Выберите видимую область (ROI) из пиксельного потока
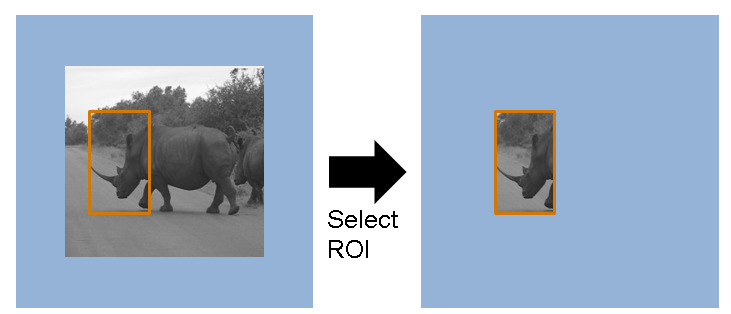
visionhdl.ROISelector Система object™ выбирает фрагмент активной системы координат от видеопотока. Общий размер системы координат остается то же самое. Управляющие сигналы указывают на новую активную область системы координат. Схема отображает неактивные пиксельные области синим и требуемую выходную область, обрисованную в общих чертах в оранжевом.
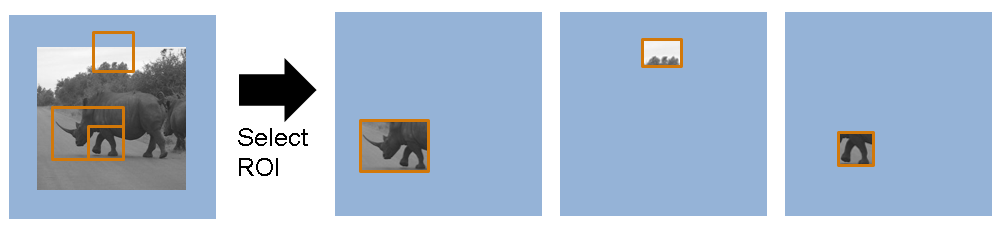
Можно задать фиксированный размер и местоположение для новой системы координат, или выбрать местоположение системы координат в режиме реального времени через входной параметр. Можно выбрать больше чем одну область. Задайте каждую область координатами верхнего левого угла и размерностями. Объект возвращает один набор пикселей и управляющих сигналов для каждой области, которую вы задаете. Объект устанавливает неактивные пиксели в выходной системе координат обнулять. Области независимы друг от друга, таким образом, они могут наложиться. Если вы задаете область, которая включает ребро активной системы координат, объект возвращает только активный фрагмент области. Схема показывает выходные системы координат для трех требуемых областей. Вторая выходная область (верхушки деревьев) не включает неактивную область выше системы координат.
Этот объект использует пиксельный интерфейс потоковой передачи со структурой для сигналов управления кадром. Этот интерфейс включает объекту действовать независимо от размера изображения и формата, и соединиться с другими объектами Vision HDL Toolbox™. Объект принимает и возвращает скалярное пиксельное значение. Объект принимает и возвращает управляющие сигналы как структуру, содержащую пять сигналов. Управляющие сигналы указывают на валидность каждого пикселя и его местоположения в системе координат. Чтобы преобразовать пиксельную матрицу в пиксельный поток и управляющие сигналы, используйте visionhdl.FrameToPixels объект. Для полного описания интерфейса смотрите Пиксельный Интерфейс Потоковой передачи.
Запуск в R2016b, вместо того, чтобы использовать step метод, чтобы выполнить операцию, заданную Системным объектом, можно вызвать объект с аргументами, как будто это была функция. Например, y = step(obj,x) и y = obj(x) выполните эквивалентные операции.
ROI = visionhdl.ROISelectorROI, это выбирает область по умолчанию активной системы координат от входного потока.
