Вычислите H-бесконечность оптимальный контроллер
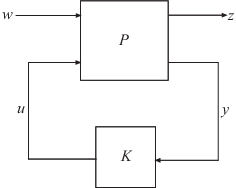
[ вычисляет стабилизировавшийся H ∞-optimal контроллер K,CL,gamma] = hinfsyn(P,nmeas,ncont)K для объекта P. Объект имеет разделенную форму
где:
w представляет входные параметры воздействия.
u представляет входные параметры управления.
z представляет ошибку выходные параметры, которые будут сохранены маленьким.
y представляет измерение выходные параметры, предоставленные контроллеру.
nmeas и ncont количество сигналов в y и u, соответственно. y и u являются последние выходные параметры и входные параметры P, соответственно. hinfsyn возвращает контроллер K это стабилизирует P и имеет то же количество состояний. Система с обратной связью CL = lft(P,K) достигает уровня производительности gamma, который является H ∞ норма CL (см. hinfnorm).
[ вычисляет контроллер для целевого уровня производительности K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamTry)gamTry. Определение gamTry может быть полезным, когда оптимальная производительность контроллера лучше, чем вам нужно для вашего приложения. В этом случае меньше оптимальный контроллер может иметь меньшие усиления и быть более численно хорошо подготовлен. Если gamTry не достижимо, hinfsyn возвращается для K и CL, и Inf для gamma.
[ ищет область значений K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamRange)gamRange для лучшей достижимой производительности. Укажите диапазон с вектором формы [gmin,gmax]. Ограничение поисковой области значений может ускорить расчет путем сокращения количества итераций, выполняемых hinfsyn протестировать различные уровни производительности.
[ задает дополнительные опции расчета. Создать K,CL,gamma] = hinfsyn(___,opts)opts, используйте hinfsynOptions. Задайте opts после всех других входных параметров.
Синтезируйте контроллер, использующий различные целевые уровни производительности. Объект в этом примере основан на увеличенной модели объекта управления, используемой в Устойчивом Управлении Активной Приостановки. Загрузите объект.
load hinfsynExData P size(P)
State-space model with 5 outputs, 4 inputs, and 9 states.
Этот объект имеет пять выходных параметров и четыре входных параметров, где последние два выходных параметров являются сигналами измерения обеспечить контроллеру, и последний вход является управляющим сигналом. Вычислите - оптимальный контроллер.
ncont = 1; nmeas = 2; [K1,CL,gamma] = hinfsyn(P,nmeas,ncont);
Получившийся 2D вход, у контроллера с одним выходом есть то же количество состояний как P.
size(K1)
State-space model with 1 outputs, 2 inputs, and 9 states.
Оптимальный уровень производительности, достигнутый этим контроллером, возвращен как gamma. Это значение норма системы с обратной связью CL.
gamma
gamma = 0.9405
Можно исследовать график сингулярного значения системы с обратной связью подтвердить, что ее самое большое сингулярное значение не превышает gamma.
sigma(CL,ss(gamma)) ylim([-120,20]);

Для контроллеров, которые являются близко к оптимальной производительности, усиления контроллера могут иногда становиться большими. Если вы знаете, что ваше приложение не требует оптимального достижимого уровня производительности, можно ограничить область значений значения, что hinfsyn тесты. Предположим, что вы знаете это достаточно хорошо для вашего приложения. Используя тот же объект как в диспетчере H-бесконечности в качестве примера Синтезисе, вычислите контроллер, использующий целевую область значений производительности [1.4 1.6]. Включите отображение, чтобы видеть прогресс расчета.
load hinfsynExData P ncont = 1; nmeas = 2; opts = hinfsynOptions('Display','on'); gamRange = [1.4 1.6]; [K,CL,gamma,info] = hinfsyn(P,nmeas,ncont,gamRange,opts);
Test bounds: 1.4 <= gamma <= 1.6 gamma X>=0 Y>=0 rho(XY)<1 p/f 1.60e+00 4.9e-07 0.0e+00 1.462e-02 p 1.50e+00 5.0e-07 0.0e+00 1.681e-02 p 1.45e+00 5.0e-07 0.0e+00 1.803e-02 p 1.42e+00 5.0e-07 1.7e-20 1.868e-02 p 1.41e+00 5.0e-07 0.0e+00 1.902e-02 p Best performance (actual): 0.946
Отображение показывает все уровни производительности, протестированные hinfsyn. В этом случае все протестированные уровни производительности проходят тесты что hinfsyn запрашивает устойчивость с обратной связью (см. Алгоритмы). Несмотря на то, что самый маленький протестированный уровень 1.41, контроллер, возвращенный для того значения, достигает фактического уровня производительности gamma, который является приблизительно 0,95. Самый маленький протестированный уровень возвращен в gamma поле info структура.
info.gamma
ans = 1.4117
При попытке получить уровень производительности, который не достижим ни с каким контроллером, отображение сообщает вам, что цель слишком мала и возвращает пустой контроллер и систему с обратной связью. Например, предположите, что вы пытаетесь достигнуть уровня производительности 0,75.
gamTry = 0.75
gamTry = 0.7500
[K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamTry,opts)
Specified upper limit GMAX=0.75 is too small, needs to be greater than 0.94.
