегментов в z3 и z4.
Обратите внимание на то, что блок не добавил узел в z4, потому что узел был уже добавлен на предыдущем шаге алгоритма. Однако узел теперь фиксируется, потому что он представляет физический объект вдоль длины вала.
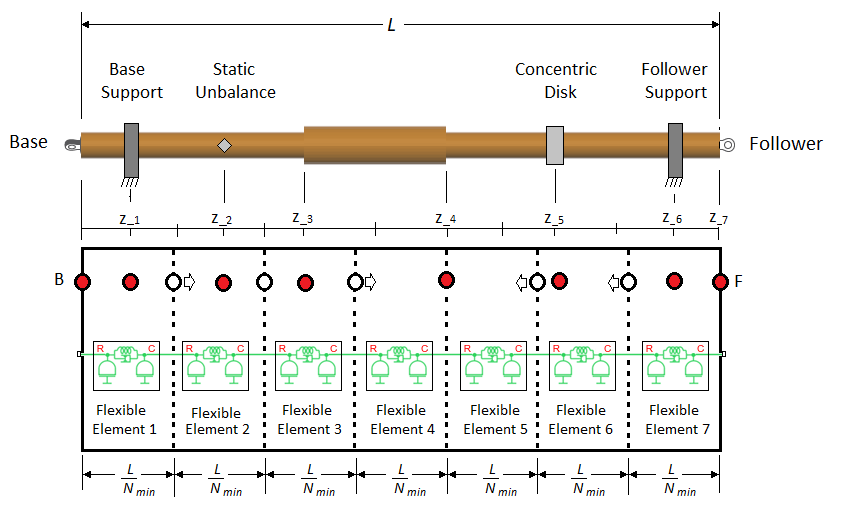
Блок настраивает нефиксированные местоположения узла между фиксированными узлами так, чтобы они были равномерно распределены.
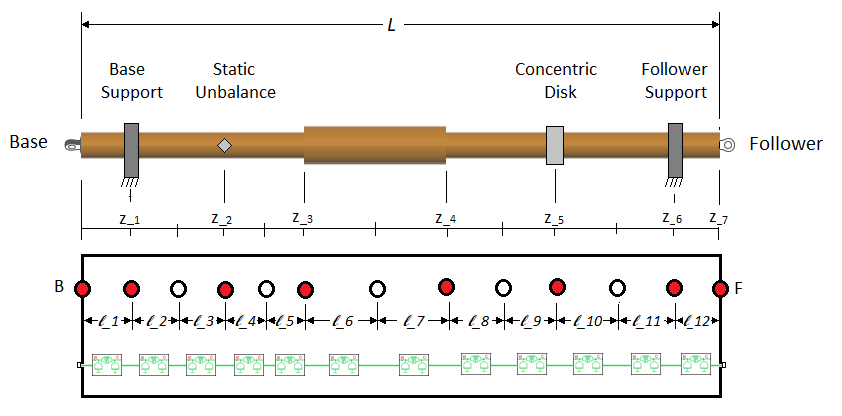
Наконец, блок помещает гибкие элементы между каждым узлом. Длина каждого гибкого элемента соответствует центру к расстояниям между центрами между соседними узлами. Блок распределяет инерцию среди гибких элементов на основе длины отдельного элемента и соответствующей геометрии вала. В конечном счете этот комплексный вал представлен 12 гибкими элементами, с , , , , , , и .
Если Nmin является достаточно большим, чтобы дать ко многим незакрепленным узлам, который больше количества фиксированных узлов, блок распределяет больше чем один незакрепленный узел между каждым набором соседних фиксированных узлов.
Размерности и свойства материала
Можно параметризовать модель скрученности или при помощи жесткости, k, и полярный момент инерции, J, или при помощи размерностей и свойств материала вала.
Жесткость и инерция для каждого элемента вычисляются из размерностей вала и свойств материала как:
где:
JP является полярным моментом инерции вала в гибком местоположении элемента.
D является наружным диаметром вала в гибком местоположении элемента.
d является внутренним диаметром вала в гибком местоположении элемента. Для твердого вала, . Для кольцевого вала, .
гибкая длина элемента.
m является массой вала в гибком местоположении элемента.
J является моментом инерции вала в гибком местоположении элемента.
ρ является плотностью материала вала.
G является модулем сдвига эластичности материала вала.
k является вращательной жесткостью гибкого элемента.
Внутреннее существенное затухание
Для любой крутильной параметризации внутреннее существенное затухание задано коэффициентом затухания, c, для одно-гибкой модели элемента с эквивалентной крутильной жесткостью и инерцией. Крутящий момент затухания затем , в то время как незатухающая собственная частота . Затухание, примененное через отдельный гибкий элемент смешанной массовой модели, равно продукту коэффициента затухания и относительной вращательной скорости того гибкого элемента.
Изгиб моделей
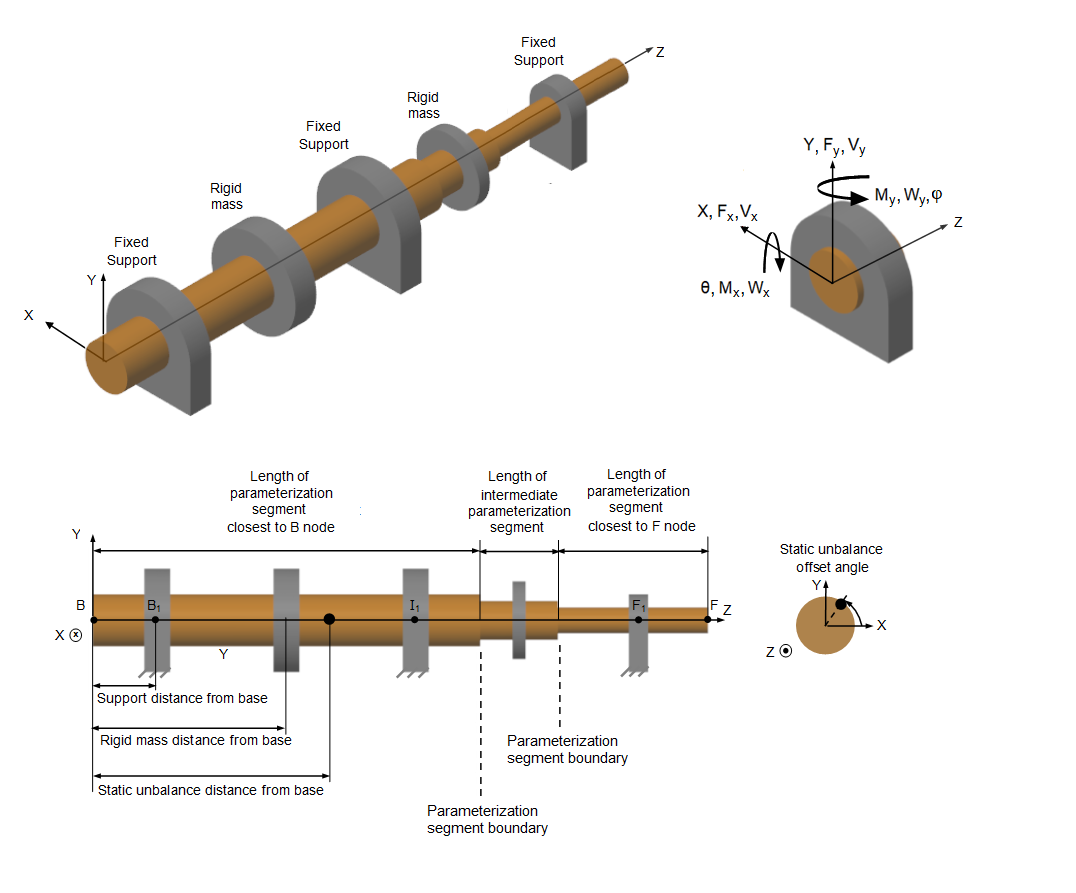
Геометрия Вала, Загрузка Поддержки и фигура Движения показывают, как измериться:
Статический дисбаланс возместил угол, который является углом статического дисбаланса об оси вала относительно оси x
Расстояния поддержки, твердой массы и статического дисбаланса, относительно основного конца вала, B
Параметризация длин сегмента
В фигуре вал имеет три фиксированных поддержки:
B1 — Основывайте поддержку конца
I1 — Промежуточная поддержка
F1 — Поддержка конца последователя
Вал имеет поступательную скорость V, вращательная скорость W, и порождает силы F, и моменты M, на поддержках. Кривые стрелки и соглашения знака следуют за правилом правой руки. Знаки физических сигналов, что блок выходные параметры соответствует стрелам, которые представляют силы, моменты и скорости вала, действующего на поддержки.
Векторные сигналы:
Сила,
Момент,
Поступательная скорость,
Вращательная скорость,
Если вал имеет две поддержки, каждый векторный сигнал имеет длину четыре. Обеспечьте, например, затем .
Если вал имеет четыре поддержки, каждый векторный сигнал имеет длину восемь. Обеспечьте, например, затем .
Изгиб смешанного массового метода модели
Как модель скрученности, смешанный массовый метод для изгибающейся модели дискретизирует распределенные, непрерывные свойства вала в конечное число, N, гибких элементов. N гибкие элементы соответствует смешанная инерция, соединенная последовательно путем затухания и пружинные элементы. Однако для изгибающейся модели, каждая масса имеет четыре степени свободы: перевод и вращение и в x и в перпендикуляре направлений y к оси вала.
Смешанное массовое уравнение движения [1]
где:
M матрица, которая представляет массу вала.
B матрица для внутреннего затухания и затухания поддержки.
GDisk матрица, которая составляет диск gyroscopics
Ω вал крутильная скорость в процессе моделирования.
K матрица для пружинной жесткости.
вектор, который представляет степени свободы для всех узлов.
вектор, который представляет внешние силы из-за приложения статического массового дисбаланса.
