Этот пример готовых узлов представляет полную модель динамики аппарата перенесение постоянному тестовому маневру радиуса. Для получения информации о подобных маневрах см. стандарты SAE J266_199601[1] и ISO 4138:2012 [2]. Можно создать собственные версии, устанавливание среды, чтобы протестировать то транспортное средство соответствует конструктивным требованиям при нормальных и экстремальных условиях движения. Используйте этот пример готовых узлов в поездке и обрабатывающих исследованиях, и шасси управляет разработкой, чтобы охарактеризовать регулирование и боковую динамику аппарата.
Можно сконфигурировать пример готовых узлов для разомкнутого цикла и тестов с обратной связью:
Разомкнутый цикл — Обеспечивает целевую скорость и угол руля, чтобы определить поперечное ускорение, характеристики заноса и держащиеся углы для определенных ускорений и последующих тестовых маневров. Для теста разомкнутого цикла, набор блок Reference Generator параметр Maneuver к Increasing Steer.
С обратной связью — Использование прогнозирующий драйвер, чтобы обеспечить предварительно заданный радиус поворота при различных скоростях для дорожных качеств автомобиля и исследования качества работы обработки. Для теста с обратной связью, набор блок Reference Generator параметр Maneuver к Constant radius.
Чтобы создать и открыть рабочую копию постоянного примера готовых узлов радиуса, войти
Эта таблица суммирует блоки и подсистемы в примере готовых узлов. Некоторые подсистемы содержат варианты.
| Элемент примера готовых узлов | Описание | Варианты |
|---|---|---|
Ссылочный блок Generator | Устанавливает параметры, которые конфигурируют маневр и 3D среду визуализации. По умолчанию блок установлен для постоянного маневра радиуса с 3D отключенной средой механизма симуляции. Для минимальных 3D требований к аппаратным средствам среды визуализации смотрите 3D Требования Engine Визуализации. Чтобы включить 3D визуализацию, на вкладке 3D Engine, выбирают Enabled. | ✓ |
Блок Driver Commands | Реализует модель драйвера что использование примера готовых узлов, чтобы сгенерировать ускорение, торможение, механизм и регулирование команд. По умолчанию вариантом блока Driver Commands является блок Predictive Driver. | ✓ |
Среда | Ветер реализаций и дорожные силы. | ✓ |
Контроллеры | Контроллеры реализаций для блоков управления двигателем (ЭКЮ), передачи и тормоза | ✓ |
Пассажирское транспортное средство | Реализует:
| ✓ |
Визуализация | Обеспечивает траекторию транспортного средства и ответ драйвера | ✓ |
Блок Reference Generator устанавливает параметры, которые конфигурируют маневр и 3D среду симуляции. По умолчанию блок установлен для постоянного маневра радиуса с 3D отключенной средой механизма симуляции.
Используйте параметр Maneuver, чтобы задать тип маневра. Можно задать двойное изменение маршрута, развернутый синус, синус с живут, и медленно увеличивающиеся маневры.
Если вы выбираете параметр Use maneuver-specific driver, initial position, and scene, пример готовых узлов устанавливает драйвер, исходное положение и сцену для маневра, который вы задали.
Для получения дополнительной информации смотрите Reference Generator.
Блок Driver Commands реализует модель драйвера что использование примера готовых узлов, чтобы сгенерировать ускорение, торможение, механизм и регулирование команд. По умолчанию, если вы выбираете параметры блоков Reference Generator Use maneuver-specific driver, initial position, and scene, пример готовых узлов выбирает драйвер для маневра, который вы задали.
Установка командного режима транспортного средства | Реализация |
|---|---|
| Блок Longitudinal Driver — Продольный отслеживающий скорость контроллер. На основе ссылки и скоростей обратной связи, блок генерирует нормированное ускорение и тормозящие команды, которые могут варьироваться от 0 до 1. Используйте блок, чтобы смоделировать динамический ответ драйвера или сгенерировать команды, необходимые, чтобы отследить продольный цикл диска. |
| Блок Predictive Driver — Контроллер, который генерирует нормированное регулирование, ускорение и торможение команд, чтобы отследить продольную скорость и боковое ссылочное смещение. Нормированные команды могут варьироваться между-1 к 1. Диспетчер использует однодорожечное (велосипед) модель для оптимального управления предварительным просмотром одно точки. |
| Реализует систему разомкнутого цикла так, чтобы можно было сконфигурировать пример готовых узлов для постоянного или основанного на сигнале регулирования, ускорения, торможения и ввода команд механизма. |
Подсистема Среды генерирует ветер и наземные войска. Пример готовых узлов имеет эти варианты среды.