K =
[]
CL =
[]
gamma = Inf
Спроектируйте контроллер смешанной чувствительности для следующего объекта, увеличенного следующими формирующий фильтрами цикла (см. mixsyn).
Задайте объект, взвесив фильтры и увеличенный объект.
s = zpk('s');
G = (s-1)/(s+1);
W1 = 0.1*(s+100)/(100*s+1);
W2 = 0.1;
W3 = [];
P = augw(G,W1,W2,W3);Синтезируйте контроллер.
[K,CL,gamma] = hinfsyn(P,1,1); gamma
gamma = 0.1831
Для этой системы, gamma приблизительно 0,18, или приблизительно-15 дБ.
Исследуйте сингулярные значения результата с обратной связью.
sigma(CL,ss(gamma))

Вычислите новый контроллер для той же системы без .
W1 = []; P = augw(G,W1,W2,W3); [K,CL,gamma] = hinfsyn(P,1,1);
В этом случае, получившийся контроллер K нуль и передаточная функция с обратной связью CL = K*(1+G*K) также нуль.
K — Контроллерss объект модели | []Контроллер, возвращенный как пространство состояний (ss) объект модели или []. Контроллер стабилизирует P и имеет то же количество состояний как P. У контроллера есть nmeas входные параметры и ncont выходные параметры .
Если вы предоставляете gamTry или gamRange и заданные значения производительности не достижимы, затем K = [].
CL — Передаточная функция с обратной связьюss объект модели | []Передаточная функция с обратной связью, возвращенная как пространство состояний (ss) объект модели или []. Передаточная функция с обратной связью дана CL = lft(P,K) как в следующей схеме.
Возвращенный уровень производительности gamma H ∞ норма CL.
Если вы предоставляете gamTry или gamRange и заданные уровни производительности не достижимы, затем CL = [].
gamma — Производительность контроллераInfПроизводительность контроллера, возвращенная как неотрицательное скалярное значение или Inf. Это значение является достигнутым использованием производительности возвращенного контроллера K, и H ∞ норма CL (см. hinfnorm). Если вы не обеспечиваете уровни производительности, чтобы протестировать использование gamTry или gamRange, затем gamma лучший достижимый уровень производительности.
Если вы обеспечиваете gamTry или gamRange, затем gamma фактический уровень производительности, достигнутый контроллером, вычисленным для лучшего передающего уровня производительности что hinfsyn попытки. Если заданные уровни производительности не достижимы, то gamma = Inf.
info — Данные о синтезе[]Дополнительные данные о синтезе, возвращенные как структура или [] (если заданный уровень производительности не достижим). Для находящегося в Riccati метода синтеза по умолчанию, info имеет следующие поля.
| Поле | Описание |
|---|---|
gamma | Уровень производительности использовался для расчета контроллера |
X,Y | Решения Riccati X ∞ и Y ∞ для уровня производительности |
Ku,Kw | Усиления обратной связи состояния контроллера |
Lx,Lu | Усиления наблюдателя контроллера |
Preg | Упорядоченный объект используется в |
AS | Контроллер все-решений параметризация, возвращенная как пространство состояний ( |
Для основанного на LMI метода синтеза, info содержит лучшую производительность gamma и соответствующие решения для LMI R и S. (Используйте hinfsynOptions изменить метод синтеза.)
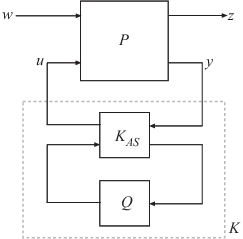
В общем случае решение проблемы оптимального управления нормы по бесконечности является групповым. Контроллер возвращен hinfsyn только одно конкретное решение, K. Для находящегося в Riccati метода по умолчанию, info.AS содержит контроллер все-решения параметризация K AS. Все решения с производительностью с обратной связью γ или меньше параметризовано свободной устойчивой картой сокращения Q, который ограничивается .
Другими словами, решения включают каждый контроллер стабилизации K (s), который делает
Здесь, передаточная функция с обратной связью CL. Этими контроллерами K (s) дают:
Ks = lft(info.AS,Q)
где Q устойчивая система LTI, удовлетворяющая norm(Q,Inf) < info.gamma.
hinfsyn дает вам усиления обратной связи состояния и усиления наблюдателя, которые можно использовать, чтобы выразить контроллер в форме наблюдателя. Форма наблюдателя контроллера K :
Здесь, we является оценкой возмущения худшего случая и инновационный термин, которым дан e:
hinfsyn возвращается обратная связь состояния получает Ku и Kw, и наблюдатель получает Lx и Lu как поля в info выходной аргумент.
