Сохраните размерности транспортного средства
vehicleDimensions размерности транспортного средства объектно-ориентированной памяти. Рисунок показывает размерности, которые включены в vehicleDimensions.
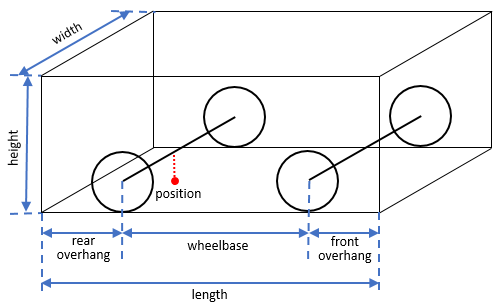
Положение транспортного средства часто представляется как одна точка, расположенная на земле в центре задней оси, как обозначено красной точкой в фигуре. Это положение соответствует естественному центру вращения транспортного средства.
Таблица приводит типичные типы транспортного средства и их соответствующие размерности.
| Классификация транспортных средств | Длина | Width | Высота | Колесная база | Передний нависающий край | Задний нависающий край |
|---|---|---|---|---|---|---|
| Автомобиль (седан) | 4,7 м | 1,8 м | 1,4 м | 2,8 м | 0,9 м | 1,0 м |
| Мотоцикл | 2,2 м | 0,6 м | 1,5 м | 1,51 м | 0,37 м | 0,32 м |
vdims = vehicleDimensions создает vehicleDimensions объект с длиной по умолчанию 4,7 м, шириной 1,8 м и высотой 1,4 м.
vdims = vehicleDimensions(___, использование один или несколько аргументов пары "имя-значение", чтобы установить Name,Value)Wheelbase, FrontOverhang, RearOverhang, и WorldUnits свойства. Name имя свойства и Value соответствующее значение. Name должен появиться в одинарных кавычках (' 'Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
Length из транспортного средства сумма Wheelbase, FrontOverhang, и RearOverhang. Если вы изменяете FrontOverhang, затем значение Wheelbase автоматически настраивает, чтобы сохранить Length постоянный. Любое изменение, приводящее к отрицательной колесной базе, вызывает ошибку.
Можно использовать размерности транспортного средства, чтобы задать vehicleCostmap это представляет пространство поиска планирования вокруг транспортного средства. Алгоритмы планирования пути, такие как pathPlannerRRT, используйте размерности транспортного средства, чтобы найти, что путь для транспортного средства следует.
