Добавьте транспортное средство в ведущий сценарий
vc = vehicle(scenario)Vehicle объект, vc, к ведущему сценарию, scenario. Транспортное средство имеет значения свойств по умолчанию.
Vehicles является специализированным типом кубоида агента объект, (имеющий форму поля), который имеет четыре колеса. Для получения дополнительной информации о том, как транспортные средства заданы, смотрите Агентов и Транспортные средства.
vc = vehicle(scenario,Name,Value)
Создайте ведущий сценарий, содержащий кривую дорогу, две дороги подряд и двух агентов: автомобиль и велосипед. Оба агента проходят дорога в течение 60 секунд.
Создайте ведущий объект сценария.
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
Создайте кривую дорогу с помощью дорожных центральных точек после дуги круга с 800-метровым радиусом. Дуга запускается на уровне 0 °, заканчивается на уровне 90 ° и производится в шаге на 5 °.
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; road(scenario,roadcenters,roadwidth);
Добавьте две дороги подряд с шириной по умолчанию, с помощью дорожных центральных точек в каждом конце.
roadcenters = [700 0 0; 100 0 0]; road(scenario,roadcenters) roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters)
Получите дорожные контуры.
rbdry = roadBoundaries(scenario);
Добавьте автомобиль и велосипед к сценарию. Расположите автомобиль в начале первой дороги подряд.
car = vehicle(scenario,'Position',[700 0 0],'Length',3,'Width',2,'Height',1.6);
Расположите велосипед дальше в будущем.
bicycle = actor(scenario,'Position',[706 376 0]','Length',2,'Width',0.45,'Height',1.5);
Постройте сценарий.
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');

Отобразите положения агента и профили.
poses = actorPoses(scenario)
poses=2×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
profiles = actorProfiles(scenario)
profiles=2×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
scenario — Ведущий сценарийdrivingScenario объектВедущий сценарий в виде drivingScenario объект.
Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
vehicle('Length',2.2,'Width',0.6,'Height',1.5) создает транспортное средство с размерностями мотоцикла. Модули исчисляются в метрах.'Mesh' — Расширенная объектная meshextendedObjectMesh объектРасширенная объектная mesh в виде extendedObjectMesh объект.
'PlotColor' — Цвет отображения транспортного средстваЦвет отображения транспортного средства в виде разделенной запятой пары, состоящей из 'PlotColor' и триплет RGB, шестнадцатеричный цветовой код, название цвета или короткое название цвета.
Транспортное средство появляется в заданном, раскрашивают всю программируемую визуализацию сценария, включая plot функция, chasePlot функция и функции построения графика birdsEyePlot объекты. Если вы импортируете сценарий в приложение Driving Scenario Designer, то транспортное средство появляется в этом, раскрашивают всю визуализацию приложения. Если вы импортируете сценарий в Simulink®, то транспортное средство появляется в этом, раскрашивают Bird's-Eye Scope.
Если вы не задаете цвет для транспортного средства, функция присваивает один на основе порядка цвета по умолчанию Axes объекты. Для получения дополнительной информации смотрите ColorOrder свойство для Axes объекты.
Для пользовательского цвета задайте триплет RGB или шестнадцатеричный цветовой код.
Триплет RGB представляет собой трехэлементный вектор-строку, элементы которого определяют интенсивность красных, зеленых и синих компонентов цвета. Интенсивность должна быть в области значений [0,1]; например, [0.4 0.6 0.7].
Шестнадцатеричный цветовой код является вектором символов или строковым скаляром, который запускается с символа хеша (#) сопровождаемый тремя или шестью шестнадцатеричными цифрами, которые могут лежать в диапазоне от 0 к F. Значения не являются чувствительными к регистру. Таким образом, цветовые коды '#FF8800', '#ff8800', '#F80', и '#f80' эквивалентны.
Кроме того, вы можете задать имена некоторых простых цветов. Эта таблица приводит опции именованного цвета, эквивалентные триплеты RGB и шестнадцатеричные цветовые коды.
| Название цвета | Краткое название | Триплет RGB | Шестнадцатеричный цветовой код | Внешний вид |
|---|---|---|---|---|
'red' | 'r' | [1 0 0] | '#FF0000' |
|
'green' | 'g' | [0 1 0] | '#00FF00' |
|
'blue' | 'b' | [0 0 1] | '#0000FF' |
|
'cyan' | 'c' | [0 1 1] | '#00FFFF' |
|
'magenta' | 'm' | [1 0 1] | '#FF00FF' |
|
'yellow' | 'y' | [1 1 0] | '#FFFF00' |
|
'black' | 'k' | [0 0 0] | '#000000' |
|
'white' | 'w' | [1 1 1] | '#FFFFFF' |
|
Вот являются триплеты RGB и шестнадцатеричные цветовые коды для цветов по умолчанию использованием MATLAB® во многих типах графиков.
| Триплет RGB | Шестнадцатеричный цветовой код | Внешний вид |
|---|---|---|
[0 0.4470 0.7410] | '#0072BD' |
|
[0.8500 0.3250 0.0980] | '#D95319' |
|
[0.9290 0.6940 0.1250] | '#EDB120' |
|
[0.4940 0.1840 0.5560] | '#7E2F8E' |
|
[0.4660 0.6740 0.1880] | '#77AC30' |
|
[0.3010 0.7450 0.9330] | '#4DBEEE' |
|
[0.6350 0.0780 0.1840] | '#A2142F' |
|
'Position' — Позиция центра транспортного средстваПозиция вращательного центра транспортного средства в виде разделенной запятой пары, состоящей из 'Position' и [x
y
z] вектор с действительным знаком.
