Спроектируйте и симулируйте явный прогнозирующий контроллер модели
Библиотека Simulink MPC
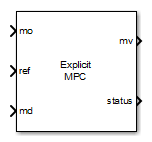
Блок Explicit MPC Controller использует следующие входные сигналы:
Измеренный объект выходные параметры (mo)
Ссылка или заданное значение (ref)
Измеренное воздействие объекта (md), если любой
Основное отличие - то, что блок Explicit MPC Controller использует закон о надзоре поиска по таблице во время каждого контрольного интервала вместо того, чтобы решить квадратичную программу. Уменьшаемое онлайновое вычислительное усилие выгодно в приложениях, требующих короткого контрольного интервала. Первичный компромисс является более тяжелым оффлайновым вычислительным усилием определить закон о надзоре и больший объем потребляемой памяти, чтобы сохранить его. Комбинаторный символ этого расчета ограничивает свое использование приложениями с относительно немногими вход, выход, и переменные состояния, короткий горизонт предсказания и немного выходных ограничений.
Explicit MPC Controller поддерживает только подмножество дополнительных функций MPC, как обрисовано в общих чертах в следующей таблице.
| Поддерживавшие функции | Неподдерживаемые функции |
|---|---|
|
|
Блок Explicit MPC Controller имеет следующие группировки параметра:
explicitMPC объект, содержащий закон о надзоре, который будет использоваться. Это должно существовать в рабочей области. Используйте generateExplicitMPC команда, чтобы создать этот объект.
Дополнительный mpcstate объект, задающий начальное состояние контроллера. По умолчанию блок использует Model.Nominal свойство объекта контроллера.
Если ваш диспетчер использует оценку состояния по умолчанию, этот импорт помечен mo. Соедините этот импорт в измеренные выходные сигналы объекта. Диспетчер MPC использует измеренный объект выходные параметры, чтобы улучшить его оценки состояния.
Чтобы включить пользовательскую оценку состояния, в разделе General, выбирают Use custom state estimation instead of using the built-in Kalman filter. Выбор этой опции изменяет метку на этом импорте в x[k|k]. Соедините сигнал, который обеспечивает оценки состояния контроллера (объект, воздействие и шумовые состояния модели). Используйте пользовательские оценки состояния, когда альтернативный метод оценки рассматривается выше встроенного средства оценки или когда состояния полностью измеримы.
В каждый момент управления, ref сигнал должен содержать текущие ссылочные значения (цели или заданные значения) для выходных переменных ny, где ny является общим количеством выходных параметров, включая измеренные и неизмеренные выходные параметры. Поскольку этот блок не поддерживает ссылочный предварительный просмотр, ref не может быть задан как матрица.
mv выходной порт обеспечивает сигнал, задающий переменные, которыми управляют, для управления объектом. Контроллер обновляет его mv выходной порт в каждый момент управления использование закона о надзоре содержится в явном контроллере MPC объект. Если оценка закона о надзоре перестала работать, этот сигнал неизменен; то есть, это сохранено в предыдущем успешном результате.
Добавьте импорт (md) с которым можно соединить векторный сигнал, содержащий элементы nmd, где nmd является количеством измеренных воздействий.
Поскольку этот блок не поддерживает измеренный предварительный просмотр воздействия, md не может быть задан как матрица.
Добавьте импорт (ext.mv) с которым вы соединяете векторный сигнал, который содержит фактические переменные, которыми управляют, (MV), используемые на объекте. Диспетчер использует этот сигнал обновить их оценки состояния контроллера в каждом контрольном интервале. Используя этот импорт улучшает точность оценки состояния, когда MVS, используемый на объекте, отличается от MVS, вычисленного блоком, например, должным сигнализировать о насыщении или условии переопределения.
Используя эту опцию может вызвать алгебраический цикл в модели Simulink®, поскольку существует прямое сквозное соединение от ext.mv импортируйте к mv выходной порт. Чтобы предотвратить такие алгебраические циклы, вставьте блок Memory или блок Unit Delay.
Для получения дополнительной информации смотрите соответствующий раздел страницы с описанием блока MPC Controller.
Добавьте выходной порт (status) это указывает ли последняя явная оценка закона о надзоре MPC, за которой следуют. Выходной порт обеспечивает скалярный сигнал, который имеет одно из следующих значений:
1 — Успешная явная оценка закона о надзоре
0 — Отказ: Один или несколько параметров закона о надзоре из области значений.
– 1 — Неопределенный: параметры Закона о надзоре были в допустимой области значений, но экстраполяция была необходима.
Если status или 0 или –1, mv выходной порт остается в последнем известном хорошем значении.
Добавьте выходной порт (region) обеспечение индекса многогранной области, используемой в последней явной оценке закона о надзоре (скаляр). Если оценка закона о надзоре перестала работать, сигнал в этом выходном порту равняется нулю.
Добавьте выходной порт (est.state) поскольку диспетчер утверждает оценки, x[k|k], в каждый момент управления. Эти оценки включают объект, воздействие и шумовые состояния модели.
Замените mo с x[k|k] импортируйте для пользовательской оценки состояния как описано в Необходимом Inports.
Задайте тип данных блока переменных, которыми управляют, как одно из следующего:
double — Плавающая точка двойной точности (значение по умолчанию)
single Плавающая точка с одинарной точностью
Если вы реализуете блок на цели с одинарной точностью, задаете тип выходных данных как single.
Для примера симуляции с одинарной точностью и с двойной точностью и генерации кода для контроллера MPC, смотрите Симуляцию и Генерацию кода Используя Simulink Coder.
Чтобы просмотреть типы данных порта в модели, в Редакторе Simulink, выбирают Display > Signals & Ports Port Data Types.
Используйте шаг расчета родительской подсистемы как шаг расчета блока. Выполнение так позволяет вам условно выполнять этот блок в блоки Triggered Subsystem или Function-Call Subsystem. Для примера смотрите Используя диспетчера MPC Блока В Вызове функции и Инициированных Подсистемах.
Необходимо выполнить Function-Call Subsystem или блоки Triggered Subsystem на уровне частоты дискретизации контроллера. В противном случае вы видите неожиданные результаты.
Чтобы просмотреть шаг расчета блока, в Редакторе Simulink, выбирают Display > Sample Time. Выберите Colors, Annotations или All. Для получения дополнительной информации, информация о Шаге расчета вида на море (Simulink).
Добавьте импорт (switch) чей вход задает, оценивает ли контроллер его закон о надзоре. Если входной сигнал является нулем, контроллер обычно ведет себя. Если входной сигнал является ненулевым, блок Explicit MPC Controller выключает оценку контроллера. Это действие уменьшает вычислительное усилие, когда контроллер, выход не нужен, такой как тогда, когда система действует вручную или другой контроллер, вступил во владение. Однако контроллер продолжает обновлять его оценки внутреннего состояния обычным способом. Таким образом это готово возобновить вычисления оптимизации каждый раз, когда switch возвраты к нулю сигнала. В то время как оценка контроллера выключена, блок MPC Controller передает текущий ext.mv предупредите выведенному контроллеру. Если ext.mv импорт не включен, контроллер, которым выход сохранен в значении, которое это имело, когда оценка была отключена.
