Интерполируйте положения вдоль запланированного пути к транспортному средству
poses = interpolate(refPath)
[ также возвращает направления движения транспортного средства в каждом положении, с помощью входных параметров от любого из предыдущих синтаксисов.poses,directions] = interpolate(___)
Запланируйте путь к транспортному средству через парковку при помощи оптимального быстро исследующего случайного дерева (RRT*) алгоритм. Проверяйте, что путь допустим, и затем постройте положения перехода вдоль пути.
Загрузите costmap парковки. Постройте costmap, чтобы видеть парковку и раздутые области для транспортного средства, чтобы избежать.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)
Задайте запускаются и целевые положения для транспортного средства как [x, y, Θ] векторы. Мировые единицы измерения для (x, y) местоположения исчисляются в метрах. Мировые единицы измерения для Θ углов ориентации в градусах.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];Используйте pathPlannerRRT возразите, чтобы запланировать путь от положения запуска до целевого положения.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Проверяйте, что путь допустим.
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
Интерполируйте положения перехода вдоль пути.
transitionPoses = interpolate(refPath);
Постройте запланированный путь и положения перехода на costmap.
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off

Запланируйте путь к транспортному средству через парковку при помощи быстро исследующего случайного дерева (RRT*) алгоритм. Интерполируйте положения транспортного средства в точках вдоль пути.
Загрузите costmap парковки. Постройте costmap, чтобы видеть парковку и раздутые области для транспортного средства, чтобы избежать.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)
Задайте запускаются и целевые положения для транспортного средства как [x, y, Θ] векторы. Мировые единицы измерения для (x, y) местоположения исчисляются в метрах. Мировые единицы измерения для Θ углов ориентации в градусах.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0]; Используйте pathPlannerRRT возразите, чтобы запланировать путь от положения запуска до целевого положения.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Интерполируйте положения транспортного средства каждый 1 метр вдоль целого пути.
lengths = 0 : 1 : refPath.Length; poses = interpolate(refPath,lengths);
Постройте интерполированные положения на costmap.
plot(costmap) hold on scatter(poses(:,1),poses(:,2),'DisplayName','Interpolated Poses') hold off

Путь состоит из нескольких сегментов, которые являются комбинациями движений (например, левый поворот, прямо, и правый поворот). Transition poses является положениями транспортного средства, соответствующими в конец одного движения и начало другого движения. Они представляют точки вдоль пути, соответствующего изменению в направлении или ориентации транспортного средства. interpolate функционируйте всегда возвращает положения перехода, даже если вы интерполируете только в заданных точках вдоль пути.
Длина пути между положениями перехода дана MotionLengths свойство сегментов пути. Например, рассмотрите следующий путь, который является driving.Path объект состоит из одного сегмента пути Dubins. Этот сегмент состоит из трех движений, аналогичных описанному MotionLengths и MotionTypes свойства сегмента.
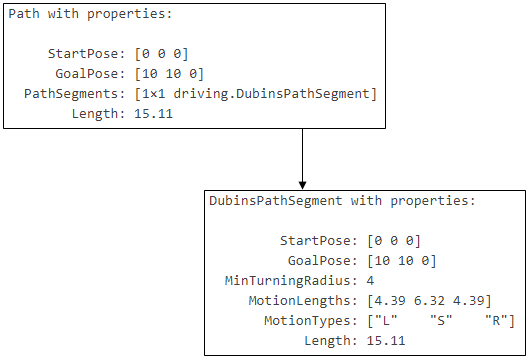
interpolate функция интерполирует следующие положения перехода в этом порядке:
Начальное положение транспортного средства, StartPose.
Положение после транспортного средства поворачивает налево ("L") для 4,39 метров под его максимальным руководящим углом.
Положение после транспортного средства идет прямо ("S") для 6,32 метров.
Положение после транспортного средства поворачивает направо ("R") для 4,39 метров под его максимальным руководящим углом. Это положение является также целевым положением, потому что это - последнее положение целого пути.
График показывает эти положения перехода, которые являются [x, y, Θ] векторы. x и y задают местоположение транспортного средства в мировых единицах измерения, таких как метры. Θ задает угол ориентации транспортного средства в градусах.
![]()
