Реализуйте PI текущие модели контроллеров для машины DC
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Основные Блоки Диска
Блок Current Controller (DC) моделирует PI текущий контроллер для использования с машиной DC. Блок имеет несколько экземпляров, в зависимости от типа дисков DC (диск DC прерывателя или основанный на тиристоре диск DC) и операционные квадранты (один - 2D, или с четырьмя квадрантами). Это имеет два рабочих режима, чтобы представлять подробное или среднее значение текущий контроллер.
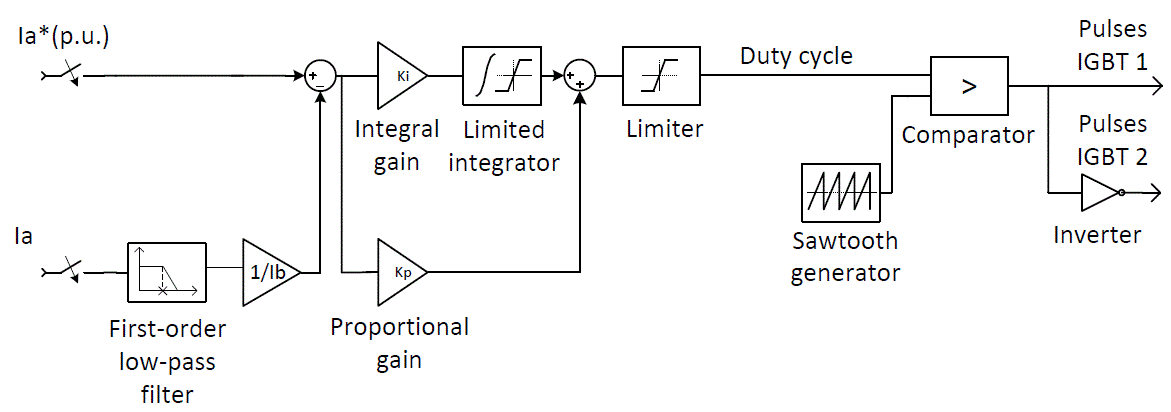
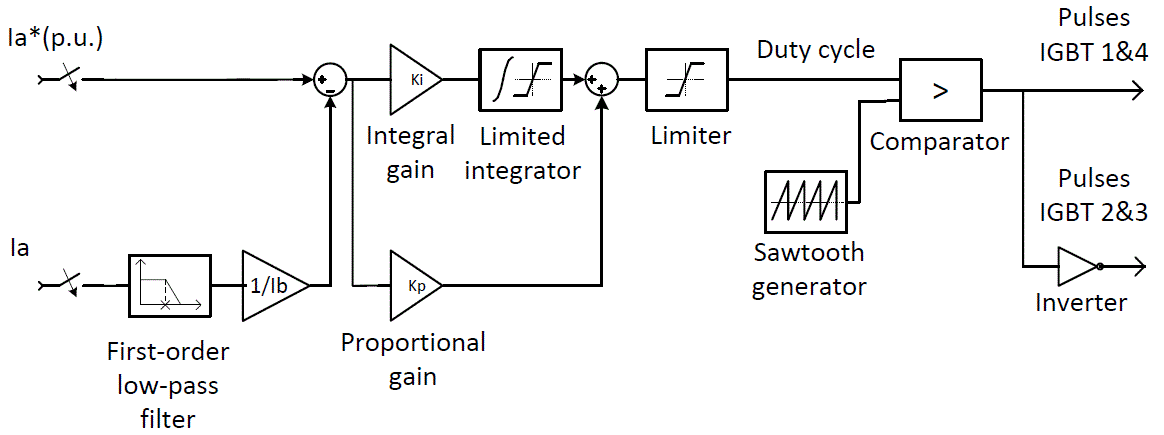
Рисунок показывает модели подробного блока Current Controller (DC) для одного - 2D, и диски DC прерывателя с четырьмя квадрантами, соответственно.
