Получите текущее время ROS или системное время
ROS Toolbox / ROS
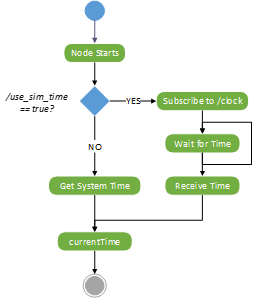
Блок Current Time выводит текущий ROS или системное время. Время ROS основано на системных часах вашего компьютера или /clock тема, опубликованная на узле ROS.
Используйте этот блок, чтобы синхронизировать ваше время симуляции с вашим связанным узлом ROS.
Если use_sim_time Параметр ROS устанавливается на true, блок возвращает время симуляции, опубликованное на /clock тема. В противном случае блок возвращает системное время вашей машины.
Установить use_sim_time параметры и получают время от /clock тема:
Соединитесь с сетью ROS, затем используйте блок Set Parameter или установите параметр в командном окне MATLAB®:
ptree = rosparam; set(ptree,'/use_sim_time',true)
Обычно, узел ROS, который публикует на /clock тема настраивает параметр.