Уравнение для большой матрицы [4]
где:
большая матрица для отдельного гибкого элемента. Для каждого гибкого элемента, половины массы и момент инерции передается узлам в обоих концах гибкого элемента. матрица имеет ненулевые элементы в строки и столбцы:
где:
гибкая длина элемента вдоль вала между внутренними узлами. Чтобы определить длину каждого гибкого элемента, блок использует алгоритм, который описан в Алгоритме Размещения Узла. Каждый гибкий элемент содержит две инерции. Каждая инерция имеет две поступательных степени свободы, две вращательных степени свободы и одну матрицу жесткости.
Каждый гибкий элемент в эквивалентной физической модели для изгиба в XZ - плоскости (перевод луча в X - направлении и вращении вокруг Y - оси) и в физической модели для изгиба в YZ - плоскость (перевод луча в направлении Y и вращение вокруг Оси X) затем содержит две массы, две инерции и матрицу жесткости.
Чтобы определить внутренние районы узла, и поэтому номер и длины гибких элементов, блок использует тот же алгоритм размещения узла, как это использует в модели скрученности. Для получения дополнительной информации см. Алгоритм Размещения Узла.
m является гибкой массой элемента. m зависит от внешнего, D, и внутренний, d, диаметры, плотность, ρ, вала и длины гибкого элемента, такого что .
Id, момент массы полуэлемента инерции о перпендикуляре оси к оси вала, зависит от массы, m, длины, , и момент скрученности инерции, J, гибкого элемента, такого, что .
суммированные большие матрицы твердых масс, концентрически присоединенных к валу.
Массовые свойства каждой твердой массы, которая концентрически присоединена к валу, добавляются к самому близкому узлу, , таким образом, что
где ID,disk,i является массовым диаметральным моментом инерции о перпендикуляре оси к валу для твердого диска, присоединенного к i th узел. В модели принимается, что диск является тонким, таким образом, вал может все еще изогнуться по обе стороны от осевого местоположения с диском. Концентрическая масса точки имеет .
Уравнение для матрицы затухания
где:
α является затуханием, постоянным пропорциональный массе.
β является затуханием, постоянным пропорциональный жесткости.
Bsupport является коэффициентом затухания в каждой поддержке. Для поддержки в узле ith матрица затухания, в терминах глобальных координат,
где:
счета на гироскопические эффекты любых концентрически присоединенных дисков, и заданы как
где IP,disk,i является массовым полярным моментом инерции об оси вала для диска, присоединенного к i th узел. Массовый полярный момент инерции для концентрической массы точки .
Уравнение для матрицы жесткости подшипника
где:
матрица жесткости для отдельного вала гибкий элемент. Матрица жесткости для вал гибкий элемент, между ith и узлы, имеет ненулевые элементы в строки и столбцы, такие, что
где:
Ksupport является жесткостью в каждой поддержке. Для поддержки в узле ith матрица жесткости, в терминах глобальных координат,
где:
Матрица жесткости поддержки, Ksupport, является ненулевой, только если вы выбираете Bearing matrix или Speed-dependent bearing matrix для поддержки. Если вы выбираете Clamped монтируя тип, кинематические условия нулевого вращения и перевода применяются к степеням свободы, которые соответствуют узлу поддержки (B1, I1, I2 или F1). Если вы выбираете Pinned монтируя тип, кинематические условия нулевого перевода применяются к поступательным степеням свободы, которые соответствуют узлу поддержки (B1, I1, I2 или F1).
Таблица включает граничные условия, применился к смешанным массовым узлам с поддержками.
| Тип поддержки | Граничное условие для смешанного массового уравнения |
|---|
Clamped | |
Pinned | |
Bearing Matrix | Ksupport нетривиален. |
Speed-dependent bearing matrix | Ksupport нетривиален и зависит от скорости вращения вала. На каждом временном шаге KSupport вычисляется как:
где: ΩRef является скоростью подшипника, как задано, в настройках Supports, для параметра Bearing speed [s1,...,sS]. Для каждой поддержки KSupport,Ref является зависимым скорости подшипника поступательная жесткость, которую вы задаете в настройках Supports. Интерполяционная таблица использует линейную интерполяцию и самую близкую экстраполяцию для скорости вращения вала.
|
Матрица, которая представляет степени свободы для всех узлов, , вычисляется таким образом что степени свободы для ith и узлы
Внешние силы из-за каждого статического массового дисбаланса прикладываются к самому близкому узлу. Принуждение в узел
где:
mεj является j thstatic дисбаланс, расположенный в i thnode.
Ωi вал вращательная скорость в процессе моделирования для i th узел.
φshaft, i является смешанным массовым углом поворота скрученности для узла ith.
Изгиб метода Eigenmodes модели
Для eigenmodes метода блок уменьшает изгибающуюся динамику от степени свободы, что изгибающаяся модель смешала массовый метод, обеспечивают к степеням свободы M, где M является количеством режимов.
Блок вычисляет изгибающиеся свойства режима вала во время компиляции модели, затем решает модальные системы массового пружинного демпфера во время симуляции модели.
Сокращение степеней свободы в динамике модели и разделение вычислений во время компиляции и задачи во время выполнения улучшают производительность симуляции. eigenmodes метод принимает, что формы режима незатронуты путем затухания. Поэтому метод подходит лучше всего для моделей, которые включают ограниченный гироскопический диск и затухание поддержки.
Во время компиляции блок вычисляет аппроксимированный ослабленный eigenmodes, использующий эти шаги:
Блок вычисляет матрицы с помощью того же смешанного массового уравнения движения, что это использует в смешанном массовом методе изгибающейся модели:
Для получения дополнительной информации см. Изгибающийся Смешанный Массовый Метод Модели.
При определении узла осевые местоположения для , блок использует одно из двух изменений Алгоритма Размещения Узла, который это использует в модели скрученности, и изгибающаяся модель смешала массовый метод. Изменение, что использование блока зависит от того, устанавливается ли в настройках Advanced Bending параметр Bending mode determination на Simscape determined или к User defined.
Если параметр Bending mode determination устанавливается на Simscape determined, вместо того, чтобы использовать параметр Minimum number of flexible elements в Nmin, как смешанные массовые методы делают, eigenmodes метод вычисляет Nmin как
где:
L является заданным значением, в настройках Shaft, для параметра Shaft length.
dz является заданным значением, в настройках Advanced Bending, для параметра Shaft length increments for mode shape computations.
Чтобы вычислить m незатухающий eigenmodes и собственные частоты, блок использует eigs функция. Уравнение принимает форму:
[H, λ] = eigs( sparse(K), sparse(M), mMax, 'smallestabs’ ),
H матрица собственного вектора. Каждый столбец является eigenmode в координаты.
λ является собственными значениями, которые являются квадратом собственных частот.
mMax является заданным значением, в настройках Advanced Bending, для параметра Limit number of modes.
Количество вычисленного eigenmodes, m, меньше mMax если:
Существуют режимы с собственными частотами, которые превышают заданное значение, в настройках Advanced Bending, для параметра Eigenfrequency upper limit. Блок отбрасывает эти режимы.
Собственным значениям не удается сходиться. Для получения дополнительной информации смотрите eigs.
Если параметр Bending mode determination устанавливается на User defined, блок вычисляет матрицу собственного вектора H из заданных значений, в настройках Advanced Bending, для этих параметров:
X-direction mode shapes
Y-direction mode shapes
Shaft position
К определяет узел осевые местоположения для , блок использует элементы, указанные в параметре Shaft position как первичные узлы.
Чтобы вычислить модальное вращение, θ и φ, для каждого узла, блок использует gradient функция. Уравнения принимают форму:
θ = -gradient(Y direction mode shapes)
φ = gradient(X direction mode shapes)
Блок собирает X-direction mode shapes, Y-direction mode shapes и модальные вращения, θ и φ, в координаты для каждого столбца H.
Блок вычисляет модальные матрицы, MModal, KModal, BModal, GModal и fModal, как:
Несмотря на то, что блок вычисляет незатухающий eigenmodes, H, на шаге 1, модальной матрице затухания, BModal, и модальная gyroscopics матрица, GModal, может смоделировать легкое затухание. Блок нормирует матрицы так, чтобы MModal был единичной матрицей.
В процессе моделирования блок симулирует eigenmode уравнение движения:
где модальные степени свободы, , относитесь к степеням свободы узла:
Зависимый скоростью метод Eigenmodes
Жесткость поддержки и затухание поддержки варьируются, если в настройках Supports монтирующийся параметр типа для какой-либо из поддержек устанавливается на Speed-dependent bearing matrix. Зависимый скорости eigenmodes счета модели на эти эффекты путем варьирования модальных свойств, H, BModal, KModal и fModal как скорость вала изменяется. MModal нормирован к единичной матрице для всех скоростей вала, таким образом, это не зависит от скорости вала.
Если вал имеет зависимые скоростью поддержки подшипника, то блок повторяет изгибающийся режим eigenmodes шаги метода для каждого элемента в векторе скорости вала. Элементы вектора вала являются заданными значениями, в настройках Supports, для параметра Bearing speed [s1,...,sS]. В процессе моделирования модальная жесткость, затухание и принуждение величины настроены на основе интерполяционных таблиц свойств по сравнению со скоростью вала.
Таким образом, блок симулирует eigenmode уравнение движения как:
где KModal, BModal и fModal имеют форму:
где:
ΩRef является заданным значением, в настройках Supports, для параметра Bearing speed [s1,...,sS].
KModal,Ref является таблицей модального stiffnesses в каждом ΩRef.
BModal,Ref является таблицей затухания поддержки в каждом ΩRef.
fModal,Ref является таблицей модального принуждения в каждом ΩRef.
Блок коррелирует подобие формы режима в различных значениях ΩRef и переупорядочивает режимы, при необходимости, так, чтобы каждая модальная степень свободы, , имеет свойства, которые постепенно изменяются со скоростью вала.