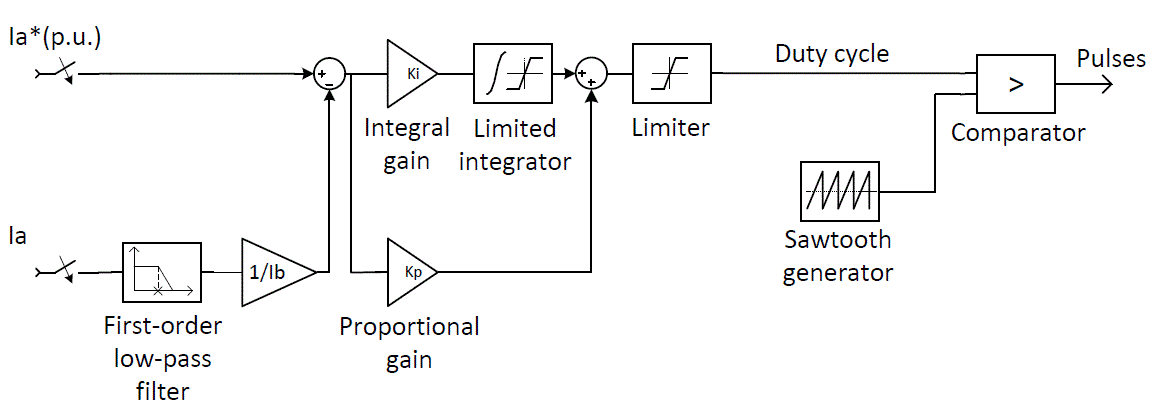
Входные параметры блока DC current controller являются текущей ссылкой (в pu) и арматура текущее течение через двигатель. Текущая ссылка обычно обеспечивается контроллером крутящего момента или скоростью. Арматура текущий вход отфильтрована фильтром lowpass первого порядка.
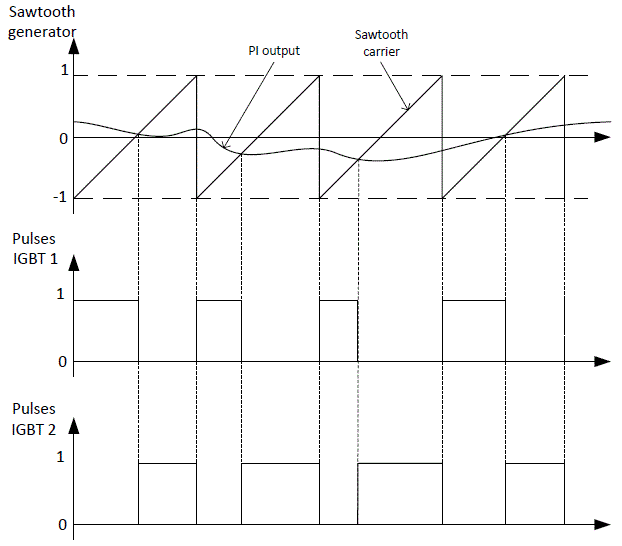
Рабочий цикл прерывателя вычисляется с регулятором PI. Рабочий цикл по сравнению с пилообразным сигналом поставщика услуг фиксированной частоты получить необходимые импульсы логического элемента (PWM) для устройств прерывателя (IGBT 1 и IGBT 2). Рисунок показывает генерацию сигнала PWM для 2D квадрантного диска DC прерывателя.
Модель Average Current Controller (DC) обычно используется с моделями прерывателя DC среднего значения, где высокочастотные действия переключения выключателей питания не представлены.
Блок Average Current Controller (DC) похож на подробную модель. Однако нет никакой генерации сигнала PWM. Выход блока Average Current Controller (DC) является рабочим циклом IGBTs. Для 2D квадрантной операции два рабочих цикла вычисляются для IGBT 1 и IGBT 2. Для операции с четырьмя квадрантами два рабочих цикла вычисляются для IGBT 1 и IGBT 4 и для IGBT2 и IGBT 3.
Для дисков DC прерывателя, блок выходные параметры фактические импульсы (подробный режим) или рабочий цикл (средний режим) для прерывателя DC.
Для основанных на тиристоре дисков DC блок Current Controller (DC) выводит угол увольнения для тиристорного мостовой преобразователя. Рисунок показывает модели для 2D квадранта и основанного на тиристоре диска DC с четырьмя квадрантами.
