Постройте симулированный ответ времени динамической системы к произвольным входным параметрам; данные о симулированном отклике
lsim( строит симулированный ответ времени модели
sys,u,t)sys динамической системы к входной истории (tU). Векторный t задает выборки времени для симуляции. Для систем одно входа, входной сигнал u вектор из той же длины как t. Для мультивходных систем, u массив со столькими же строк, сколько существуют выборки времени (length(t)) и столько же столбцов сколько существует входные параметры к sys.
lsim( симулирует ответы нескольких моделей динамической системы к той же входной истории и строит эти ответы на одной фигуре. Все системы должны иметь то же количество вводов и выводов. Можно также использовать sys1,sys2,...,sysN,u,t,___)x0 и method входные параметры при вычислении ответов многоуровневых моделей.
y = lsim(sys,u,t)y, произведенный в те же времена t как вход. Для систем одно выхода, y вектор из той же длины как t. Для мультивыходных систем, y массив, имеющий столько же строк, сколько существуют выборки времени (length(t)) и столько же столбцов сколько существует выходные параметры в sys. Этот синтаксис не генерирует график.
[ возвращает траектории состояния y,tOut,x] = lsim(___)x, когда sys модель в пространстве состояний. x массив со столькими же строк, сколько существуют выборки времени и столько же столбцов, сколько существуют состояния в sys. Этот синтаксис также возвращает выборки времени, используемые для симуляции в tOut.
lsim( открывает Линейный Инструмент Симуляции. Для получения дополнительной информации об использовании этого инструмента для линейного анализа смотрите Работу с Линейным Инструментом Симуляции (Control System Toolbox).sys)
Рассмотрите следующую передаточную функцию.
sys = tf(3,[1 2 3])
sys =
3
-------------
s^2 + 2 s + 3
Continuous-time transfer function.
Чтобы вычислить ответ этой системы к произвольному входному сигналу, обеспечьте lsim с вектором времен t в котором вы хотите вычислить ответ и векторный u содержа соответствующие значения сигналов. Например, постройте отклик системы к сползающему сигналу шага, который запускается в 0 во время t = 0, пандусы от 0 в t = 1 к 1 в t = 2, и затем содержит устойчивый в 1. Задайте t и вычислите значения u.
t = 0:0.04:8; % 201 points
u = max(0,min(t-1,1));Используйте lsim без выходного аргумента, чтобы построить отклик системы к сигналу.
lsim(sys,u,t)
grid on
График показывает прикладной вход (u,t) в сером и отклике системы синего цвета.
Используйте lsim с выходным аргументом, чтобы получить данные о симулированном отклике.
y = lsim(sys,u,t); size(y)
ans = 1×2
201 1
Векторный y содержит симулированный отклик в соответствующие времена в t.
Используйте gensig (Control System Toolbox), чтобы создать периодические входные сигналы, такие как синусоиды и прямоугольные волны для использования с lsim. Симулируйте ответ на прямоугольную волну следующей модели в пространстве состояний SISO.
A = [-3 -1.5; 5 0]; B = [1; 0]; C = [0.5 1.5]; D = 0; sys = ss(A,B,C,D);
В данном примере создайте прямоугольную волну с периодом 10 с и длительностью 20 с.
[u,t] = gensig("square",10,20);gensig возвращает векторный t из временных шагов и векторного u содержа соответствующие значения входного сигнала. (Если вы не задаете шаг расчета для t, затем gensig генерирует 64 выборки на период.) Используют их с lsim и постройте отклик системы.
lsim(sys,u,t)
grid on
График отображает прикладную прямоугольную волну серым и отклик системы синего цвета. Вызовите lsim с выходным аргументом, чтобы получить значения отклика в каждой точке в t.
[y,~] = lsim(sys,u,t);
Когда вы симулируете ответ системы дискретного времени, временной вектор t должен иметь форму Ti:dT:Tf, где dT шаг расчета модели. Симулируйте ответ следующей передаточной функции дискретного времени к входу шага пандуса.
sys = tf([0.06 0.05],[1 -1.56 0.67],0.05);
Эта передаточная функция имеет шаг расчета 0,05 с. Используйте тот же шаг расчета, чтобы сгенерировать временной вектор t и сползавший шаг сигнализирует о u.
t = 0:0.05:4; u = max(0,min(t-1,1));
Постройте отклик системы.
lsim(sys,u,t)