Улучшите скорость симуляции или точность
Баланс между точностью симуляции и производительностью зависит от N, количества гибких элементов что использование блока, чтобы представлять вал. Точность симуляции является мерой того, сколько результаты симуляции согласовывают с математическими и эмпирическими моделями. Обычно, в то время как N увеличения, моделирует точность симуляции и точность. Однако вычислительная стоимость симуляции также коррелируется к N, и когда вычислительная стоимость увеличивается, снижения производительности. С другой стороны, когда N уменьшается, увеличения скорости симуляции, но уменьшения точности симуляции.
Чтобы увеличить точность симуляции для смешанного массового метода или для скрученности или для изгибающейся модели, увеличьте минимальное число гибких элементов, Nmin. Модель скрученности одно гибкого элемента показывает крутильную собственную частоту, которая является близко к первой собственной частоте непрерывной модели распределенного параметра. Для большей точности можно выбрать 2, 4, 8, или более гибкие элементы. Например, четыре самых низких крутильных собственных частоты представлены с точностью до 0,1, 1.9, 1.6, и 5,3 процентов, соответственно, моделью с 16 гибкими элементами.
Увеличить точность симуляции для eigenmodes метода к изгибающейся модели:
При симуляции со статической eigenmode зависимостью от скорости вращения проверьте, что параметр Nominal shaft speed for bending modes близко к скорости вала симуляции. Этот параметр может влиять на результаты модели, если вы параметризовали твердый диск, присоединенный к валу с большим массовым моментом инерции об оси вала, или задаете какие-либо зависимые скоростью матричные поддержки подшипника.
При симуляции с динамической eigenmode зависимостью от скорости вращения проверьте, что в настройках Supports заданные значения для Bearing speed [s1,...,sS] порождают линейную оболочку столбцов скорости вала симуляции, или то насыщение жесткости поддержки и ослабляющий на скоростях вала вне области значений является приемлемым приближением.
В настройках Advanced Bending уменьшите значение параметра Shaft length increments for mode shape computations. Сокращение значения может увеличить точность модальных частот и форм.
Уменьшите затухание поддержки и диск полярный момент инерции об оси вала. Расчеты Simscape™ форм режима и частот перед симуляцией не составляют это затухание.
Проверяйте чувствительность к настройкам Advanced Bending при помощи ваших параметров в модели гибкого вала в Вале с Крутильным и Поперечным примером Гибкости. Настройте параметры и используйте ссылки, обеспеченные в примере, чтобы исследовать, как значения влияют на eigenmode частоты и формы. Настройте значения параметров в своей модели соответственно.
Увеличьте значения параметров Limit number of modes и Eigenfrequency upper limit. Самая высокая модальная частота в симуляции должна быть значительно больше, чем частота вращения вала.
Ограничения и предположения
Модель распределенного параметра непрерывного крутильного вала аппроксимирована конечным числом, N, смешанных масс.
Вращение вала и гибкость скрученности волнуют изгиб вала, но изгиб не влияет на вращение вала и гибкость скрученности.
Твердые массы точки или диски, присоединенные к валу, имеют тонкие длины, параллельные оси вала.
Для eigenmodes изгибающаяся модель затухание не влияет на собственные частоты.
Изгиб вала не передается между блоками Flexible Shaft.
Относительно длины вала мал наружный диаметр вала.
Относительно длины вала мало изгибающееся отклонение.
Статические массовые дисбалансы являются единственными изгибающими вал внешними увлекательными загрузками.
Поддержки вала являются стационарными.
Гироскопические эффекты твердых дисков рассматриваются; пропускают гироскопическими эффектами самого вала.
Статическое массовое принуждение дисбаланса в eigenmodes методе использует скорость вращения в средней точке вала.
Если скрученность моделей вала только и использование опции параметризации By stiffness and inertia или By segment stiffness and inertia, блок использует только две поддержки, один каждый в концах F и B.
Порты
Вывод
развернуть все
Fr — Обеспечьте при подшипнике поддержек
физический сигнал
Выходной порт физического сигнала сопоставил с силой, которую вал порождает на поддержки подшипника.
Зависимости
Этот порт отображается, если в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
M — Момент при подшипнике поддержек
физический сигнал
Выходной порт физического сигнала сопоставил с моментом, который вал проявляет на поддержках подшипника.
Зависимости
Этот порт отображается, если в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
V — Вал поступательная скорость
физический сигнал
Выходной порт физического сигнала сопоставлен с поступательной скоростью вала в поддержках подшипника.
Зависимости
Этот порт отображается, если в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
W — Угловая скорость вала
физический сигнал
Выходной порт физического сигнала сопоставлен со скоростью вращения вала в поддержках подшипника.
Зависимости
Этот порт отображается, если в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
Сохранение
развернуть все
B — Основа
вращательное механическое устройство
Вращательный порт сохранения сопоставлен с основой вала.
F — Последователь
вращательное механическое устройство
Вращательный порт сохранения сопоставлен с последователем вала.
Параметры
развернуть все
Вал
Для определенных параметров в настройках Shaft опция, которую вы выбираете, влияет на видимость:
Другие параметры в настройках Shaft.
Параметры в настройках Torsion.
Настройки Supports и параметры.
Настройки Bending
Настройки Advanced Bending
Эти выходные порты:
Таблица показывает, как опции, которые вы выбираете для настроек Shaft, влияют на видимость других параметров в настройках Shaft. Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Зависимости от параметра вала
| Параметры установки вала и значения |
|---|
| Model bending |
Off | On |
| Minimum number of flexible elements | Minimum number of flexible elements |
| Parameterization | Parameterization |
By stiffness and inertia | By material and geometry | By segment stiffness and inertia | By material and segment geometry | By stiffness and inertia | By material and geometry | By segment stiffness and inertia | By material and segment geometry |
| Shaft Length | Segment lengths [B,...,F] | Shaft Length | Shaft Length | Segment lengths [B,...,F] | Segment lengths [B,...,F] |
| Torsional stiffness | Segment torsional stiffness [B,...,F] | Torsional stiffness | Segment torsional stiffness [B,...,F] |
| Torsional inertia | Segment torsional inertia [B,...,F] | Torsional inertia | Segment torsional inertia [B,...,F] |
| Bending rigidity | Segment bending rigidity [B,...,F] |
| Material density | Material density | Linear density | Material density | Segment linear density [B,...,F] | Material density |
| Shear modulus | Shear modulus | Shear modulus | Shear modulus |
| Young's modulus | Young's modulus |
| Shaft geometry | Shaft geometry | Shaft geometry | Shaft geometry |
Solid | Annular | Solid | Annular | Solid | Annular | Solid | Annular |
| Shaft outer diameter | Shaft outer diameter | Segment outer diameter [B,...,F]
| Segment outer diameter [B,...,F] | Shaft outer diameter | Shaft outer diameter | Segment outer diameter [B,...,F] | Segment outer diameter [B,...,F] |
| Shaft inner diameter | Segment inner diameter [B,...,F] | Shaft inner diameter | Segment inner diameter [B,...,F] |
Model bending — Изгиб опции модели
Off (значение по умолчанию) | On
Опция к изгибу вала модели.
Зависимости
Эти параметры, настройки и порты затронуты параметром Model bending.
Для настроек Shaft видимость зависимых параметров сведена в таблицу в Зависимостях от Параметра Вала.
В настройках Torsion:
Параметр Viscous friction coefficients at base (B) and follower (F) отображается, если в настройках Shaft Model bending установлен в Off и Parameterization установлен в By stiffness and inertia или By segment stiffness and inertia.
Параметр Viscous friction coefficients at each support [B1,...,F1] отображается, если в настройках Shaft одно из этих условий соблюдают:
Эти настройки отсоединены, только если Model bending установлен в On:
Supports
Bending
Advanced bending
Эти порты осушены, только если Model bending установлен в On:
Minimum number of flexible elements — Минимальное количество гибких элементов
1
Минимальное количество гибких элементов, Nmin, для приближения.
Возможно, что гибкие элементы имеют различные длины или что симулированное количество гибких элементов, N, больше, чем Nmin. Для получения дополнительной информации см. Алгоритм Размещения Узла.
Большее число гибких элементов, N, увеличивает точность модели, но уменьшает производительность симуляции. Одна гибкая модель элемента (N =1) показывает собственную частоту скрученности, которая является близко к первой собственной частоте непрерывной модели распределенного параметра.
Если точность модели более важна, чем производительность, выберите 2, 4, 8, или более гибкие элементы. Например, четыре самых низких собственных частоты скрученности представлены с точностью до 0,1, 1.9, 1.6, и 5,3 процентов, соответственно, моделью с 16 гибкими элементами. Обычно более гибкие элементы требуются для того, чтобы точно смоделировать изгибающуюся динамику, чем требуется для того, чтобы точно смоделировать динамику скрученности.
Для получения дополнительной информации смотрите, Улучшают Скорость симуляции или Точность.
Parameterization — Метод параметризации
By stiffness and inertia (значение по умолчанию) | By material and geometry | By segment stiffness and inertia | By material and segment geometry
Метод параметризации. Можно смоделировать гомогенный вал или тот, который по оси неоднороден для любого из этих атрибутов:
Крутильная жесткость
Крутильная инерция
Изгиб жесткости
Плотность
Сдвиньте модуль
Модуль молодежи
Наружный диаметр
Внутренний диаметр
Опции параметризации для гомогенной модели вала:
By stiffness and inertia — Задайте крутильную жесткость и инерцию и плотность на единицу длины вала. Для изгибающейся модели также задайте изгибающуюся жесткость и длину вала.
By material and geometry — Задайте длину и осевую перекрестную частную геометрию, в терминах внутренних и наружных диаметров, вала. Для материала вала задайте плотность и сдвиньте модуль. Для изгибающейся модели также задайте модуль Янга для материала вала.
