Визуализируйте UAV сегмент пути Dubins
axHandle = show(pathSegObj)
Графический вывод использования только положение и угол отклонения от курса.
axHandle = show(pathSegObj,Name,Value)
В этом примере показано, как вычислить сегмент пути Dubins UAV и положения подключения с помощью uavDubinsConnection объект.
Создайте uavDubinsConnection объект.
connectionObj = uavDubinsConnection;
Задайте запускаются, и цель изображает из себя [xYZ, headingAngleВекторы.
startPose = [0 0 0 0]; % [meters, meters, meters, radians]
goalPose = [0 0 20 pi];Вычислите допустимый сегмент пути и соедините положения. Возвращает объект сегмента пути с самой низкой стоимостью пути.
[pathSegObj,pathCosts] = connect(connectionObj,startPose,goalPose);
Покажите сгенерированный путь.
show(pathSegObj{1})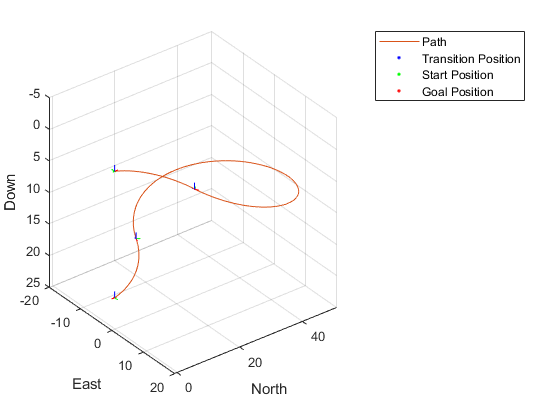
Отобразите тип движения и стоимость пути сгенерированного пути.
fprintf('Motion Type: %s\nPath Cost: %f\n',strjoin(pathSegObj{1}.MotionTypes),pathCosts);Motion Type: R L R N Path Cost: 138.373157
