Кинематическое ограничение между телом переводящей рейки и телом вращающейся шестерни
Simscape / Мультитело / Механизмы и Связи / Механизмы

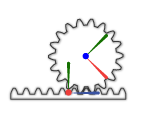
Блок Rack and Pinion Constraint представляет кинематическое ограничение между телом переводящей рейки и телом вращающейся шестерни. Порт базовой системы координат идентифицирует систему координат связи на корпусе шестерни, и порт системы координат последователя идентифицирует систему координат связи на теле стойки. Ось вращения шестерни и ось перевода стойки совпадают с системой координат z - оси.
Блок представляет только кинематическую ограничительную характеристику системе реечного механизма. Инерция механизма и геометрия являются твердыми свойствами, что необходимо задать блоки тела использования. Ограничительная модель механизма идеальна. Обратная реакция и потери механизма из-за кулонового и вязкого трения между зубами проигнорированы. Можно, однако, смоделировать вязкое трение в соединениях путем определения затухания коэффициентов в блоках соединений.
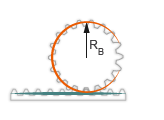
Ограничение реечного механизма параметризовано в терминах размерностей круга подачи шестерни. Круг подачи является мнимым кругом, концентрическим с корпусом шестерни и касательной к зубной контактной точке. Радиус подачи, пометил RB в фигуре, радиус, который имела бы шестерня, если бы это уменьшалось до цилиндра трения в контакте с кирпичным приближением стойки.
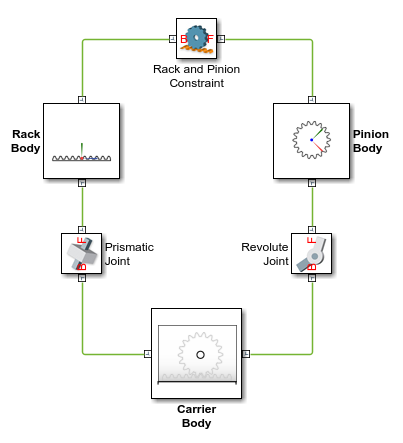
Ограничения механизма происходят в закрытых кинематических замкнутых цепях. Рисунок показывает топологию с обратной связью простой модели реечного механизма. Блоки соединений соединяют стойку и связывают тела к общему фиксатору или поставщику услуг, задавая максимальные степени свободы между ними. Блок Rack and Pinion Constraint соединяет стойку и корпуса шестерни, устраняя одну степень свободы и эффективно связывая движения шестерни и стойка.
Блок вводит специальные ограничения для относительных положений и ориентаций систем координат связи механизма. Ограничения гарантируют, что механизмы собираются только на расстояниях и углах, подходящих для того, чтобы сцепиться. Блок осуществляет ограничения во время сборки блока, когда это сначала пытается поместить механизмы в mesh, но использует остаток от модели, чтобы сохранить механизмы в mesh в процессе моделирования.
Ограничения положения
Расстояние между основой и системами координат последователя вдоль последователя структурирует y - ось должна равняться радиусу шестерни. Это ограничение гарантирует, что точка подачи стойки на соответствующем расстоянии от оси вращения шестерни.
Система координат последователя должна лечь на плоскость xy базовой системы координат. Это ограничение гарантирует, что точка подачи стойки является компланарной с кругом подачи шестерни.
Ограничения ориентации
x - ось системы координат последователя должна быть перпендикулярна плоскости xy базовой системы координат. Это ограничение гарантирует, что стойка и шестерня являются компланарными, и поэтому что их оси движения перпендикулярны друг другу.
Bevel Gear Constraint | Common Gear Constraint | Worm and Gear Constraint