Опции параметризации для по оси неоднородной модели вала:
By segment stiffness and inertia — Для каждого сегмента вала задайте крутильную жесткость, крутильную инерцию и плотность на единицу длины. Для изгибающейся модели также задайте изгибающуюся жесткость и длину для каждого сегмента.
By material and segment geometry — Для каждого сегмента вала задайте длину и осевую перекрестную частную геометрию, в терминах внутренних и наружных диаметров. Для материала вала задайте плотность и сдвиньте модуль. Для изгибающейся модели также задайте модуль Янга для материала вала.
Зависимости
Каждая опция Parameterization влияет на видимость:
Зависимые параметры в настройках Shaft. Для получения дополнительной информации смотрите Зависимости от Параметра Вала.
Зависимые параметры в настройках Torsion:
Параметр Viscous friction coefficients at base (B) and follower (F) отображается, если в настройках Shaft Model bending установлен в Off и Parameterization установлен в By stiffness and inertia или By segment stiffness and inertia.
Параметр Viscous friction coefficients at each support [B1,...,F1] отображается, если в настройках Shaft одно из этих условий соблюдают:
Настройки Supports. Когда параметр Model bending устанавливается на Off, настройки Supports отображаются, когда параметр Parameterization устанавливается на By material and geometry или By material and segment geometry.
Shaft length — Длина вала
1 m (значение по умолчанию) | положительная скалярная величина
Длина вала.
Зависимости
Этот параметр отображается, когда одно из этих условий соблюдают:
Model bending установлен в Off и Parameterization установлен в By material and geometry.
Model bending установлен в On и Parameterization установлен в By material and geometry или By stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Segment lengths [B,...,F] — Длина каждого сегмента вала
[1, .5, .25]
Длина каждого сегмента вала, что вал разделен на продольно для моделирования по оси неоднородного вала. Число элементов в векторе равно количеству сегментов, которые вы используете, чтобы смоделировать неоднородный вал. Порядок элементов в векторе соответствует порядку сегмента относительно B, основного конца вала.
Зависимости
Этот параметр отображается, когда одно из этих условий соблюдают:
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Torsional stiffness — Существенная жесткость
2e5
N*m/rad (значение по умолчанию) | положительная скалярная величина
Закрутите на скручивание радиана вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Segment torsional stiffness [B,...,F] — Существенная жесткость для каждого сегмента вала
[400000, 200000, 100000] N*m/rad (значение по умолчанию) | положительный вектор
Закрутите на скручивание радиана для каждого сегмента вала. Число элементов в векторе должно совпасть с числом элементов, заданным для параметра Segment lengths [B,...,F]. Порядок элементов в векторе соответствует порядку сегмента относительно B, основного конца вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By segment stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Torsional Inertia — Полярный момент инерции
0.02 kg*m^2 (значение по умолчанию) | положительная скалярная величина
Способность вала сопротивляться крутильному ускорению.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Segment torsional inertia [B,...,F] — Полярный момент инерции для каждого сегмента вала
[.025, .02, .015] kg*m^2 (значение по умолчанию) | положительный вектор
Способность каждого сегмента вала сопротивляться крутильному ускорению. Число элементов в векторе должно совпасть с числом элементов, заданным для параметра Segment lengths [B,...,F]. Порядок элементов в векторе соответствует порядку сегмента относительно, B, основной конец вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By segment stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Bending rigidity — Изгиб жесткости
5e5
m^4*Pa (значение по умолчанию) | положительная скалярная величина
Изгиб жесткости для материала вала.
Зависимости
Этот параметр отображается, когда Model bending установлен в On и Parameterization установлен в By stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Segment bending rigidity [B,...,F] — Изгиб жесткости каждого сегмента
[600000, 500000, 400000] m^4*Pa (значение по умолчанию) | положительный вектор
Изгиб жесткости для материала каждого последовательного сегмента вала. Число элементов в векторе должно совпасть с числом элементов, заданным для параметра Segment lengths [B,...,F]. Порядок элементов в векторе соответствует порядку сегмента относительно B, основного конца вала.
Зависимости
Этот параметр отображается, когда Model bending установлен в On и Parameterization установлен в By segment stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Linear density — Плотность на единицу длины
19 kg/m (значение по умолчанию) | положительная скалярная величина
Плотность материала вала на единицу длины вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Segment linear density [B,...,F] — Плотность на единицу длины для каждого сегмента
[20, 19, 18] kg/m (значение по умолчанию) | положительный вектор
Плотность материала вала на единицу длины каждого сегмента вала. Число элементов в векторе должно совпасть с числом элементов, заданным для параметра Segment lengths [B,...,F]. Порядок элементов в векторе соответствует порядку сегмента относительно B, основного конца вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By segment stiffness and inertia.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Material density — Существенная плотность
7.8e3
kg/m^3 (значение по умолчанию) | положительная скалярная величина
Плотность материала вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By material and geometry или By material and segment geometry.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Shear modulus — Сдвиньте модуль
7.93e9
Pa (значение по умолчанию) | положительная скалярная величина
Сдвиньте модуль для материала вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By material and geometry или By material and segment geometry.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Young's modulus — Модуль молодежи
200e9
Pa (значение по умолчанию) | положительная скалярная величина
Модуль молодежи для материала.
Зависимости
Этот параметр отображается, когда Model bending установлен в On и Parameterization установлен в By material and geometry или By material and segment geometry.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Shaft geometry — Перекрестная частная геометрия
Solid (значение по умолчанию) | Annular
Перекрестная частная геометрия вдоль вала. Если вал или сегменты вала являются полыми, выберите Annular. В противном случае выберите Solid.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By material and geometry или By material and segment geometry.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Shaft outer diameter — Наружный диаметр вала
0.075 m (значение по умолчанию) | положительная скалярная величина
Наружный диаметр вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By material and geometry.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Segment outer diameter [B,...,F] — Наружный диаметр для каждого сегмента вала
[.085, .075, .065] m (значение по умолчанию) | положительный вектор
Наружный диаметр каждого сегмента вала. Число элементов в векторе должно совпасть с числом элементов, заданным для параметра Segment lengths [B,...,F]. Порядок элементов в векторе соответствует порядку сегмента относительно B, основного конца вала.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By material and segment geometry.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Shaft inner diameter — Внутренний диаметр вала
0.05 m (значение по умолчанию) | positve скаляр
Внутренний диаметр кольцевого вала. Значение должно быть меньшим, чем значение, заданное для параметра Shaft outer diameter.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By material and geometry и Shaft geometry установлен в Annular.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Segment inner diameter [B,...,F] — Внутренний диаметр для каждого сегмента вала
[.055, .05, .045] m (значение по умолчанию) | вектор
Внутренние диаметры сегментов вала. Число элементов в векторе должно совпасть с числом элементов, заданным для параметра Segment lengths [B,...,F]. Порядок элементов в векторе соответствует порядку сегмента относительно B, основного конца вала. Каждое значение должно быть меньшим, чем соответствующее значение, заданное для параметра Segment outer diameter [B,...,F]. Если сегмент вала тверд, задайте 0 для соответствующего векторного элемента. По крайней мере один элемент в векторе должен быть положительным.
Зависимости
Этот параметр отображается, когда Parameterization установлен в By material and segment geometry и Shaft geometry установлен в Annular.
Для получения дополнительной информации о том, как другие параметры влияют на видимость этого параметра, видят Зависимости от Параметра Вала.
Скрученность
Damping ratio from internal losses — Материальный коэффициент затухания
0.01
Материальный коэффициент затухания.
Viscous friction coefficients at base (B) and follower (F) — Коэффициенты вязкого трения
[0, 0] N*m/(rad/s) (значение по умолчанию) | неотрицательный вектор
Коэффициенты вязкого трения в основе, B, и последователе, F, концах вала. Вектор должен содержать два элемента.
Зависимости
Этот параметр отображается, если в настройках Shaft Model bending установлен в Off и Parameterization установлен в By stiffness and inertia или By segment stiffness and inertia.
Viscous friction coefficients at each support [B1,...,F1] — Коэффициенты вязкого трения
[0, 0] N*m/(rad/s) (значение по умолчанию) | неотрицательный вектор
Коэффициенты вязкого трения в каждой поддержке. Число элементов в векторе должно совпасть с номером, заданным в настройках Supports для параметра Number of supports. Порядок элементов должен соответствовать последовательному положению каждой поддержки B, основной конец вала.
Зависимости
Этот параметр отображается, если в настройках Shaft одно из этих условий соблюдают:
Initial shaft torsional deflection — Начальный вал крутильное отклонение
0 rad (значение по умолчанию) | неотрицательный скаляр
Угловое отклонение вала в начале симуляции.
Положительное начальное отклонение приводит к положительному вращению B, основному концу вала, относительно F, конца последователя вала.
Initial shaft angular velocity — Начальная скорость вращения
0 rpm (значение по умолчанию) | неотрицательный скаляр
Скорость вращения вала в начале симуляции.
Поддержки
Настройки Supports отображаются, если в настройках Shaft одно из этих условий соблюдают:
Model bending установлен в Off и Parameterization установлен в By material and geometry или By material and segment geometry.
Для этого условия только отображаются эти параметры в настройках Supports:
Model bending установлен в On.
Видимость настроек Supports зависит от значений нескольких параметров в настройках Supports.
В настройках Supports, если параметр Number of supports устанавливается на 2, только монтирование типов и зависимых параметров для B1 и поддержек F1 отображается. Поддержка B1 является поддержкой, которая является самой близкой к B, основному концу вала. Поддержка F1 является поддержкой, которая является самой близкой к F, концу последователя вала. Если Number of supports установлен в значение, больше, чем 2, монтирующийся тип и зависимые параметры отсоединены для промежуточных поддержек, IN, где N является количеством промежуточных поддержек. Например, для 3 поддержки, монтирующийся тип и зависимые параметры для B1, I1 и поддержки F1 отсоединены.
