

Графически анализируйте обратную связь MIMO
loopview(G,C)
loopview(G,C,info)
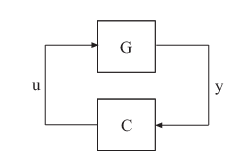
loopview( характеристики графиков следующей положительной обратной связи, мультивхода, мультивыводят (MIMO) обратную связь с объектом G,C)G и контроллер C.
Использование loopview чтобы анализировать эффективность настроенной системы управления, вы получаете использование looptune.
Примечание
Если вы настраиваете модель Simulink® с looptune через slTuner соедините интерфейсом, анализируйте эффективность своего использования системы управления loopview (Simulink Control Design) для slTuner (требует Simulink Control Design™).
loopview строит сингулярные значения:
Частотные характеристики разомкнутого контура G*C и C*G
Функция чувствительности S = inv(1-G*C) и дополнительная чувствительность T = 1-S
Максимум (цель), фактические (настроенные), и нормированные запасы устойчивости MIMO. loopview строит многоконтурное дисковое поле (см., что Анализ Устойчивости Использует Дисковые Поля (Robust Control Toolbox)). Используйте этот график проверить, что запасы устойчивости настроенной системы не значительно превышают целевое значение.
Для получения дополнительной информации о сингулярных значениях, смотрите sigma.
loopview( использует G,C,info)info структура, возвращенная looptune. Этот синтаксис также строит цель и настроенные значения настраивающихся ограничений, наложенных на систему. Дополнительные графики включают:
Сингулярные значения максимального позволенного S и T. Кривая отметила S/T Max показывает максимальный позволенный S на низкочастотной стороне графика и максимальном позволенном T на высокочастотной стороне. Эти кривые являются ограничениями это looptune налагает на S и T осуществлять целевую перекрестную область значений wc.
Цель и настроенные значения ограничений, наложенных любыми настраивающимися целевыми требованиями, вы использовали с looptune.
Использование loopview с info структура, чтобы помочь в поиске и устранении неисправностей при настройке сбоев, чтобы удовлетворить все требования.
|
Числовая модель LTI или настраиваемый Можно получить |
|
Можно получить |
|
|
Настройте систему управления и используйте loopview исследовать эффективность настроенного контроллера.
s = tf('s'); G = 1/(75*s+1)*[87.8 -86.4; 108.2 -109.6]; G.InputName = {'qL','qV'}; G.OutputName = 'y'; D = tunableGain('Decoupler',eye(2)); PI_L = tunablePID('PI_L','pi'); PI_L.OutputName = 'qL'; PI_V = tunablePID('PI_V','pi'); PI_V.OutputName = 'qV'; sum = sumblk('e = r - y',2); C0 = (blkdiag(PI_L,PI_V)*D)*sum; wc = [0.1,1]; options = looptuneOptions('RandomStart',5); [G,C,gam,info] = looptune(-G,C0,wc,options);
Final: Peak gain = 0.956, Iterations = 28 Achieved target gain value TargetGain=1.
figure('Position',[100,100,520,1000])
loopview(G,C,info)
Первый график показывает, что коэффициент усиления разомкнутого контура перекрестно соединяет падение близко к заданному интервалу [0.1,1]. Этот график также включает настроенные значения функции чувствительности S = inv(1-G*C) и дополнительная чувствительность T = 1-S. Эти кривые отражают ограничения что looptune налагает на S и T осуществлять целевую перекрестную область значений wc.
Вторые и третьи графики показывают, что запасы устойчивости MIMO настроенной системы падают хорошо в целевом диапазоне.
Для анализа моделей Simulink, настроенных с looptune через slTuner Интерфейс (Simulink Control Design), использовать loopview (Simulink Control Design) для slTuner (требует Simulink Control Design).
looptune | looptune (for
slTuner) (Simulink Control Design) | loopview (for
slTuner) (Simulink Control Design) | slTuner (Simulink Control Design)