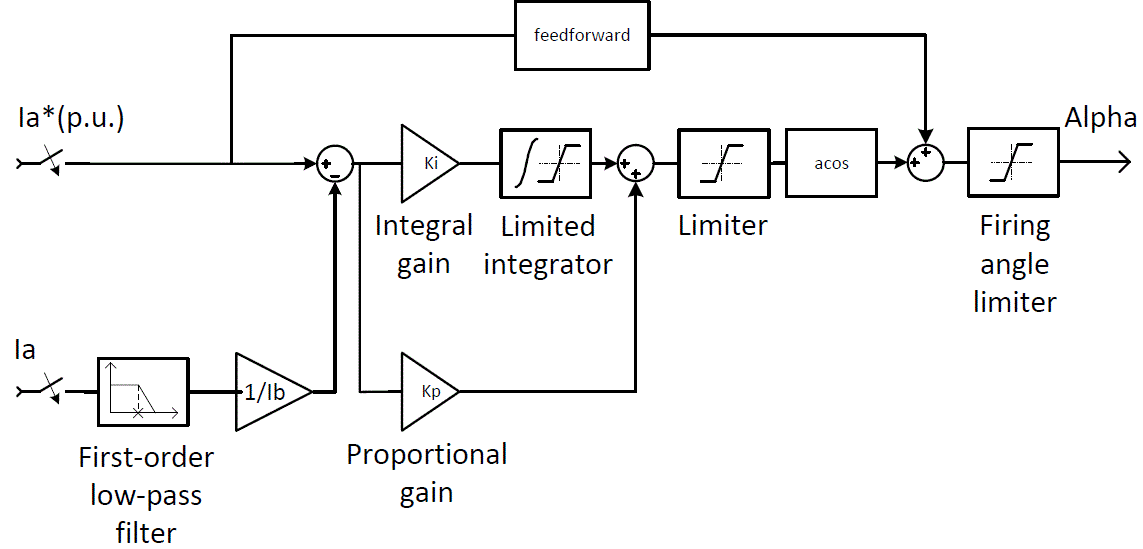
Регулятор PI вычисляет соответствующий угол увольнения для тиристорного моста. Для 2D квадрантной операции термин feedforward добавляется к углу увольнения, чтобы компенсировать нелинейность, появляющуюся во время прерывистой проводимости.
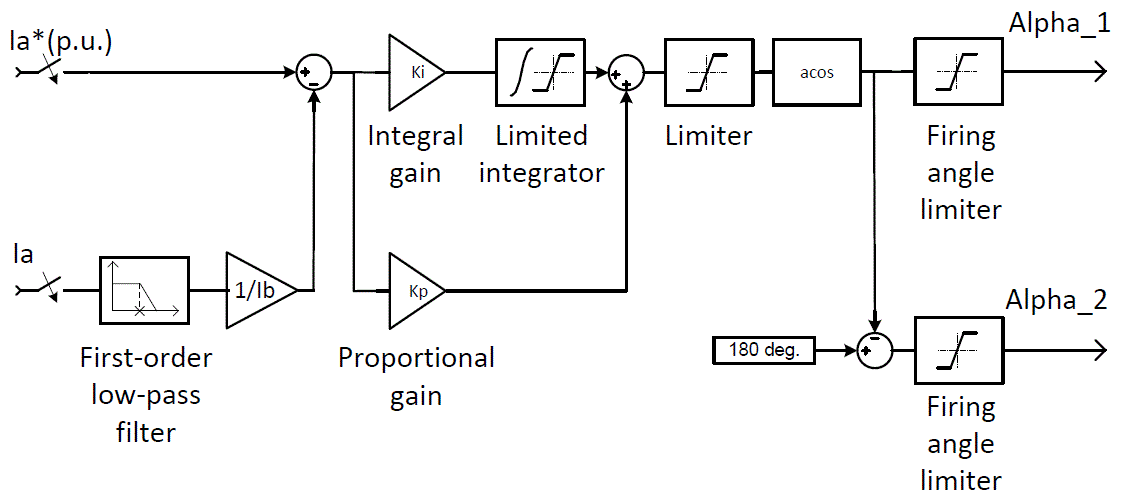
Для основанных на тиристоре дисков с четырьмя квадрантами, контроллера постоянного тока выходные параметры два угла увольнения (Alpha_1 и Alpha_2) для двух антисравненных тиристорных мостов. Сумма углов увольнения является 180 градусами в любом случае. Эта установка гарантирует противоположные средние напряжения в каждом DC конвертера терминал выхода и обеспечивает идентичные средние напряжения в арматуре двигателя постоянного тока.