Эти таблицы показывают зависимости от параметра для Lumped Mass и Eigenmodes изгиб методов анализа вибрации для каждого типа монтирования. Параметры отображаются для B1 и поддержек F1 и для любых промежуточных поддержек, I1 и I2, который вы задаете. Имена зависимых параметров снабжаются префиксом под названием соответствующая поддержка. Например, для поддержки B1, зависимый параметр Rotational damping [xx,yy] называют Base (B1) rotational damping [xx,yy]. Префиксы параметра:
Base (B1)
Intermediate (I1)
Intermediate (I2)
Follower (F1)
Монтирование зависимостей от параметра типа
| Типы монтирования Supports и зависимые параметры |
|---|
Clamped | Pinned | Free | Bearing matrix | Speed-dependent bearing matrix |
|---|
| - | Rotational damping [xx,yy] | Rotational damping [xx,yy] | Rotational damping [xx,yy] | Rotational damping [xx,yy] |
| Translational damping [xx,xy,yx,yy] | Speed-dependent translational damping [xx1,xy1, yx1,yy1;...xxS,xyS,yxS,yyS] |
| Rotational stiffness [xx,yy] | Rotational stiffness [xx,yy] |
| Translational stiffness [xx,xy,yx,yy] | Speed-dependent translational stiffness [xx1,xy1,yx1, yy1;...xxS,xyS,yxS,yyS] |
| Bearing speed [s1,…,sS] |
Number of supports — Количество поддержек
2 3| 4
Количество поддержек вала.
Зависимости
Этот параметр отображается, если в настройках Shaft одно из этих условий соблюдают:
Если этот параметр устанавливается на:
2
3
4
Support locations relative to base (B) — Поддержите местоположения
[0, 1] m (значение по умолчанию) | неотрицательный увеличивающийся вектор
Поддержите местоположения относительно B, основного конца вала. Число элементов должно совпасть с номером, заданным для параметра Number of supports. Порядок элементов соответствует последовательному положению каждой поддержки относительно основного конца вала. Самое большое значение должно быть не больше, чем длина вала. Для сегментированной модели вала длина вала равна сумме отдельных длин сегмента.
Зависимости
Этот параметр отображается, если в настройках Shaft одно из этих условий соблюдают:
Base (B1) mounting type — Поддержите тип монтирования B1
Clamped (значение по умолчанию) | Pinned | Free | Bearing matrix | Speed-dependent bearing matrix
Тип монтирования в основном конце вала.
Зависимости
Этот параметр отображается, когда, в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите Зависимости от Параметра Вала.
Установка этого параметра на Pinned, Free, Bearing matrix, или Speed-dependent bearing matrix отсоединяет связанные параметры. Для получения дополнительной информации смотрите Монтирующиеся Зависимости от Параметра Типа.
Base (B1) rotational damping [xx,yy] — Поддержите B1 вращательное затухание
[1e3, 1e3]
N*m/(rad/s) (значение по умолчанию) | вектор
Вращательное затухание для поддержки B1. B1 является поддержкой, которая является самой близкой к B, основному концу вала. Элементы двухэлементного вектора:
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Base (B1) translational damping [xx,xy,yx,yy] — Поддержите B1 поступательное затухание
[2e4, -4.4e4, -4.4e4, 3.5e5]
N/(m/s) (значение по умолчанию) | вектор
Поступательное затухание для поддержки B1. Элементы четырехэлементного вектора:
xx — Ослабляющий в x - направление оси
xy — Ослабляющий в x - направлении оси вместе с движением в y - направление оси
yx — Ослабляющий в y - направлении оси вместе с движением в x - направление оси
yy — Ослабляющий в y - направление оси
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Base (B1) speed-dependent translational damping [xx1,xy1,yx1,yy1;...xxS,xyS,yxS,yyS] — Поддержите зависимого скорости B1 поступательное затухание
[2e4, -4.4e4, -4.4e4, 3.5e5; 1e4, -2.5e4, -2.5e4, 1.4e5; 5e3, -1.0e4, -1.0e4, 2.0e4]
N/(m/s) (значение по умолчанию) | матрица
Зависимое скоростью поступательное затухание для поддержки B1. Количество строк в матрице должно равняться числу элементов в векторе, заданном для параметра Bearing speed [s1, … sS]. Каждая строка содержит четыре элемента:
xxs — Ослабляющий в x - направление оси в s th скорость
xys — Ослабляющий в x - направлении оси вместе с движением в y - направление оси в s th скорость
yxs — Ослабляющий в y - направлении оси вместе с движением в x - направление оси в s th скорость
yys — Ослабляющий в y - направление оси в s th скорость
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Base (B1) rotational stiffness [xx,yy] — Поддержите B1 вращательная жесткость
[1e4, 1e4]
N*m/rad (значение по умолчанию) | неотрицательный вектор
Вращательная жесткость для поддержки B1. Элементы двухэлементного вектора:
xx — жесткость о x - ось
yy — жесткость о y - ось
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Base (B1) translational stiffness [xx,xy,yx,yy] — Поддержите B1 поступательная жесткость
[1e6, -2e5, -3e5, 5e]
N/m (значение по умолчанию) | вектор
Поступательная жесткость для поддержки B1. Элементы четырехэлементного вектора:
xx — Жесткость в x - направление оси
xy — Жесткость в x - направлении оси вместе с движением в y - направление оси
yx — Жесткость в y - направлении оси вместе с движением в x - направление оси
yy — Жесткость в y - направление оси
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Base (B1) speed-dependent translational stiffness [xx1,xy1,yx1,yy1;...xxS,xyS,yxS,yyS] — Поддержите зависимого скорости B1 поступательная жесткость
[1e6, -6e5, -3.5e6, 8e6; 1e6, -2e5, -3.0e6, 5e6; 1e6, -5e4, -2.5e6, 3e6]
N/m (значение по умолчанию) | матрица
Зависимая скоростью поступательная жесткость для поддержки B1. Количество строк в матрице должно равняться числу элементов в векторе, заданном для параметра Bearing speed [s1, … sS]. Каждая строка содержит четыре элемента:
xxs — Жесткость в x - направление оси в s th скорость
xys — Жесткость в x - направлении оси вместе с движением в y - направление оси в s th скорость
yxs — Жесткость в y - направлении оси вместе с движением в x - направление оси в s th скорость
yys — Жесткость в y - направление оси в s th скорость
Весь xx и значения жесткости yy должны быть положительными. Весь xy и значения yx должны быть нулем или ненулевой на всех скоростях.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I1) mounting type — Поддержите тип монтирования I1
Clamped (значение по умолчанию) | Pinned | Free | Bearing matrix | Speed-dependent bearing matrix
Тип монтирования в поддержке I1. Поддержка I1 является самой близкой промежуточной поддержкой поддержке B1.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
Установка этого параметра на Pinned, Free, Bearing matrix, или Speed-dependent bearing matrix отсоединяет связанные параметры. Для получения дополнительной информации смотрите Монтирующиеся Зависимости от Параметра Типа.
Intermediate (I1) rotational damping [xx,yy] — Поддержите I1 вращательное затухание
[1e3, 1e3]
N*m/(rad/s) (значение по умолчанию) | вектор
Вращательное затухание для поддержки I1. Элементы двухэлементного вектора:
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I1) translational damping [xx,xy,yx,yy] — Поддержите I1 поступательное затухание
[2e4, -4.4e4, -4.4e4, 3.5e5]
N/(m/s) (значение по умолчанию) | вектор
Поступательное затухание для поддержки I1. Элементы четырехэлементного вектора:
xx — Ослабляющий в x - направление оси
xy — Ослабляющий в x - направлении оси вместе с движением в y - направление оси
yx — Ослабляющий в y - направлении оси вместе с движением в x - направление оси
yy — Ослабляющий в y - направление оси
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I1) speed-dependent translational damping [xx1,xy1,yx1,yy1;...xxsS,xyS,yxS,yyS] — Поддержите зависимого скорости I1 поступательное затухание
[2e4, -4.4e4, -4.4e4, 3.5e5; 1e4, -2.5e4, -2.5e4, 1.4e5; 5e3, -1.0e4, -1.0e4, 2.0e4]
N/(m/s) (значение по умолчанию) | матрица
Зависимое скоростью поступательное затухание для поддержки I1. Количество строк в матрице должно равняться числу элементов в векторе, заданном для параметра Bearing speed [s1, … sS]. Каждая строка содержит четыре элемента:
xxs — Ослабляющий в x - направление оси в s th скорость
xys — Ослабляющий в x - направлении оси вместе с движением в y - направление оси в s th скорость
yxs — Ослабляющий в y - направлении оси вместе с движением в x - направление оси в s th скорость
yys — Ослабляющий в y - направление оси в s th скорость
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I1) rotational stiffness [xx,yy] — Поддержите I1 вращательная жесткость
[1e4, 1e4]
N*m/rad (значение по умолчанию) | неотрицательный вектор
Вращательная жесткость для поддержки I1. Элементы двухэлементного вектора:
xx — жесткость о x - ось
yy — жесткость о y - ось
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I1) translational stiffness [xx,xy,yx,yy] — Поддержите I1 поступательная жесткость
[1e6, -2e5, -3e5, 5e]
N/m (значение по умолчанию) | вектор
Поступательная жесткость для поддержки I1. Элементы четырехэлементного вектора:
xx — Жесткость в x - направление оси
xy — Жесткость в x - направлении оси вместе с движением в y - направление оси
yx — Жесткость в y - направлении оси вместе с движением в x - направление оси
yy — Жесткость в y - направление оси
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I1) speed-dependent translational stiffness [xx1,xy1,yx1,yy1;...xxS,xyS,yxS,yyS] — Поддержите зависимого скорости I1 поступательная жесткость
[1e6, -6e5, -3.5e6, 8e6; 1e6, -2e5, -3.0e6, 5e6; 1e6, -5e4, -2.5e6, 3e6]
N/m (значение по умолчанию) | матрица
Зависимая скоростью поступательная жесткость для поддержки I1. Количество строк в матрице должно равняться числу элементов в векторе, заданном для параметра Bearing speed [s1, … sS]. Каждая строка содержит четыре элемента:
xxs — Жесткость в x - направление оси в s th скорость
xys — Жесткость в x - направлении оси вместе с движением в y - направление оси в s th скорость
yxs — Жесткость в y - направлении оси вместе с движением в x - направление оси в s th скорость
yys — Жесткость в y - направление оси в s th скорость
Весь xx и значения жесткости yy должны быть положительными. Весь xy и значения yx должны быть нулем или ненулевой на всех скоростях.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I2) mounting type — Поддержите тип монтирования I2
Clamped (значение по умолчанию) | Pinned | Free | Bearing matrix | Speed-dependent bearing matrix
Тип монтирования в поддержке I2. Поддержка I2 расположена между поддержками F1 и I1.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
Установка этого параметра на Pinned, Free, Bearing matrix, или Speed-dependent bearing matrix отсоединяет связанные параметры. Для получения дополнительной информации смотрите Монтирующиеся Зависимости от Параметра Типа.