| Среда | Вариант | Описание |
|---|---|---|
Оснуйте обратную связь |
| Блок Vehicle Terrain Sensor использования, чтобы реализовать трассировку лучей в 3D среде |
| Реализует постоянное значение трения |
Подсистема Контроллеров генерирует крутящий момент механизма, механизм передачи и команды тормоза. Пример готовых узлов имеет эти варианты тормоза.
| Контроллер | Вариант | Описание |
|---|---|---|
Управление тормозным давлением |
| Контроллер обратной связи антиблокировочной тормозной системы (ABS), который переключается между двумя состояниями |
| Тормозной контроллер разомкнутого цикла |
Пассажирская подсистема Транспортного средства имеет механизм, контроллеры и кузов с четырьмя колесами. А именно, транспортное средство содержит эти подсистемы.
| Тело, приостановка, подсистема колес | Вариант | Описание |
|---|---|---|
PassVeh7DOF |
| Транспортное средство с четырьмя колесами:
|
PassVeh14DOF |
| Транспортное средство с четырьмя колесами.
|
| Подсистемы двигателей | Вариант | Описание |
|---|---|---|
Сопоставленный Engine |
| Сопоставленный двигатель с искровым зажиганием |
Регулирование, передача, автомобильная трансмиссия и подсистема тормозов | Вариант | Описание | |
|---|---|---|---|
Идеал автомобильной трансмиссии фиксированный механизм | Модель Driveline | All Wheel Drive | Сконфигурируйте автомобильную трансмиссию для с приводом на все колеса, с передними ведущими колесами, или задний привод Задайте тип связи крутящего момента |
| |||
| |||
Передача |
| Идеал зафиксировал передачу механизма | |
Когда вы запускаете симуляцию, подсистема Визуализации обеспечивает драйвер, транспортное средство и информацию об ответе. Пример готовых узлов регистрирует сигналы транспортного средства во время маневра, включая регулирование, транспортное средство и скорость вращения двигателя и поперечное ускорение. Можно использовать Инспектора Данных моделирования, чтобы импортировать регистрируемые сигналы и исследовать данные.
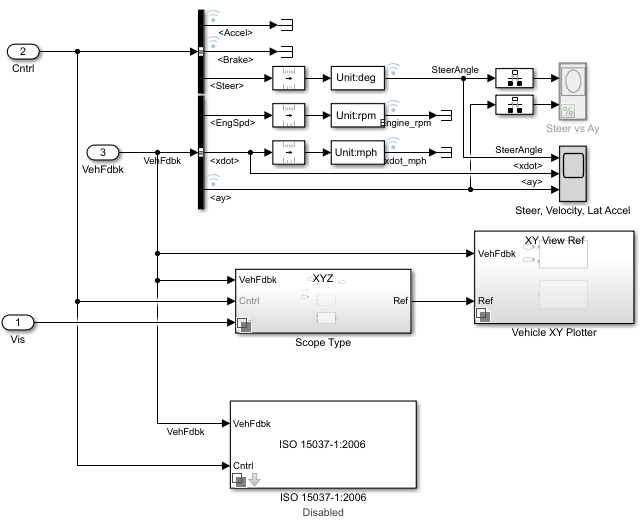
| Элемент | Описание |
|---|---|
Команды драйвера | Команды драйвера:
|
Ответ транспортного средства | Ответ транспортного средства:
|
Держитесь, Скорость, блок Lat Accel Scope |
|
Транспортное средство плоттер XY | Транспортное средство, продольное по сравнению с боковым расстоянием |
Блок ISO 15037-1:2006 | Отобразите сигналы измерения стандарта ISO в Инспекторе Данных моделирования, включая угол руля и крутящий момент, продольную и боковую скорость и угол заноса |
[1] J266_199601. Установившиеся направленные процедуры контрольного теста для легковых автомобилей и легких грузовиков. Варрендэйл, PA: SAE International, 1996.
[2] ISO 4138:2012. Легковые автомобили — Установившееся круговое ведущее поведение — методы тестирования Разомкнутого цикла. Женева: ISO, 2012.
3D Engine | Driver Commands | Reference Generator