Задайте тип дисков, чтобы использовать:
Chopper based (значение по умолчанию)
Rectifier based
Выберите между подробным и моделью среднего значения. Этот параметр доступен только, когда параметр Drive type устанавливается на Chopper based.
Выберите одно из этих значений:
Detailed (значение по умолчанию)
Average
Задайте количество операционных квадрантов, чтобы использовать. Выберите между 1, 2, и 4.
Значением по умолчанию является 2.
Основная степень в амперах вольта машины DC, обычно эквивалентной номинальной степени. Значением по умолчанию является 5*746.
Базовое напряжение в вольтах машины DC, обычно эквивалентной номинальному напряжению. Значением по умолчанию является 240.
ПИ-контроллер пропорциональное усиление. Значением по умолчанию является 2.
Усиление интеграла ПИ-контроллера. Значением по умолчанию является 200.
Частота среза, в герц, фильтра lowpass раньше фильтровала арматуру текущее измерение. Значением по умолчанию является 500.
Переключающаяся частота, в герц, прерывателя DC. Этот параметр доступен только, когда параметр DC drive type устанавливается на Chopper based и параметр Detail level устанавливается на Detailed.
Значением по умолчанию является 5e3.
Нижние и верхние пределы угла увольнения, в градусах. Этот параметр доступен только, когда параметр Drive type устанавливается на Rectifier based. Значением по умолчанию является [20, 160].
Текущее время выборки контроллера, в секундах. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 20e-6.
Временной шаг используется в симуляции в секундах. Значением по умолчанию является 1e-6.
laИзмеренная арматура, текущая (A).
la*(pu)Арматура текущая ссылка в на модуль, обычно обеспеченном контроллером скорости/крутящего момента.
d_iАрматура текущая ссылочная ошибка (различие между ссылкой и текущей настоящей машиной).
la*Арматура текущая ссылка (A).
PulseСигнал импульса PWM требуется прерывателем DC с одним квадрантом. Этот порт отображается только, когда параметр Drive type устанавливается на Chopper based, параметр Model detail level устанавливается на Detailed, и параметр Number of quadrants устанавливается на 1.
PulsesСигнал импульса PWM требуется 2D квадрантным прерывателем DC или прерывателем DC с четырьмя квадрантами. Этот порт отображается только, когда параметр Drive type устанавливается на Chopper based, параметр Model detail level устанавливается на Detailed, и параметр Number of quadrants устанавливается на 2 или 4.
DcycleРабочий цикл требуется прерывателем DC с одним квадрантом. Этот порт отображается только, когда параметр Drive type устанавливается на Chopper based, параметр Model detail level устанавливается на Average, и параметр Number of quadrants устанавливается на 1.
DcyclesРабочие циклы требуются 2D квадрантным прерывателем DC или прерывателем DC с четырьмя квадрантами. Этот порт отображается только, когда параметр Drive type устанавливается на Chopper based, параметр Model detail level устанавливается на Average, и параметр Number of quadrants устанавливается на 2 или 4.
AlphaУгол увольнения требуется тиристорным мостом с одним квадрантом или 2D квадрантным тиристорным мостовой преобразователем. Этот порт отображается только, когда параметр Drive type устанавливается на Thyristor based и параметр Number of quadrants устанавливается на 1 или 2.
Alpha_1Угол увольнения требуется первым антисравненным тиристорным мостом в диске DC с четырьмя квадрантами. Этот порт отображается только, когда параметр Drive type устанавливается на Thyristor based и параметр Number of quadrants устанавливается на 4.
Alpha_2Угол увольнения требуется вторым антисравненным тиристорным мостом в диске DC с четырьмя квадрантами. Этот порт отображается только, когда параметр Drive type устанавливается на Thyristor based и параметр Number of quadrants устанавливается на 4.
Блок Current Controller (DC) используется в DC1 к блокам DC7 из библиотеки Electric Drives.
[1] Bose, B. K. Современная силовая электроника и диски AC, NJ: Prentice Hall, 2002.
Bridge Firing Unit (AC) | Bridge Firing Unit (DC) | Current Controller (Brushless DC) | Direct Torque Controller | Field-Oriented Controller | Regulation Switch | Six-Step Generator | Space Vector Modulator | Speed Controller (AC) | Speed Controller (DC) | Speed Controller (Scalar Control) | Vector Controller (PMSM) | Vector Controller (WFSM) | Voltage Controller (DC Bus)