Вращательный центр транспортного средства является средней точкой своей задней оси. Транспортное средство расширяет назад расстоянием, равным заднему нависающему краю. Транспортное средство расширяет вперед расстояние, равное сумме колесной базы и прямого нависающего края. Модули исчисляются в метрах.
Пример: [10;50;0]
'Velocity' — Скорость центра транспортного средстваСкорость (v) транспортного средства сосредотачивается в x - y - и z - направления в виде разделенной запятой пары, состоящей из 'Velocity' и [v x
v y
v z] вектор с действительным знаком. 'Position' пара "имя-значение" задает центр транспортного средства. Модули исчисляются в метрах в секунду.
Пример: [-4;7;10]
'Yaw' — Угол отклонения от курса транспортного средстваУгол отклонения от курса транспортного средства в виде разделенной запятой пары, состоящей из 'Yaw' и действительный скаляр. Yaw является углом вращения транспортного средства вокруг z - ось и положителен в направлении по часовой стрелке. Угловые значения перенесены к области значений [–180, 180]. Модули в градусах.
Пример: -0.4
'Pitch' — Передайте угол транспортного средстваПередайте угол транспортного средства в виде разделенной запятой пары, состоящей из 'Pitch' и действительный скаляр. Pitch является углом вращения транспортного средства вокруг y - ось и положителен в направлении по часовой стрелке. Угловые значения перенесены к области значений [–180, 180]. Модули в градусах.
Пример: 5.8
'Roll' — Угол вращения транспортного средстваУгол вращения транспортного средства в виде разделенной запятой пары, состоящей из 'Roll' и действительный скаляр. Roll является углом вращения транспортного средства вокруг x - ось и положителен в направлении по часовой стрелке. Угловые значения перенесены к области значений [–180, 180]. Модули в градусах.
Пример: -10
'AngularVelocity' — Скорость вращения транспортного средстваСкорость вращения (ω) транспортного средства, в мировых координатах в виде разделенной запятой пары, состоящей из 'AngularVelocity' и [ω x
ω y
ω z] вектор с действительным знаком. Модули в градусах в секунду.
Пример: [20 40 20]
'Length' — Длина транспортного средстваДлина транспортного средства в виде разделенной запятой пары, состоящей из 'Length' и положительный действительный скаляр. Модули исчисляются в метрах.
Пример: 5.5
'Width' — Ширина транспортного средстваШирина транспортного средства в виде разделенной запятой пары, состоящей из 'Width' и положительный действительный скаляр. Модули исчисляются в метрах.
Пример: 2.0
'Height' — Высота транспортного средстваВысота транспортного средства в виде разделенной запятой пары, состоящей из 'Height' и положительный действительный скаляр. Модули исчисляются в метрах.
Пример: 2.1
'RCSPattern' — Радарный шаблон поперечного сечения транспортного средстваШаблон радарного поперечного сечения (RCS) транспортного средства в виде разделенной запятой пары, состоящей из 'RCSPattern' и Q-by-P матрица с действительным знаком. RCS является функцией азимута и углов вертикального изменения, где:
Q является количеством углов вертикального изменения, заданных 'RCSElevationAngles' пара "имя-значение".
P является количеством углов азимута, заданных 'RCSAzimuthAngles' пара "имя-значение".
Модули находятся в децибелах на квадратный метр (dBsm).
Пример: 5.8
'RCSAzimuthAngles' — Углы азимута шаблона транспортного средства RCSУглы азимута шаблона транспортного средства RCS в виде разделенной запятой пары, состоящей из 'RCSAzimuthAngles' и P - элемент вектор с действительным знаком. P является количеством углов азимута. Значения находятся в области значений [-180 °, 180 °].
Каждый элемент RCSAzimuthAngles задает угол азимута соответствующего столбца 'RCSPattern' пара "имя-значение". Модули в градусах.
Пример: [-90:90]
'RCSElevationAngles' — Углы вертикального изменения шаблона транспортного средства RCSУглы вертикального изменения шаблона транспортного средства RCS в виде разделенной запятой пары, состоящей из 'RCSElevationAngles' и Q - элемент вектор с действительным знаком. Q является количеством углов вертикального изменения. Значения находятся в области значений [-90 °, 90 °].
Каждый элемент RCSElevationAngles задает угол вертикального изменения соответствующей строки 'RCSPattern' пара "имя-значение". Модули в градусах.