ROI = visionhdl.ROISelector(Name,Value)ROI, с дополнительными опциями, заданными одним или несколькими NameЗначение парные аргументы. Name имя свойства и Value соответствующее значение. Name должен появиться в одинарных кавычках (''). Можно задать несколько аргументов пары "имя-значение" в любом порядке как Name1,Value1,...,NameN,ValueN. Свойства, не заданные, сохраняют свои значения по умолчанию.
|
Местоположение выходных определений области.
Значение по умолчанию: |
|
Прямоугольные необходимые области, чтобы выбрать из входного кадра, заданного как N-by-4 матрица. N является количеством областей. Можно выбрать до 16 областей. Четыре элемента, которые задают каждую область, являются верхними левыми стартовыми координатами и размерностями, Значение по умолчанию: |
|
Количество Можно выбрать до 16 областей. Это свойство применяется, когда вы устанавливаете Значение по умолчанию: |
| шаг | Возвратите следующий пиксель в перевыбранной системе координат |
| Характерный для всех системных объектов | |
|---|---|
release | Позвольте изменения значения свойства Системного объекта |
Выберите фиксированную видимую область (ROI) из входного кадра.
Загрузите исходное изображение из файла.
frmOrig = imread('coins.png'); [frmActiveLines,frmActivePixels] = size(frmOrig); imshow(frmOrig) title 'Input Image'

Создайте сериализатор, возражают и задают неактивные пиксельные области.
frm2pix = visionhdl.FrameToPixels(... 'NumComponents',1,... 'VideoFormat','custom',... 'ActivePixelsPerLine',frmActivePixels,... 'ActiveVideoLines',frmActiveLines,... 'TotalPixelsPerLine',frmActivePixels+20,... 'TotalVideoLines',frmActiveLines+20,... 'StartingActiveLine',3,... 'FrontPorch',10);
Создайте объект выбрать необходимую область. Задайте прямоугольную область координатами верхнего левого угла и размерностей.
hPos = 80;
vPos = 60;
hSize = 65;
vSize = 50;
roicoin = visionhdl.ROISelector('Regions',[hPos vPos hSize vSize])roicoin =
visionhdl.ROISelector with properties:
RegionsSource: 'Property'
Regions: [80 60 65 50]
Сериализируйте тестовое изображение путем вызова step на объекте сериализатора. pixIn вектор значений интенсивности. ctrlIn вектор структур управляющего сигнала.
Примечание: Этот синтаксис запускается только в R2016b или позже. Если вы используете более ранний релиз, заменяете каждый вызов объекта с эквивалентным step синтаксис. Например, замените myObject(x) с step(myObject,x).
[pixIn,ctrlIn] = frm2pix(frmOrig);
Подготовьтесь обрабатывать пиксели путем предварительного выделения выходных векторов. Выходная система координат одного размера с входным кадром, но управляющие сигналы указывают на различную активную область.
[~,~,numPixelsPerFrame] = getparamfromfrm2pix(frm2pix); pixOut = uint8(zeros(numPixelsPerFrame,1)); ctrlOut = repmat(pixelcontrolstruct,numPixelsPerFrame,1);
Для каждого пикселя в заполненной системе координат примените маску области.
for p = 1:numPixelsPerFrame [pixOut(p),ctrlOut(p)] = roicoin(pixIn(p),ctrlIn(p)); end
Создайте объект deserializer с форматом, совпадающим с новой областью. Преобразуйте пиксельный поток во фрейм изображения путем вызова step на объекте deserializer. Отобразите получившееся изображение.
pix2frm = visionhdl.PixelsToFrame(... 'NumComponents',1,... 'VideoFormat','custom',... 'ActivePixelsPerLine',hSize,... 'ActiveVideoLines',vSize); [frmOutput,frmValid] = pix2frm(pixOut,ctrlOut); if frmValid figure imshow(frmOutput) title 'Output Image' end

Сгенерированный HDL-код для visionhdl.ROISelector Системный объект использует два 32-битных счетчика. Это не использует дополнительные счетчики в дополнительных областях.
Объект имеет задержку трех циклов. Объект возвращает выходной пиксель и сопоставленные управляющие сигналы на третьем вызове step метод после пиксельного значения был применен.
