Сформируйте контроллер сервомотора "линейного квадратичного гауссова" (LQG)
C = lqgtrack(kest,k)
C = lqgtrack(kest,k,'2dof')
C = lqgtrack(kest,k,'1dof')
C = lqgtrack(kest,k,...CONTROLS)
lqgtrack формирует контроллер сервомотора "линейного квадратичного гауссова" (LQG) с интегральным действием для цикла, показанного в следующем рисунке. Этот компенсатор гарантирует, что выход y отслеживает ссылочную команду r и отклоняет воздействия процесса w и шум измерения v. lqgtrack принимает, что r и y имеют ту же длину.
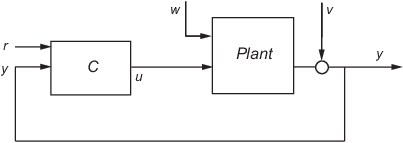
Всегда используйте положительную обратную связь, чтобы подключить контроллер сервомотора LQG C к объекту выход y.
C = lqgtrack(kest,k) формирует две степени свободы контроллер сервомотора LQG C путем соединения Оценки состояния фильтра Калмана kest и обратная связь состояния получает k, как показано в следующем рисунке. C имеет входные параметры и генерирует команду , где оценка Кальмана состояния объекта, и xi является интегратором выход.
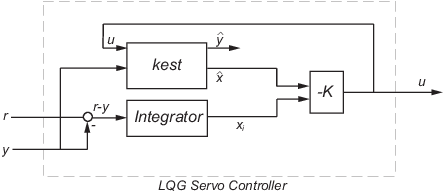
Размер матрицы усиления k определяет длину xi. xi, y и r у всех есть та же длина.
Две степени свободы контроллер сервомотора LQG уравнения пространства состояний
Синтаксис C = lqgtrack(kest,k,'2dof') эквивалентно C = lqgtrack(kest,k).
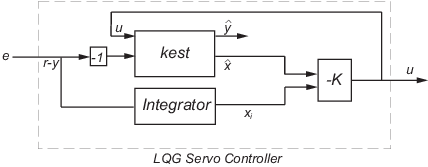
C = lqgtrack(kest,k,'1dof') формирует одну степень свободы контроллер сервомотора LQG C это берет ошибку отслеживания e = r – y, как введено вместо [r; y], как показано в следующем рисунке.
Одна степень свободы контроллер сервомотора LQG уравнения пространства состояний
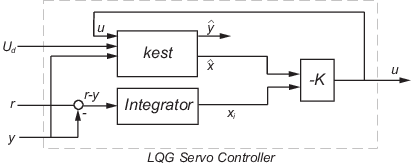
C = lqgtrack(kest,k,...CONTROLS) формирует контроллер сервомотора LQG C когда Оценка состояния фильтра Калмана kest имеет доступ к дополнительным известным (детерминированным) командам Ud объекта. В векторе индекса CONTROLS, задайте который входные параметры kest каналы управления u. Получившийся компенсатор C имеет входные параметры
[Ud; r; y] в двух случаях степени свободы
[Ud; e] в одном случае степени свободы
Соответствующая структура компенсатора для двух случаев степени свободы появляется в следующем рисунке.
См. Проект в качестве примера Контроллер Сервомотора LQG.
Можно использовать lqgtrack и для непрерывного - и для системы дискретного времени.
В системах дискретного времени интеграторы основаны на прямом Эйлере (см. lqi для деталей). Оценка состояния любой x [n |n] или x [n |n–1], в зависимости от типа средства оценки (см. kalman для деталей).
Для объекта дискретного времени уравнениями:
соединение "текущей" Оценки состояния фильтра Калмана к усилению LQR оптимально только когда и y [n] не зависит от w [n] (H = 0). Если этим условиям не удовлетворяют, вычисляют оптимальный контроллер LQG, использующий lqg.
