Реализуйте прямой крутящий момент и контроллер потока (DTFC или DTC) модель
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Основные Блоки Диска
Прямой контроллер Крутящего момента и Потока (DTC) непосредственно управляет крутящим моментом и потоком статора машины, с помощью векторов напряжения инвертора, обычно выбранных из оптимальной таблицы переключения. Для объяснения смотрите Прямое Управление Крутящим моментом.
Прямой контроллер крутящего момента (DTC) создается с двумя типами модуляции, гистерезисной модуляции и модуляции вектора пробела (SVM). Следующие фигуры представляют блок-схему контроллера для двух типов модуляции.
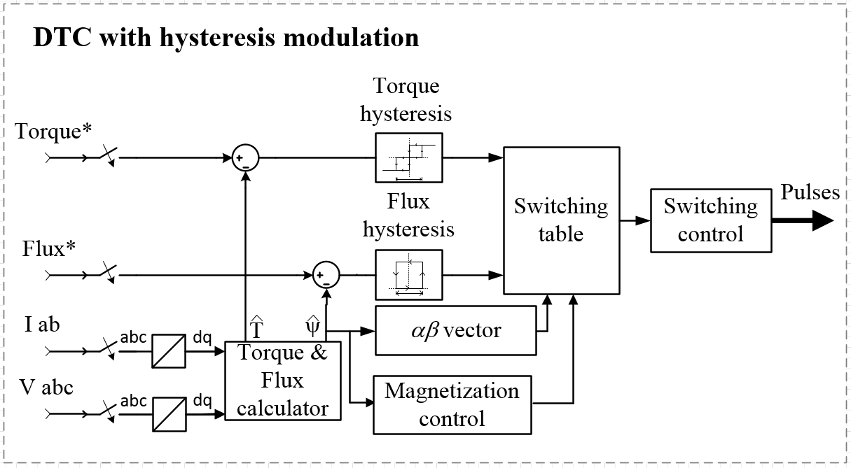
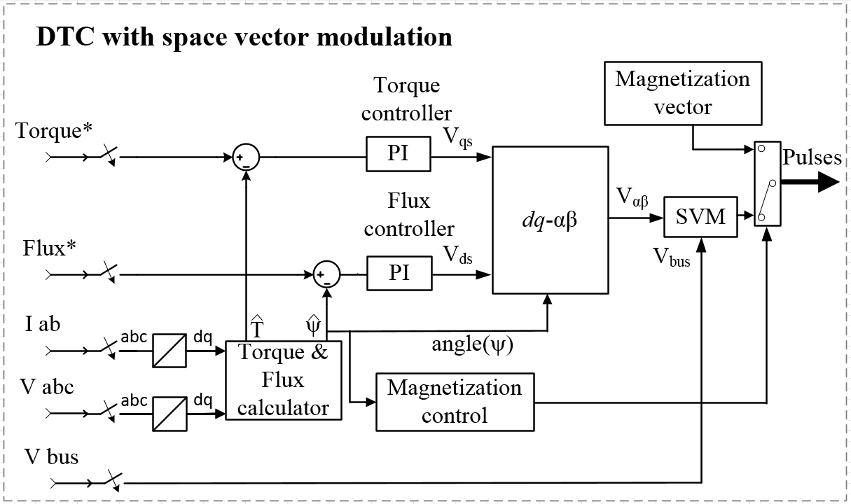
Блок Torque & Flux calculator оценивает моторный поток αβ компоненты и электромагнитный крутящий момент. Этот калькулятор основан на моторном синтезе уравнения.
Блок управления намагничивания содержит логику для переключения между режимами намагничивания и нормального функционирования.
Блок Flux Sector Seeker находит сектор αβ плоскости, в которой находится вектор потока. αβ плоскость разделена на шесть различных секторов, расположенных с интервалами 60 градусами.
Блок Flux & Torque Hysteresis содержит двухуровневый гистерезисный компаратор для управления потоком и трехуровневый гистерезисный компаратор для управления крутящим моментом.
Блок Switching Table содержит две интерполяционных таблицы, которые выбирают определенный вектор напряжения в соответствии с выходом потока и закручивают гистерезисные компараторы. Этот блок также производит начальный поток в машине.
Блок Switching Control ограничивает частоту коммутации инвертора максимальным значением, которое вы задаете.
Torque PI и блоки Flux PI являются пропорционально-интегральными регуляторами. Электромагнитный крутящий момент, которым управляют, и управлял, чтобы амплитуды потока статора были по сравнению с предполагаемыми фактическими значениями крутящего момента и потока. Крутящий момент и ошибки потока питаются ПИ-контроллеры. Выходные сигналы являются компонентами напряжения статора, которыми управляют, Vqs и Vds, соответственно.