Чтобы симулировать ответ системы дискретного времени к периодическому входному сигналу, используйте тот же шаг расчета с gensig сгенерировать вход. Например, симулируйте отклик системы к синусоиде с периодом 1 с и длительностью 4 с.
[u,t] = gensig("sine",1,4,0.05);Постройте отклик системы.
lsim(sys,u,t)

lsim позволяет вам строить симулированные отклики нескольких динамических систем на той же оси. Например, сравните ответ с обратной связью системы с ПИ-контроллером и ПИД-регулятором. Создайте передаточную функцию системы и настройте контроллеры.
H = tf(4,[1 10 25]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
Сформируйте системы с обратной связью.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1);
Постройте ответы обеих систем к прямоугольной волне с периодом 4 с.
[u,t] = gensig("square",4,12); lsim(sys1,sys2,u,t) grid on legend("PI","PID")

По умолчанию, lsim выбирает разные цвета для каждой системы, которую вы строите. Можно задать цвета и стили линии с помощью LineSpec входной параметр.
lsim(sys1,"r--",sys2,"b",u,t) grid on legend("PI","PID")

Первый LineSpec R задает пунктирную красную линию для ответа с ПИ-контроллером. Второй LineSpec B задает чисто синюю линию для ответа с ПИД-регулятором. Легенда отражает заданные цвета и стили линии. Для большего количества опций настройки графика используйте lsimplot.
В системе MIMO, на каждом временном шаге t, вход u(t) вектор, длина которого является количеством входных параметров. Использовать lsim, вы задаете u как матрица с размерностями Nt- Nu, где Nu количество системных входных параметров и Nt длина t. Другими словами, каждый столбец u входной сигнал, применился к соответствующему системному входу. Например, чтобы симулировать систему с четырьмя входными параметрами для 201 временного шага, обеспечьте u как матрица четырех столбцов и 201 строки, где каждая строка u(i,:) вектор из входных значений в iвременной шаг th; каждый столбец u(:,j) сигнал, примененный в jth вводится.
Точно так же выход y(t) вычисленный lsim матрица, столбцы которой представляют сигнал в каждой системе выход. Когда вы используете lsim построить симулированный отклик, lsim обеспечивает отдельные оси для каждого выхода, представляя отклик системы в каждом выходном канале к входу u(t) примененный во всех входных параметрах.
Рассмотрите 2D вход, модель в пространстве состояний с тремя выходами со следующими матрицами пространства состояний.
A = [-1.5 -0.2 1.0;
-0.2 -1.7 0.6;
1.0 0.6 -1.4];
B = [ 1.5 0.6;
-1.8 1.0;
0 0 ];
C = [ 0 -0.5 -0.1;
0.35 -0.1 -0.15
0.65 0 0.6];
D = [ 0.5 0;
0.05 0.75
0 0];
sys = ss(A,B,C,D);Постройте ответ sys к прямоугольной волне периода 4 с, к которым применяются первый вход sys и импульс применился к второму входу каждые 3 с. Для этого создайте вектор-столбцы, представляющие прямоугольную волну и импульсный сигнал с помощью gensig. Затем сложите столбцы во входную матрицу. Чтобы гарантировать два сигнала имеют то же количество выборок, задают то же время окончания и шаг расчета.
Tf = 10; Ts = 0.1; [uSq,t] = gensig("square",4,Tf,Ts); [uP,~] = gensig("pulse",3,Tf,Ts); u = [uSq uP]; lsim(sys,u,t)

