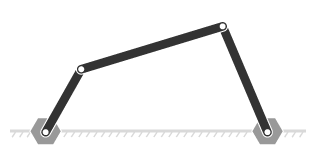
В этом примере показано, как смоделировать четырёхзвенник — закрытая кинематическая цепь, включающая четыре тела то подключение через шарнирные соединения. Одна из ссылок фиксируется к лабораторной системе координат и действует как земля. Эта ссылка заменяется здесь двумя центрами, монтируется соединенный посредством твердого перевода, преобразовывают. Пользовательский smdoc_compound_rigid_bodies библиотека обеспечивает блоки подсистемы тела, используемые в примере.
Блоки Revolute Joint позволяют вам смоделировать соединения, соединяющие смежные тела, и справка установила их начальные состояния. Программное обеспечение Simscape™ Multibody™ удовлетворяет объединенной цели состояния точно, если это кинематическим образом допустимо а не в конфликте с другими целями состояния. Параметр Priority позволяет вам задать который цели попытаться удовлетворить сначала.
Смоделировать четырёхзвенник:
Запустите новую модель.
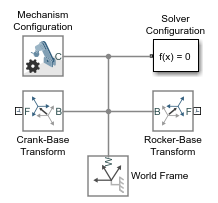
Перетащите эти блоки к модели. Блоки Твердого Преобразования указывают, что расстояние между двумя центрами монтируется. Это расстояние является длиной неявной наземной ссылки.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape> Utilities | Solver Configuration | 1 |
| Simscape> Multibody> Utilities | Mechanism Configuration | 1 |
| Simscape> Multibody> Frames and Transforms | World Frame | 1 |
| Simscape> Multibody> Frames and Transforms | Rigid Transform | 2 |
Соедините и назовите блоки как показано в фигуре. Порты базовой системы координат блоков Твердого Преобразования должны соединиться с блоком World Frame.
От библиотеки Simscape> Multibody> Joints перетащите четыре блока Revolute Joint в модель.
В командной строке MATLAB® введите smdoc_compound_rigid_bodies. Пользовательская библиотека с составными блоками подсистемы тела открывается.
От smdoc_compound_rigid_bodies библиотека, перетащите следующие блоки.
| Блок | Количество |
|---|---|
| Центр монтируется | 2 |
| Бинарная ссылка A | 2 |
| Бинарная ссылка B | 1 |
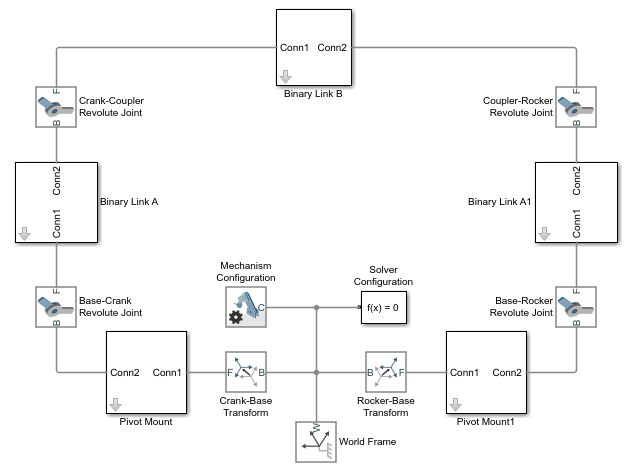
Соедините и назовите блоки как показано в фигуре. Необходимо расположить порты системы координат пользовательских блоков подсистемы тела точно как показано.
В диалоговых окнах блока Твердого Преобразования укажите, что перемещение между центром монтируется и мировая система координат. Монтирование центра принято, чтобы быть симметрично расположенным об этой системе координат.
| Параметр | Основное заводной рукояткой преобразование | Основное рокером преобразование |
|---|---|---|
| Translation> Method | Standard Axis | Standard Axis |
| Translation> Axis | -Y | +Y |
| Translation> Offset | 15cm | 15cm |
В каждом бинарном диалоговом окне блока ссылки задайте параметр длины.
| Блок | Длина (cm) |
|---|---|
| Бинарная ссылка A | 10 |
| Бинарная ссылка B | 35 |
| Бинарная ссылка A1 | 20 |
Ведите сборку блока путем определения желаемого начального состояния для одного или нескольких соединений в модели. Задавать начальный угол 30 ° для соединения Основной Заводной рукоятки:
В диалоговом окне блока Revolute Joint Основной Заводной рукоятки расширьте State Targets и выберите Specify Position Target.
В Value введите -30 и нажмите OK.
Во вкладке Modeling нажмите Update Model.
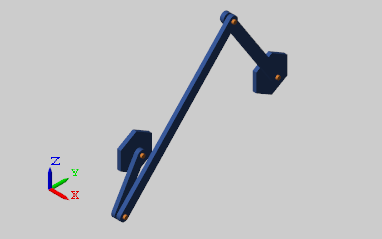
Mechanics Explorer открывается статическим отображением четырёхзвенника в его начальной настройке. Если положения шарниров, которые вы задали, допустимы и совместимы, начальная настройка совпадает с теми целями состояния точно.
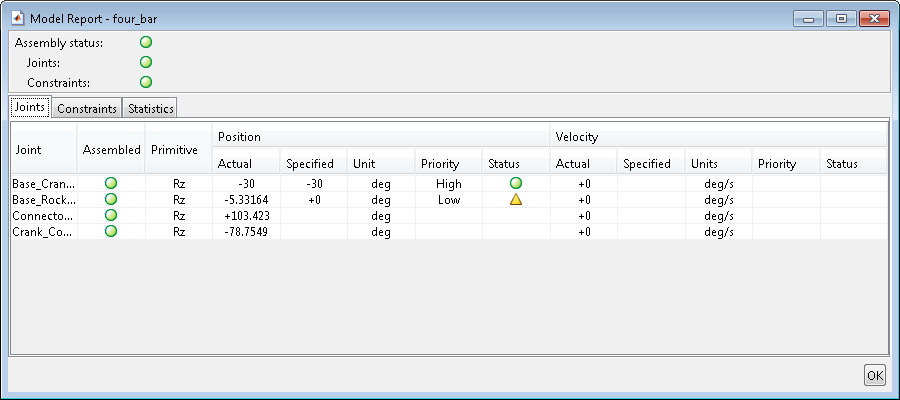
Проверять, можно ли — и как точно — ваши цели состояния были достигнуты, использовать Средство просмотра Переменной Simscape или Отчет Модели Simscape Multibody.
Чтобы открыть Средство просмотра Переменной Simscape, в галерее Apps, нажимают Simscape Variable Viewer. Чтобы открыть Отчет Модели Simscape Multibody, обновите схему и, в панели меню Mechanics Explorer, выберите Tools> Model Report.
Рисунок показывает пример Отчета Модели. Желтый маркер указывает, что цели состояния Шарнирного соединения Основного Рокера удовлетворили приблизительно только. Остающийся зеленый маркер указывает, что остающейся цели состояния удовлетворили точно.
Запустите симуляцию. Mechanics Explorer показывает 3-D анимацию блока четырёхзвенника. Блок перемещается из-за силы тяжести, заданной в блоке Mechanism Configuration.
Чтобы видеть полную модель блока четырёхзвенника, в командной строке MATLAB, войдите:
smdoc_four_bar