Блок Vector Sector используется, чтобы найти сектор αβ плоскости, в которой находится вектор напряжения. αβ плоскость разделена на шесть различных секторов, расположенных с интервалами 60 градусами.
Блок Ramp Generator используется, чтобы произвести унитарный пандус в PWM переключающаяся частота. Этот пандус используется в качестве основы времени для переключающейся последовательности.
Блок Switching Time Calculator используется, чтобы вычислить, синхронизация вектора напряжения применилась к двигателю. Вход блока является сектором, в котором находится вектор напряжения.
Блок Gates Logic получает последовательность синхронизации от блока Switching Time Calculator и пандус от блока Ramp Calculator. Этот блок сравнивает пандус и сигналы синхронизации логического элемента активировать переключатели инвертора в свое время.
Выберите гистерезис или модуляцию вектора пробела. Значением по умолчанию является Hysteresis.
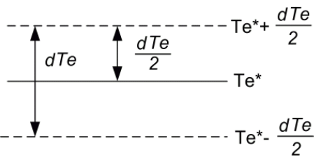
Пропускная способность гистерезиса крутящего момента, в ньютон-метрах. Это значение является общей пропускной способностью, распределенной симметрично вокруг сетбола крутящего момента. Рисунок показывает случай, где сетболом крутящего момента является Те*, и пропускная способность гистерезиса крутящего момента установлена в dTe. Этот параметр включен только, когда параметр Modulation type устанавливается на Hysteresis. Значением по умолчанию является 0.5.
Контроллер крутящего момента пропорциональное усиление. Этот параметр включен только, когда параметр Modulation type устанавливается на SVM. Значением по умолчанию является 1.5.
Контроллер крутящего момента интегральное усиление. Этот параметр включен только, когда параметр Modulation type устанавливается на SVM. Значением по умолчанию является 100.
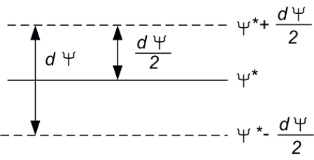
Пропускная способность гистерезиса потока статора, в webers. Это значение является общей пропускной способностью, распределенной симметрично вокруг сетбола потока. Рисунок показывает случай, где сетбол потока является ψ*, и пропускная способность гистерезиса крутящего момента установлена в dψ. Этот параметр включен только, когда параметр Modulation type устанавливается на Hysteresis. Значением по умолчанию является 0.01.
Контроллер потока пропорциональное усиление. Этот параметр включен только, когда параметр Modulation type устанавливается на SVM. Значением по умолчанию является 250.
Контроллер потока интегральное усиление. Этот параметр включен только, когда параметр Modulation type устанавливается на SVM. Значением по умолчанию является 4000.
Шаг расчета прямого контроллера крутящего момента, в секундах. Значением по умолчанию является 20e-6.
Время выборки контроллера, в секундах. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 1e-6.
Максимальная частота переключения инвертора, в герц. Значением по умолчанию является 20000.
Фиксированная частота переключения инвертора, в герц. Этот параметр включен только, когда параметр Modulation type устанавливается на SVM. Значением по умолчанию является 20000.
Частота среза фильтра lowpass первого порядка применилась к измерению напряжения на шине DC в герц. Этот параметр включен только, когда параметр Modulation type устанавливается на SVM. Значением по умолчанию является 50.
Сопротивление статора, в Омах. Значением по умолчанию является 0.435.
Начальный статор течет для машины в webers. Значением по умолчанию является 0.3.
Количество пар полюса. Значением по умолчанию является 2.
Torque*Ссылка крутящего момента, обычно обеспеченная контроллером скорости.
Flux*Ссылка потока, обычно обеспеченная контроллером скорости.
V_abcТрехфазные напряжения машины индукции.
I_abТоки линии Ia и Ib машины индукции.
MagCЭтот двоичный сигнал указывает, намагничена ли машина достаточно, чтобы быть запущенной (1) или не (0).
GatesИмпульсы для шести переключателей инвертора.
Блок Direct Torque Controller используется в блоке AC4 библиотеки Electric Drives.
[1] Bose, B. K. Современная силовая электроника и диски AC. NJ: Prentice Hall, 2002.
Bridge Firing Unit (AC) | Bridge Firing Unit (DC) | Current Controller (Brushless DC) | Current Controller (DC) | Field-Oriented Controller | Regulation Switch | Six-Step Generator | Space Vector Modulator | Speed Controller (AC) | Speed Controller (DC) | Speed Controller (Scalar Control) | Vector Controller (PMSM) | Vector Controller (WFSM) | Voltage Controller (DC Bus)