Каждая ось показывает ответ одной из трех систем выходные параметры к сигналам u примененный во всех входных параметрах. Каждый график также отображает все входные сигналы серым.
По умолчанию, lsim симулирует модель, принимающую, что все состояния являются нулем в начале симуляции. При симуляции ответа модели в пространстве состояний используйте дополнительный x0 входной параметр, чтобы задать ненулевые значения начального состояния. Рассмотрите следующую модель в пространстве состояний SISO с двумя состояниями.
A = [-1.5 -3;
3 -1];
B = [1.3; 0];
C = [1.15 2.3];
D = 0;
sys = ss(A,B,C,D);Предположим, что вы хотите позволить системе развиваться из известного набора начальных состояний без входа в течение 2 с, и затем применять модульное ступенчатое изменение. Задайте векторный x0 из значений начального состояния, и создают входной вектор.
x0 = [-0.2 0.3];
t = 0:0.05:8;
u = zeros(length(t),1);
u(t>=2) = 1;
lsim(sys,u,t,x0)
grid on
Первая половина графика показывает свободную эволюцию системы от значений начального состояния [-0.2 0.3]. В t = 2 существует ступенчатое изменение к входу, и график показывает отклик системы этому новому сигналу, начинающемуся со значений состояния в то время.
Когда вы используете lsim с выходными аргументами это возвращает данные о симулированном отклике в массиве. Для системы SISO данные об ответе возвращены как вектор-столбец той же длины как t. Например, извлеките ответ системы SISO к прямоугольной волне. Создайте прямоугольную волну с помощью gensig.
sys = tf([2 5 1],[1 2 3]);
[u,t] = gensig("square",4,10,0.05);
[y,t] = lsim(sys,u,t);
size(y)ans = 1×2
201 1
Векторный y содержит симулированный отклик на каждом временном шаге в t. (lsim возвращает временной вектор t как удобство.)
Для системы MIMO данные об ответе возвращены в массиве размерностей N ny ню, где Ny и Ню являются количеством выходных параметров и входными параметрами динамической системы. Например, рассмотрите следующую модель в пространстве состояний, представляя систему с тремя состояниями двумя входными параметрами и тремя выходными параметрами.
A = [-1.5 -0.2 1.0;
-0.2 -1.7 0.6;
1.0 0.6 -1.4];
B = [ 1.5 0.6;
-1.8 1.0;
0 0 ];
C = [ 0 -0.1 -0.2;
0.7 -0.2 -0.3
-0.65 0 -0.6];
D = [ 0.1 0;
0.1 1.5
0 0];
sys = ss(A,B,C,D);Извлеките ответы трех выходных каналов к прямоугольной волне, примененной в обоих входных параметрах.
uM = [u u]; [y,t] = lsim(sys,uM,t); size(y)
ans = 1×2
201 3
y(:,j) вектор-столбец, содержащий ответ в jth выход к прямоугольной волне, к которой применяются оба входных параметров. Таким образом, y(i,:) вектор из трех значений, выходных значений на ith временном шаге.
Поскольку sys модель в пространстве состояний, можно извлечь эволюцию времени значений состояния в ответ на входной сигнал.
[y,t,x] = lsim(sys,uM,t); size(x)
ans = 1×2
201 3
Каждая строка x содержит значения состояния [x1,x2,x3] в соответствующее время в t. Другими словами, x(i,:) вектор состояния на ith временном шаге. Постройте значения состояния.
plot(t,x)

Ответ Графика в качестве примера Нескольких Систем к Тому же Входу показывает, как построить ответы нескольких отдельных систем на одной оси. То, когда у вас есть несколько динамических систем, расположило в массиве моделей, lsim графики все их ответы целиком.
Создайте массив моделей. В данном примере используйте одномерный массив передаточных функций второго порядка, имеющих различные собственные частоты. Во-первых, предварительно выделите память для массива моделей. Следующая команда создает строку 1 на 5 нулевого усиления передаточные функции SISO. Первые две размерности представляют выходные параметры модели и входные параметры. Остальные измерения являются измерениями массива. (Для получения дополнительной информации о массивах моделей и как создать их, смотрите Массивы моделей (Control System Toolbox).)
sys = tf(zeros(1,1,1,5));
Заполните массив.
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
Постройте ответы всех моделей в массиве к входу прямоугольной волны.
[u,t] = gensig("square",5,15);
lsim(sys,u,t)
lsim использует тот же стиль линии для ответов всех записей в массиве. Один способ различать записи состоит в том, чтобы использовать SamplingGrid свойство моделей динамической системы сопоставить каждую запись в массиве с соответствующим w0 значение.
sys.SamplingGrid = struct('frequency',w0);Теперь, когда вы строите ответы в графическом окне MATLAB, можно кликнуть по трассировке, чтобы видеть, какому значению частоты это соответствует.
Загрузите данные об оценке, чтобы оценить модель.
load(fullfile(matlabroot,'toolbox','ident','iddemos','data','dcmotordata')); z = iddata(y,u,0.1,'Name','DC-motor');
z iddata объект, который хранит 2D выходные данные об оценке с одним входом с шагом расчета 0,1 с.
Оцените модель в пространстве состояний порядка 4 с помощью данных об оценке z.
[sys,x0] = n4sid(z,4);
sys предполагаемая модель и x0 предполагаемые начальные состояния.
Симулируйте ответ sys использование тех же входных данных как тот, используемый для оценки и начальных состояний, возвращенных командой оценки.
[y,t,x] = lsim(sys,z.InputData,[],x0);
Здесь, y отклик системы, t временной вектор, используемый для симуляции и x траектория состояния.
Сравните симулированный отклик y к измеренному отклику z.OutputData для обоих выходных параметров.
subplot(211), plot(t,z.OutputData(:,1),'k',t,y(:,1),'r') legend('Measured','Simulated') subplot(212), plot(t,z.OutputData(:,2),'k',t,y(:,2),'r') legend('Measured','Simulated')