Intermediate (I2) rotational damping [xx,yy] — Поддержите I2 вращательное затухание
[1e3, 1e3]
N*m/(rad/s) (значение по умолчанию) | вектор
Вращательное затухание для поддержки I2. Элементы двухэлементного вектора:
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I2) translational damping [xx,xy,yx,yy] — Поддержите I2 поступательное затухание
[2e4, -4.4e4, -4.4e4, 3.5e5]
N/(m/s) (значение по умолчанию) | вектор
Поступательное затухание для поддержки I2. Элементы четырехэлементного вектора:
xx — Ослабляющий в x - направление оси
xy — Ослабляющий в x - направлении оси вместе с движением в y - направление оси
yx — Ослабляющий в y - направлении оси вместе с движением в x - направление оси
yy — Ослабляющий в y - направление оси
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I2) speed-dependent translational damping [xx1,xy1,yx1,yy1;...xxS,xyS,yxS,yyS] — Поддержите зависимого скорости I2 поступательное затухание
[2e4, -4.4e4, -4.4e4, 3.5e5; 1e4, -2.5e4, -2.5e4, 1.4e5; 5e3, -1.0e4, -1.0e4, 2.0e4]
N/(m/s) (значение по умолчанию) | матрица
Зависимое скоростью поступательное затухание для поддержки I2. Количество строк в матрице должно равняться числу элементов в векторе, заданном для параметра Bearing speed [s1, … sS]. Каждая строка содержит четыре элемента:
xxs — Ослабляющий в x - направление оси в s th скорость
xys — Ослабляющий в x - направлении оси вместе с движением в y - направление оси в s th скорость
yxs — Ослабляющий в y - направлении оси вместе с движением в x - направление оси в s th скорость
yys — Ослабляющий в y - направление оси в s th скорость
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I2) rotational stiffness [xx,yy] — Поддержите I2 вращательная жесткость
[1e4, 1e4]
N*m/rad (значение по умолчанию) | неотрицательный вектор
Вращательная жесткость для поддержки I2. Элементы двухэлементного вектора:
xx — жесткость о x - ось
yy — жесткость о y - ось
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I2) translational stiffness [xx,xy,yx,yy] — Поддержите I2 поступательная жесткость
[1e6, -2e5, -3e5, 5e]
N/m (значение по умолчанию) | вектор
Поступательная жесткость для поддержки I2. Элементы четырехэлементного вектора:
xx — Жесткость в x - направление оси
xy — Жесткость в x - направлении оси вместе с движением в y - направление оси
yx — Жесткость в y - направлении оси вместе с движением в x - направление оси
yy — Жесткость в y - направление оси
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Intermediate (I2) speed-dependent translational stiffness [xx1,xy1,yx1,yy1;...xxS,xyS,yxS,yyS] — Поддержите зависимого скорости I2 поступательная жесткость
[1e6, -6e5, -3.5e6, 8e6; 1e6, -2e5, -3.0e6, 5e6; 1e6, -5e4, -2.5e6, 3e6]
N/m (значение по умолчанию) | вектор
Зависимая скоростью поступательная жесткость для поддержки I2. Количество строк в матрице должно равняться числу элементов в векторе, заданном для параметра Bearing speed [s1, … sS]. Каждая строка содержит четыре элемента:
xxs — Жесткость в x - направление оси в s th скорость
xys — Жесткость в x - направлении оси вместе с движением в y - направление оси в s th скорость
yxs — Жесткость в y - направлении оси вместе с движением в x - направление оси в s th скорость
yys — Жесткость в y - направление оси в s th скорость
Весь xx и значения жесткости yy должны быть положительными. Весь xy и значения yx должны быть нулем или ненулевой на всех скоростях.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Follower (F1) mounting type — Поддержите тип монтирования F1
Clamped (значение по умолчанию) | Pinned | Free | Bearing matrix | Speed-dependent bearing matrix
Тип монтирования в конце последователя вала.
Зависимости
Этот параметр отображается, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите Зависимости от Параметра Вала.
Установка этого параметра на Pinned, Free, Bearing matrix, или Speed-dependent bearing matrix отсоединяет связанные параметры. Для получения дополнительной информации смотрите Монтирующиеся Зависимости от Параметра Типа и Монтирующий Зависимости от Параметра Типа.
Follower (F1) rotational damping [xx,yy] — Поддержите F1 вращательное затухание
[1e3, 1e3]
N*m/(rad/s) (значение по умолчанию) | вектор
Вращательное затухание для поддержки F1, которая является поддержкой, которая расположена самая близкая к F, концу последователя вала. Элементы двухэлементного вектора:
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Follower (F1) translational damping [xx,xy,yx,yy] — Поддержите F1 поступательное затухание
[2e4, -4.4e4, -4.4e4, 3.5e5]
N/(m/s) (значение по умолчанию) | вектор
Поступательное затухание для поддержки F1, которая является поддержкой, которая является самой близкой к F, концу последователя вала. Элементы четырехэлементного вектора:
xx — Ослабляющий в x - направление оси
xy — Ослабляющий в x - направлении оси вместе с движением в y - направление оси
yx — Ослабляющий в y - направлении оси вместе с движением в x - направление оси
yy — Ослабляющий в y - направление оси
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Follower (F1) speed-dependent translational damping [xx1,xy1,yx1,yy1;...xxS,xyS,yxS,yyS] — Поддержите зависимого скорости F1 поступательное затухание
[2e4, -4.4e4, -4.4e4, 3.5e5; 1e4, -2.5e4, -2.5e4, 1.4e5; 5e3, -1.0e4, -1.0e4, 2.0e4]
N/(m/s) (значение по умолчанию) | матрица
Зависимое скоростью поступательное затухание для поддержки F1, которая является поддержкой, которая является самой близкой к F, концу последователя вала.
Количество строк в матрице должно равняться числу элементов в векторе, заданном для параметра Bearing speed [s1, … sS]. Каждая строка содержит четыре элемента:
xxs — Ослабляющий в x - направление оси в s th скорость
xys — Ослабляющий в x - направлении оси вместе с движением в y - направление оси в s th скорость
yxs — Ослабляющий в y - направлении оси вместе с движением в x - направление оси в s th скорость
yys — Ослабляющий в y - направление оси в s th скорость
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Follower (F1) rotational stiffness [xx,yy] — Поддержите F1 вращательная жесткость
[1e4, 1e4]
N*m/rad (значение по умолчанию) | неотрицательный вектор
Вращательная жесткость для поддержки F1, которая является поддержкой, которая является самой близкой к F, концу последователя вала. Элементы двухэлементного вектора:
xx — жесткость о x - ось
yy — жесткость о y - ось
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Follower (F1) translational stiffness [xx,xy,yx,yy] — Поддержите F1 поступательная жесткость
[1e6, -2e5, -3e5, 5e]
N/m (значение по умолчанию) | вектор
Поступательная жесткость для поддержки F1, которая является поддержкой, которая является самой близкой к F, концу последователя вала. Элементы четырехэлементного вектора:
xx — Жесткость в x - направление оси
xy — Жесткость в x - направлении оси вместе с движением в y - направление оси
yx — Жесткость в y - направлении оси вместе с движением в x - направление оси
yy — Жесткость в y - направление оси
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Follower (F1) speed-dependent translational stiffness [xx1,xy1,yx1,yy1;...xxS,xyS,yxS,yyS] — Поддержите зависимого скорости F1 поступательная жесткость
[1e6, -6e5, -3.5e6, 8e6; 1e6, -2e5, -3.0e6, 5e6; 1e6, -5e4, -2.5e6, 3e6]
N/m (значение по умолчанию) | матрица
Зависимая скоростью поступательная жесткость для поддержки F1, которая является поддержкой, которая является самой близкой к F, концу последователя вала.
Количество строк в матрице должно равняться числу элементов в векторе, заданном для параметра Bearing speed [s1, … sS]. Каждая строка содержит четыре элемента:
xxs — Жесткость в x - направление оси в s th скорость
xys — Жесткость в x - направлении оси вместе с движением в y - направление оси в s th скорость
yxs — Жесткость в y - направлении оси вместе с движением в x - направление оси в s th скорость
yys — Жесткость в y - направление оси в s th скорость
Весь xx и значения жесткости yy должны быть положительными. Весь xy и значения yx должны быть нулем или ненулевой на всех скоростях.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
Bearing speed [s1,...,sS] — Поддержите скорость вращения подшипника
[200, 500, 1500] rpm (значение по умолчанию) | неотрицательный вектор
Поддержите скорость вращения подшипника.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
В настройках Shaft Model bending установлен в On. Для получения дополнительной информации смотрите Зависимости от Параметра Вала.