Можно использовать эту форму контроллера для табличного управления в Simulink®. Для этого сведите в таблицу матрицы объекта и матрицы усиления контроллера как функция переменных планирования с помощью блока Matrix Interpolation. Затем используйте форму наблюдателя контроллера, чтобы обновить переменные контроллера, когда переменные планирования изменяются.
По умолчанию, hinfsyn использует 2D-Riccati формулы ([1], [2]) с циклом, переключающим [3]. Можно использовать hinfsynOptions превращаться в основанный на LMI метод ([4], [5], [6]). Можно также задать максимально-энтропийный метод. В том методе, hinfsyn возвращает H ∞ контроллер, который максимизирует энтропийный интеграл, относящийся к точке S0. Для систем непрерывного времени этот интеграл:
где передаточная функция с обратной связью CL. Подобный интеграл используется в системах дискретного времени.
Для всех методов функция использует стандартный γ - метод итерации, чтобы определить оптимальное значение уровня производительности γ. γ - итерацией является bisection algorithm, который запускается с высоких и низких оценок γ и выполняет итерации на значениях γ, чтобы приблизиться к оптимальному H ∞ система управления.
В каждом значении γ алгоритм тестирует значение γ, чтобы определить, существует ли решение. В находящемся в Riccati методе алгоритм вычисляет самый маленький уровень производительности, для которого стабилизировавшиеся решения Riccati X = X ∞/γ и Y = Y существуют ∞/γ. Для любого γ, больше, чем тот уровень производительности и в области значений gamRange, алгоритм оценивает формулы центрального контроллера (формулы K) и проверяет устойчивость с обратной связью CL = lft(P,K). Этот шаг эквивалентен проверке условий:
min(eig(X)) ≥ 0
min(eig(Y)) ≥ 0
rho(XY) <1, где спектральный радиус rho(XY) = max(abs(eig(XY)))
γ, который удовлетворяет этим условиям passes. Останавливающийся критерий алгоритма двоичного поиска требует относительной разницы между последним значением γ, которое перестало работать и последнее значение γ, которое передало быть меньше 0.01. (Можно изменить этот критерий с помощью hinfsynOptions.) hinfsyn возвращает контроллер, соответствующий наименьшему протестированному значению γ, которое передает. Для контроллеров дискретного времени алгоритм выполняет дополнительные расчеты, чтобы создать проходной матричный DK.
Используйте Display опция hinfsynOptions сделать hinfsyn отобразите значения, показывающие, какому из условий удовлетворяют для каждого протестированного значения γ.
Алгоритм работает лучше всего, когда следующим условиям удовлетворяет объект:
D 12 и D 21 имеет полный ранг.
имеет полный ранг столбца для всего ω ∊ R.
имеет полный ранг строки для всего ω ∊ R.
Когда эти условия ранга не содержат, у контроллера могут быть нежелательные свойства. Если D 12 и D 21 не является полным рангом, то H ∞ контроллер K может иметь большое высокочастотное усиление. Если любое из последних двух условий ранга не содержит на некоторой частоте ω, контроллер может очень слегка ослабить полюса около той частоты.
[1] Перчаточник, К., и Дж.К. Дойл. "Формулы пространства состояний для всех контроллеров стабилизации, которые удовлетворяют H ∞ связанная норма и отношения, чтобы рискнуть чувствительностью". Systems & Control Letters, Издание 11, Номер 8, 1988, стр 167–172.
[2] Дойл, J.C. K. Перчаточник, П. Харгонекэр, и Б. Фрэнсис. "Решения пространства состояний стандартного H2 и H ∞ управляют проблемами". Транзакции IEEE на Автоматическом управлении, Vol 34, Номере 8, август 1989, стр 831–847.
[3] Сафонов, M.G., D.J.N. Limebeer и Р.И. Чанг. "Упрощая H ∞ Теория через Перемену Цикла, Матричные Концепции Карандаша и Дескриптора". Int J. Противоречие, Издание 50, Номер 6, 1989, стр 2467-2488.
[4] Паккард, A., К. Чжоу, П. Пэнди, Дж. Леонхардсон и Г. Бэлас. "Оптимальное, постоянное подобие ввода-вывода, масштабирующееся для полной информации и проблем обратной связи состояния". Systems & Control Letters, Издание 19, Номер 4, 1992, стр 271–280.
[5] Gahinet, P. и П. Апкэриэн. "Линейный матричный подход неравенства к -управлению H". Int J. Устойчивое и Нелинейное Управление, Издание 4, Номер. 4, 1994, стр 421–448.
[6] Iwasaki, T. и Р. Скелтон. "Все контроллеры для проблемы -управления генерала Х: условия существования LMI и формулы пространства состояний". Automatica, Издание 30, Номер 8, 1994, стр 1307–1317.