Выбор шага расчета может решительно влиять на результаты симуляции. Чтобы проиллюстрировать почему, рассмотрите следующую модель второго порядка.
Симулируйте ответ этой модели к прямоугольной волне с периодом 1 с, с помощью шага расчета 0,1 с.
w2 = 62.83^2;
sys = tf(w2,[1 2 w2]);
tau = 1;
Tf = 5;
Ts = 0.1;
[u,t] = gensig("square",tau,Tf,Ts);
lsim(sys,u,t)
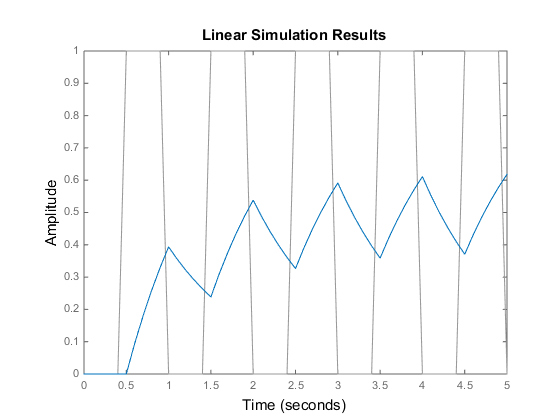
lsim симулирует модель с помощью заданного входного сигнала, но это выдает предупреждение, что входной сигнал субдискретизируется. lsim рекомендует шаг расчета, который генерирует по крайней мере 64 выборки на период входа u. Чтобы видеть, почему эта рекомендация имеет значение, симулируйте sys снова с помощью шага расчета, меньшего, чем рекомендуемый максимум.
figure
Ts2 = 0.01;
[u2,t2] = gensig("square",tau,Tf,Ts2);
lsim(sys,u2,t2)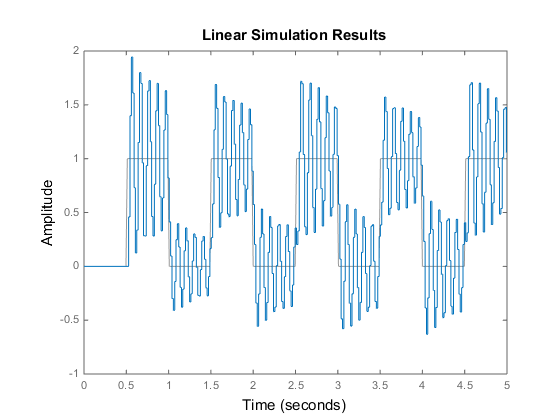
Этот ответ предоставляет сильное колебательное поведение, которое скрыто в субдискретизируемой версии.
Когда вам будут нужны дополнительные опции настройки графика, использовать lsimplot вместо этого.
Для передаточной функции дискретного времени,
lsim фильтрует вход на основе рекурсии, сопоставленной с этой передаточной функцией:
В течение дискретного времени zpk модели, lsim пропускает вход через серию первого порядка или секций второго порядка. Этот подход старается не формировать полином числителя и полином знаменателя, который может вызвать числовую нестабильность для моделей высшего порядка.
Для моделей в пространстве состояний дискретного времени, lsim распространяет уравнения пространства состояний дискретного времени,
Для систем непрерывного времени, lsim сначала дискретизирует системное использование c2d, и затем распространяет получившиеся уравнения пространства состояний дискретного времени. Если вы не задаете в противном случае с method входной параметр, lsim использует метод дискретизации задержки первого порядка, когда входной сигнал является гладким, и нулевой порядок содержит, когда входной сигнал прерывист, такой что касается импульсов или прямоугольных волн. Шаг расчета для дискретизации является интервалом dT между выборками времени вы предоставляете в t.
impulse | lsiminfo | lsimplot | sim | step | gensig (Control System Toolbox) | initial (Control System Toolbox)