В настройках Support по крайней мере один из этих параметров устанавливается на Speed-dependent bearing matrix:
Base (B1) mounting type
Intermediate (I1) mounting type
Intermediate (I2) mounting type
Follower (F1) mounting type
Для получения дополнительной информации смотрите Монтирующиеся Зависимости от Параметра Типа и Монтирующий Зависимости от Параметра Типа.
Изгиб
Настройки Bending отображаются, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
Таблица показывает, как в настройках Bending заданное значение для параметра Rigid masses concentrically attached to shaft влияет на видимость связанных параметров. Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Твердые массы, концентрически присоединенные к зависимостям от параметра вала
| Rigid Masses Concentrically Attached to Shaft |
|---|
None | Point mass | Disk |
| - | Rigid mass distances from base (B) | Rigid mass distances from base (B) |
| Rigid masses | Rigid masses |
| Rigid mass diametric moments of inertia about axis perpendicular to shaft |
| Rigid mass polar moments of inertia about shaft axis |
Damping constant proportional to mass — Затухание постоянного α
10 1/s (значение по умолчанию) | положительная скалярная величина
Ослабляя постоянный, α, пропорциональный массе.
Когда eigenmodes, который изгибающаяся модель включена, демпфер перевода в каждой модальной системе массового пружинного демпфера, имеет коэффициент затухания aMMode, где MMode является модальной массой.
Когда смешанная модель изгиба массы включена, матрица затухания, αM добавляется к системе. M является уравнением большой матрицы движения.
Зависимости
Этот параметр отображается, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
Damping constant proportional to stiffness — Затухание постоянного β
1e-8
s (значение по умолчанию) | положительная скалярная величина
Ослабляя постоянный, β, пропорциональный жесткости.
Когда смешанная модель изгиба массы включена, матрица затухания, βK добавляется к системе. K является уравнением матрицы жесткости движения. Когда eigenmodes, который изгибающаяся модель включена, затухание βKModal, добавляется к системе.
Зависимости
Этот параметр отображается, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
Rigid masses concentrically attached to shaft — Тип твердых масс присоединяется к валу
None (значение по умолчанию) | Point mass | Disk
Введите, если таковые имеются, твердых масс, присоединенных к валу.
Зависимости
Этот параметр отображается, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
Заданное значение для этого параметра влияет на видимость связанных параметров. Для получения дополнительной информации смотрите Твердые Массы, Концентрически Присоединенные к Зависимостям от Параметра Вала.
Rigid mass distances from base (B) — Твердые массовые местоположения вдоль вала в расстоянии от основного узла
0.5 m (значение по умолчанию) | неотрицательный скаляр или вектор
Твердые массовые местоположения вдоль вала в расстоянии от B, основного конца вала. Для нескольких масс задайте увеличивающийся вектор-строку. Число элементов в векторе должно быть равно количеству масс, которые присоединены к валу. Значение скаляра или, для нескольких масс, самое большое значение в векторе не должно превышать длину вала.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
Rigid masses — Масса твердых масс концентрически присоединяется к валу
2 kg (значение по умолчанию) | положительная скалярная величина или вектор
Масса твердых масс концентрически присоединяется к валу. Для нескольких масс задайте вектор-строку. Номер и порядок элементов в векторе должны соответствовать элементам в векторе, заданном для параметра Rigid mass distances from base (B).
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
Rigid mass diametric moments of inertia about axis perpendicular to shaft — Диаметральные моменты инерции о перпендикуляре оси к валу
0.025 kg*m^2 (значение по умолчанию) | положительная скалярная величина или вектор
Твердые массовые моменты инерции о перпендикуляре оси к валу. Для нескольких масс задайте вектор-строку. Номер и порядок элементов в векторе должны соответствовать элементам в векторе, заданном для параметра Rigid mass distances from base (B).
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
Rigid mass polar moments of inertia about shaft axis — Полярные моменты инерции об оси вала
0.050 kg*m^2 (значение по умолчанию) | положительная скалярная величина или вектор
Твердые полярные массовые моменты инерции о принципиальной оси вала. Для нескольких масс задайте вектор-строку. Номер и порядок элементов в векторе должны соответствовать элементам в векторе, заданном для параметра Rigid mass distances from base (B).
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
Static unbalances that excite bending — Excitational статические дисбалансы
[.01, .01] m*kg (значение по умолчанию) | неотрицательный вектор
Статические дисбалансы, которые волнуют изгиб.
Зависимости
Этот параметр отображается, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
Static unbalance distances from base (B) — Статические расстояния дисбаланса от основы
[.33, .67] m (значение по умолчанию) | неотрицательный вектор
Расстояние excitational статических дисбалансов от B, основного конца вала.
Зависимости
Этот параметр отображается, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
Static unbalance offset angles — Статический дисбаланс возместил углы
[0, pi]
rad (значение по умолчанию) | неотрицательный вектор
Начальный угол, о центральной линии вала относительно x - ось, excitational статических дисбалансов.
Зависимости
Этот параметр отображается, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
Усовершенствованный изгиб
Настройки Advanced Bending отсоединены, когда в настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Advanced Bending значение параметра Bending vibration analysis method влияет на видимость параметров в настройках Supports. Для получения дополнительной информации смотрите Изгибающийся метод анализа вибрации.
Таблица Advanced Bending Parameter Dependencies показывает, как видимость определенных параметров в настройках Advanced Bending зависит от значений для комбинации параметров в одном или нескольких из этих настроек:
Shaft
Supports
Advanced Bending
Например, параметр Simulated eigenmode dependency on rotation speed отображается, если все эти условия соблюдают:
В настройках Shaft Model bending установлен в On.
В настройках Supports по крайней мере один параметр Mounting type устанавливается на Speed-dependent bearing matrix.
В настройках Advanced Bending Bending vibration analysis method установлен в Eigenmodes.
Зависимости от параметра Advanced Bending
| Установка> Параметр | Заданные значения параметров и зависимый параметры Advanced Bending |
|---|
| > | Off | On |
|---|
| > | - | Любая комбинация Clamped, Pinned, Free, или Bearing matrix | По крайней мере один
Speed-dependent bearing matrix и любая комбинация Clamped, Pinned, Free, или Bearing matrix |
|---|
| Столбцы направо показывают параметры Advanced Bending, которые отображаются для конфигурации модели параметра, показанной в соответствующем столбце в направляющихся строках этой таблицы. | - | Bending vibration analysis method | Bending vibration analysis method |
Lumped mass | Eigenmodes | Lumped mass | Eigenmodes |
| Bending mode determination | Bending mode determination |
Simscape determined | User Defined | Simscape determined | User Defined |
| Limit number of modes | Limit number of modes |
| Simulated eigenmode dependency on rotation speed | Simulated eigenmode dependency on rotation speed |
Static | Dynamic | Static | Dynamic |
| Nominal shaft speed for bending modes | Nominal shaft speed for bending modes |
| Eigenfrequency upper limit | Eigenfrequency upper limit | Eigenfrequency upper limit |
| Shaft length increments for mode shape computations | Shaft length increments for mode shape computations | Shaft length increments for mode shape computations |
| Modal frequencies [m] | Modal frequencies [s, m] | Modal frequencies [s, m] |
| Shaft position [z] | Shaft position [z] | Shaft position [z] |
| X-direction mode shapes [z,m] | X-direction mode shapes [z,m,s] | X-direction mode shapes [z,m,s] |
| Y-direction mode shapes [z,m] | Y-direction mode shapes [z,m,s] | Y-direction mode shapes [z,m,s] |
Bending mode determination — Изгиб метода определения режима
Simscape determined (значение по умолчанию) | User defined
Метод для определения eigenmode частот и форм:
Simscape determined — Simscape определяет режим на основе граничных условий, которые вы задаете.
User defined — Задайте eigenmode частоты и формы непосредственно.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Advanced Bending параметр Bending vibration analysis method устанавливается на Eigenmodes. Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Значение этого параметра влияет на видимость других параметров в настройках Advanced Bending. Для получения дополнительной информации смотрите Монтирующиеся Зависимости от Параметра Типа.
Limit number of modes — Максимальное количество режимов
6
Максимальное количество режимов, которые определяет Simscape.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Advanced Bending параметр Bending vibration analysis method устанавливается на Eigenmodes и параметр Bending mode determination устанавливается на Simscape determined. Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Simulated eigenmode dependency on rotation speed — Зависимость Eigenmode
Static (значение по умолчанию) | Dynamic
Симулированная зависимость eigenmode свойств на скорости вращения вала:
Статический — изгибающийся анализ содержит eigenmode свойства, постоянные во время изменений в скорости вращения вала.
Динамический — изгибающийся анализ настраивает eigenmode свойства как скорость вращения изменений вала. Блок использует элементы в векторе, заданном для параметра Bearing speed [s1,…, sS] как контрольные точки интерполяционной таблицы. Для этой модели относительные величины зависимых скоростью поступательных элементов жесткости не могут измениться на каждой скорости подшипника.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Supports по крайней мере один монтирующийся параметр типа устанавливается на Speed-dependent bearing matrix.
В настройках Advanced Bending параметр Bending vibration analysis method устанавливается на Eigenmodes. Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Nominal shaft speed for bending modes — Номинальная скорость вала
5000 rpm (значение по умолчанию) | скаляр
Расчетная скорость вала для изгибающегося анализа режима.
Зависимости
Этот параметр отображается, если все эти условия соблюдают:
В настройках Shaft параметр Model bending устанавливается на On.
В настройках Supports по крайней мере один монтирующийся параметр типа устанавливается на Speed-dependent bearing matrix.