Пример: [0:90]
'FrontOverhang' — Передний нависающий край транспортного средстваПередний нависающий край транспортного средства в виде разделенной запятой пары, состоящей из 'FrontOverhang' и действительный скаляр. Передний нависающий край является расстоянием, которое транспортное средство расширяет вне передней оси. Если транспортное средство не расширяет мимо передней оси, то передний нависающий край отрицателен. Модули исчисляются в метрах.
Пример: 0.37
'RearOverhang' — Задний нависающий край транспортного средстваЗадний нависающий край транспортного средства в виде разделенной запятой пары, состоящей из 'RearOverhang' и действительный скаляр. Задний нависающий край является расстоянием, которое транспортное средство расширяет вне задней оси. Если транспортное средство не расширяет мимо задней оси, то задний нависающий край отрицателен. Отрицательный задний нависающий край распространен в грузовиках полуприцепа, где такси грузовика не нависает над задним колесом. Модули исчисляются в метрах.
Пример: 0.32
'Wheelbase' — Расстояние между осями транспортного средстваРасстояние между передними и задними осями транспортного средства в виде разделенной запятой пары, состоящей из 'Wheelbase' и положительный действительный скаляр. Модули исчисляются в метрах.
Пример: 1.51
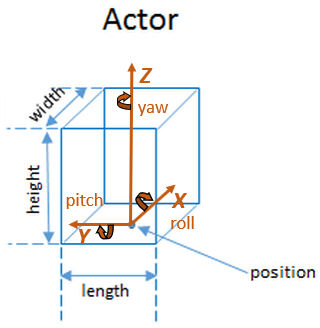
В ведущих сценариях actor является кубоидом объект, (имеющий форму поля) с определенной длиной, шириной и высотой. Агенты также имеют шаблон радарного поперечного сечения (RCS), заданный в dBsm, который можно совершенствовать путем установки углового азимута и координат вертикального изменения. Положение агента задано как центр его нижней поверхности. Эта центральная точка используется в качестве вращательного центра агента, его точки контакта с землей и его источника в его системе локальной координаты. В этой системе координат:
X - ось указывает вперед от агента.
Y - точки оси, оставленные от агента.
Z - ось подчеркивает от земли.
Прокрутитесь, сделайте подачу, и отклонение от курса по часовой стрелке положительно при взгляде в прямом направлении X - Y - и Z - оси, соответственно.
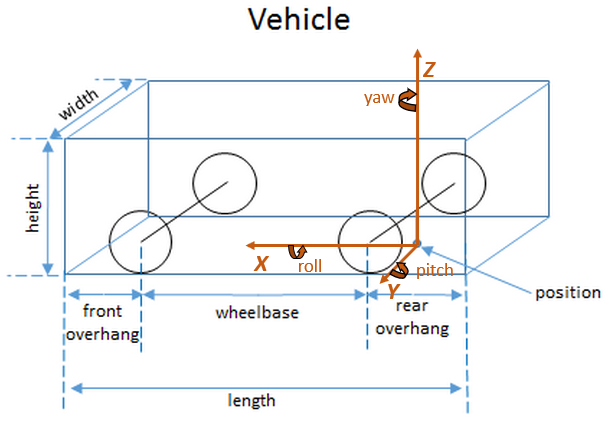
vehicle является агентом, который перемещается в колеса. Транспортные средства имеют три дополнительных свойства, которые управляют размещением их передней и задней оси.
Wheelbase — Расстояние между передними и задними осями
Front overhang — Расстояние между передней стороной транспортного средства и передней осью
Rear overhang — Расстояние между задней осью и задней частью транспортного средства
В отличие от других типов агентов, положение транспортного средства задано точкой на том основании, что ниже центра ее задней оси. Эта точка соответствует естественному центру вращения транспортного средства. Как с агентами нетранспортного средства, эта точка является источником в системе локальной координаты транспортного средства, где:
X - ось указывает вперед от транспортного средства.
Y - точки оси, оставленные от транспортного средства.
Z - ось подчеркивает от земли.
Прокрутитесь, сделайте подачу, и отклонение от курса по часовой стрелке положительно при взгляде в прямом направлении X - Y - и Z - оси, соответственно.
Эта таблица показывает список общих агентов и их размерностей. Задавать эти значения в Actor и Vehicle объекты, набор соответствующие показанные свойства.
| Классификация агентов | Объект агента | Свойства агента | ||||||
|---|---|---|---|---|---|---|---|---|
Length | Width | Height | FrontOverhang | RearOverhang | Wheelbase | RCSPattern | ||
| Пешеход | Actor | 0,24 м | 0,45 м | 1,7 м | Нет данных | Нет данных | Нет данных | – 8 dBsm |
| Автомобиль | Vehicle | 4,7 м | 1,8 м | 1,4 м | 0,9 м | 1,0 м | 2,8 м | 10 dBsm |
| Мотоцикл | Vehicle | 2,2 м | 0,6 м | 1,5 м | 0,37 м | 0,32 м | 1,51 м | 0 dBsm |