В настройках Advanced Bending:
Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Eigenfrequency upper limit — Верхний предел собственной частоты
1e8
rpm (значение по умолчанию) | положительный целочисленный скаляр
Верхний предел собственной частоты.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Advanced Bending параметр Bending vibration analysis method устанавливается на Eigenmodes и параметр Bending mode determination устанавливается на Simscape determined. Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Shaft length increments for mode shape computations — Шаг длины вала
0.01 m (значение по умолчанию) | положительная скалярная величина
Шаг длины вала используется в массе режима и расчетах формы. Для получения дополнительной информации см. Изгибающийся Метод Eigenmodes Модели.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Advanced Bending параметр Bending vibration analysis method устанавливается на Eigenmodes и параметр Bending mode determination устанавливается на Simscape determined. Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Modal frequencies [m] — "Перенося скорость независимые" модальные частоты
[280, 644, 615, 1285] rad/s (значение по умолчанию) | неотрицательный вектор
Модальные частоты для скорости подшипника независимая модель. Для получения дополнительной информации см. Изгибающийся Метод Eigenmodes Модели.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Supports никакое монтирование не вводит, установлен в Speed-dependent bearing matrix.
В настройках Advanced Bending:
Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Modal frequencies [s,m] — Зависимые скоростью подшипником модальные частоты
[257, 780, 580, 1560; 280, 644, 615, 1285; 294, 513, 636, 1020] rad/s (значение по умолчанию) | неотрицательная матрица
Модальные частоты для зависимой скоростью подшипником модели. Для получения дополнительной информации см. Изгибающийся Метод Eigenmodes Модели.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Supports по крайней мере один монтирующийся тип установлен в Speed-dependent bearing matrix .
В настройках Advanced Bending:
Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Shaft position [z] — Положение вала
[0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1]
Положение вала для форм режима. Число элементов в векторе соответствует количеству строк в X - направления и Y - формы режима направления. Для получения дополнительной информации см. Изгибающийся Метод Eigenmodes Модели.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
X-direction mode shapes [z,m] — Подшипник скорости независимый X - формы режима направления
[.1648, .0086, -.2759, .0162; .1671, .0093, -.2231, .0133; .1691, .01, -.1689, .0102; .1707, .0105, -.1135, .007; .1717, .0108, -.057, .0035; .1721, .0109, 0, 0; .1717, .0108, .057, -.0035; .1707, .0105, .1135, -.007; .1691, .01, .1689, -.0102; .1671, .0093, .2231, -.0133; .1648, .0086, .2759, -.0162]
X - режим направления формирует матрицу для скорости подшипника независимая модель. Для получения дополнительной информации см. Изгибающийся Метод Eigenmodes Модели.
Матрица должна иметь размерности z-by-m, где:
Матрица формы режима имеет форму [U1x, U2x, …, Umx], где каждый столбец является отклонением формы режима в направлении X для m th режим. Алгоритм вычисляет модальные свойства на основе параметров в настройках Shaft и Bending.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Supports никакой тип монтирования не установлен в Speed-dependent bearing matrix .
В настройках Advanced Bending:
Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
X-direction mode shapes [z,m,s] — Зависимый скоростью подшипником X - формы режима направления
cat(3, [.1842, .0134, -.3072, .0272; .1863, .0152, -.2482, .0226; .1882, .0169, -.1878, .0176; .1897, .0182, -.1261, .0121; .1906, .019, -.0634, .0062; .191, .0193, 0, 0; .1906, .019, .0634, -.0062; .1897, .0182, .1261, -.0121; .1882, .0169, .1878, -.0176; .1863, .0152, .2482, -.0226; .1842, .0134, .3072, -.0272], [.1648, .0086, -.2759, .0162; .1671, .0093, -.2231, .0133; .1691, .01, -.1689, .0102; .1707, .0105, -.1135, .007; .1717, .0108, -.057, .0035; .1721, .0109, 0, 0; .1717, .0108, .057, -.0035; .1707, .0105, .1135, -.007; .1691, .01, .1689, -.0102; .1671, .0093, .2231, -.0133; .1648, .0086, .2759, -.0162], [.1291, .0046, -.2166, .0082; .131, .0048, -.1751, .0067; .1327, .005, -.1327, .0051; .1341, .0052, -.0891, .0035; .135, .0053, -.0448, .0017; .1353, .0053, 0, 0; .135, .0053, .0448, -.0017; .1341, .0052, .0891, -.0035; .1327, .005, .1327, -.0051; .131, .0048, .1751, -.0067; .1291, .0046, .2166, -.0082]) (значение по умолчанию) | матрица
X - режим направления формирует матрицу для зависимой скоростью подшипником модели. Для получения дополнительной информации см. Изгибающийся Метод Eigenmodes Модели.
Матрица должна иметь размерности z-by-m-by-s, где:
z является числом элементов в заданном векторе для параметра Shaft position [z].
m является количеством coplumns в заданном векторе для параметра Modal frequencies [z,m].
s является числом элементов в заданном векторе для параметра Bearing speed [s1,…, sS].
Матрица формы режима имеет кошку форму (3, [U1x1, U2x1, …, Umx1], …, [U1xs, U2xs, …, Umxs]), где каждый столбец является отклонением формы режима в направлении x для m th режим. Каждая страница соответствует элементу в векторе, заданном для параметра Bearing speed [s1,…, sS]. Алгоритм вычисляет модальные свойства на основе параметров в настройках Shaft и Bending.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Supports по крайней мере один монтирующийся тип установлен в Speed-dependent bearing matrix .
В настройках Advanced Bending:
Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Y-direction mode shapes [z,m] — Подшипник скорости независимый Y - формы режима направления
[.1193, -.1784, -.1997, -.3348; .1209, -.1933, -.1615, -.2751; .1224, -.2068, -.1223, -.2119; .1235, -.2176, -.0821, -.1445; .1243, -.2245, -.0413, -.0734; .1246, -.2269, 0, 0; .1243, -.2245, .0413, .0734; .1235, -.2176, .0821, .1445; .1224, -.2068, .1223, .2119; .1209, -.1933, .1615, .2751; .1193, -.1784, .1997, .3348]
Y - режим направления формирует матрицу для скорости подшипника независимая модель. Для получения дополнительной информации см. Изгибающийся Метод Eigenmodes Модели.
Матрица должна иметь размерности z-by-m, где:
Матрица формы режима имеет форму [U1y, U2y, …, Umy], где каждый столбец является отклонением формы режима в направлении Y для m th режим. Алгоритм вычисляет модальные свойства на основе параметров в настройках Shaft и Bending.
Зависимости
Этот параметр отображается, когда оба из этих условий соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Supports никакой тип монтирования не установлен в Speed-dependent bearing matrix .
В настройках Advanced Bending:
Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Y-direction mode shapes [z,m,s] — Зависимый скоростью подшипником y - формы режима направления
cat(3, [.0885, -.1625, -.1475, -.3301; .0895, -.1847, -.1192, -.2745; .0904, -.2048, -.0902, -.2141; .0911, -.2209, -.0606, -.1475; .0916, -.2313, -.0304, -.0754; .0917, -.2349, 0, 0; .0916, -.2313, .0304, .0754; .0911, -.2209, .0606, .1475; .0904, -.2048, .0902, .2141; .0895, -.1847, .1192, .2745; .0885, -.1625, .1475, .3301], [.1193, -.1784, -.1997, -.3348; .1209, -.1933, -.1615, -.2751; .1224, -.2068, -.1223, -.2119; .1235, -.2176, -.0821, -.1445; .1243, -.2245, -.0413, -.0734; .1246, -.2269, 0, 0; .1243, -.2245, .0413, .0734; .1235, -.2176, .0821, .1445; .1224, -.2068, .1223, .2119; .1209, -.1933, .1615, .2751; .1193, -.1784, .1997, .3348], [.1566, -.1901, -.2628, -.3377; .1589, -.1994, -.2125, -.2753; .161, -.2079, -.1609, -.2103; .1627, -.2146, -.1081, -.1424; .1638, -.219, -.0544, -.0719; .1642, -.2205, 0, 0; .1638, -.219, .0544, .0719; .1627, -.2146, .1081, .1424; .161, -.2079, .1609, .2103; .1589, -.1994, .2125, .2753; .1566, -.1901, .2628, .3377]) (значение по умолчанию) | матрица
Y - режим направления формирует матрицу для зависимой скоростью подшипником модели. Для получения дополнительной информации см. Изгибающийся Метод Eigenmodes Модели.
Матрица должна иметь размерности z-by-m-by-s, где:
z является числом элементов в заданном векторе для параметра Shaft position [z].
m является количеством столбцов в заданном векторе для параметра Modal frequencies [z,m].
s является числом элементов в заданном векторе для параметра Bearing speed [s1,…, sS].
Матрица формы режима имеет кошку форму (3, [U1y1, U2y1, …, Umy1], …, [U1ys, U2ys, …, Umys]), где каждый столбец является отклонением формы режима в направлении y для m th режим. Каждая страница соответствует элементу в векторе, заданном для параметра Bearing speed [s1,…, sS]. Алгоритм вычисляет модальные свойства на основе параметров в настройках Shaft и Bending.
Зависимости
Этот параметр отображается, когда все эти условия соблюдают:
В настройках Shaft параметр Model bending устанавливается на On. Для получения дополнительной информации смотрите изгиб Модели.
В настройках Supports по крайней мере один монтирующийся тип установлен в Speed-dependent bearing matrix .
В настройках Advanced Bending:
Для получения дополнительной информации смотрите Усовершенствованные Зависимости от Параметра Изгиба.
Ссылки
[1] Адамс, M.L. Вращение вибрации машинного оборудования. КРК-Пресс, Нью-Йорк: 2010.
[2] Купайтесь, K. J. Процедуры конечного элемента. Prentice Hall, 1996.
[5] Muszynska, А. Ротординэмикс. Taylor & Francis, 2005
[6] Рао, вибрация судна непрерывных систем. Хобокен, NJ: John Wiley & Sons, 2007.
Введенный в R2018b