Симулируйте ответ идентифицированной модели
sim(___) строит симулированный отклик идентифицированной модели.
Загрузите данные об оценке.
load iddata2 z2
Оцените модель в пространстве состояний третьего порядка.
sys = ssest(z2,3);
Симулируйте идентифицированную модель с помощью входных каналов из данных об оценке.
y = sim(sys,z2);
Загрузите данные и получите идентифицированную модель.
load iddata2 z2 sys = n4sid(z2,3);
sys оцененное использование модели в пространстве состояний третьего порядка метода подпространства.
Создайте набор опции симуляции, чтобы добавить шум в симулированный ответ модели.
opt1 = simOptions('AddNoise',true);Симулируйте модель.
y = sim(sys,z2,opt1);
Гауссов белый шум по умолчанию отфильтрован шумовой передаточной функцией модели и добавлен к симулированному ответу модели.
Можно также добавить собственный шумовой сигнал, e, использование NoiseData опция.
e = randn(length(z2.u),1); opt2 = simOptions('AddNoise',true,'NoiseData',e);
Симулируйте модель.
y = sim(sys,z2,opt2);
Загрузка данных.
load iddata1 z1
Задайте опцию оценки, чтобы оценить начальное состояние.
estimOpt = ssestOptions('InitialState','estimate');
Оцените модель в пространстве состояний и возвратите значение предполагаемого начального состояния.
[sys,x0] = ssest(z1,2,estimOpt);
Задайте начальные условия для симуляции
simOpt = simOptions('InitialCondition',x0);Симулируйте модель и получите ответ модели и стандартное отклонение.
[y,y_sd] = sim(sys,z1,simOpt);
Загрузите данные об оценке и оцените модель в пространстве состояний.
load iddata1 z1 sys = ssest(z1,2);
Возвратите стандартное отклонение и утвердите траекторию.
[y,y_sd,x] = sim(sys,z1);
Загрузите данные об оценке и оцените модель в пространстве состояний.
load iddata1 z1 sys = ssest(z1,2);
Создайте набор опции симуляции и задайте начальные состояния.
opt = simOptions('InitialCondition',[1;2]);Задайте ковариацию начальных состояний.
opt.X0Covariance = [0.1 0; 0 0.1];
Вычислите стандартные отклонения симулированного отклика, y_sd, и траектория состояния, x_sd.
[y,y_sd,x,x_sd] = sim(sys,z1,opt);
Получите идентифицированную модель.
load iddata2 z2 sys = tfest(z2,3);
sys idtf модель, которая инкапсулирует передаточную функцию третьего порядка, оцененную для результатов измерений z2.
Симулируйте модель.
sim(sys,z2)

Симулируйте одно вход одно выход нелинейная модель ARX вокруг известной точки равновесия с уровнем на входе 1 и уровень на выходе 10.
Загрузите выборочные данные.
load iddata2Оцените нелинейную модель ARX из данных.
M = nlarx(z2,[2 2 1],'treepartition');Оцените текущие состояния основанных на модели на прошлых данных. Задайте столько же прошлых выборок, сколько существуют задержки в переменных ввода и вывода (2 здесь).
x0 = data2state(M,struct('Input',ones(2,1),'Output',10*ones(2,1)));
Симулируйте модель с помощью начальных состояний, возвращенных data2state.
opt = simOptions('InitialCondition',x0);
sim(M,z2,opt)
Продолжите симуляцию нелинейной модели ARX от конца предыдущей запущенной симуляции.
Оцените нелинейную модель ARX из данных.
load iddata2 M = nlarx(z2,[2 2 1],'treepartition');
Симулируйте модель с помощью первой половины входных данных z2. Запустите симуляцию с нулевых начальных состояний.
u1 = z2(1:200,[]); opt1 = simOptions('InitialCondition','zero'); ys1 = sim(M,u1,opt1);
Запустите другую симуляцию с помощью второй половины входных данных z2. Используйте те же состояния модели от конца первой симуляции.
u2 = z2(201:end,[]);
Установить начальные состояния для второй симуляции правильно, входа u1 пакета и выход ys1 от первой симуляции в один iddata объект. Передайте эти данные как начальные условия для следующей симуляции.
firstSimData = [ys1,u1];
opt2 = simOptions('InitialCondition',firstSimData);
ys2 = sim(M,u2,opt2);Проверьте эти две симуляции по сравнению с полной симуляцией с помощью всех входных данных z2. Во-первых, извлеките полный набор входных данных.
uTotal = z2(:,[]); opt3 = simOptions('InitialCondition','zero'); ysTotal = sim(M,uTotal,opt3);
Постройте эти три ответа ys1, ys2 и ysTotal. ys1 должно быть равно первой половине ysTotal. ys2 должно быть равно второй половине ysTotal.
plot(ys1,'b',ys2,'g',ysTotal,'k*')

График показывает что эти три ответа ys1, ys2, и ysTotal перекройтесь как ожидалось.
Оцените начальные состояния модели M таким образом, что, ответ лучше всего совпадает с выходом в наборе данных z2.
Загрузите выборочные данные.
load iddata2;Оцените нелинейную модель ARX из данных.
M = nlarx(z2,[4 3 2],wavenet('NumberOfUnits',20));Оцените начальные состояния M лучше всего соответствовать z2.y в симулированном отклике.
x0 = findstates(M,z2,Inf);
Симулируйте модель.
opt = simOptions('InitialCondition',x0);
ysim = sim(M,z2.u,opt);Сравните симулированный выход ysim модели с выходным сигналом в z2.
time = z2.SamplingInstants;
plot(time,ysim,time,z2.y,'.')
Запустите симуляцию модели около устойчивого состояния, где входом, как известно, является 1, но выход неизвестен.
Загрузите выборочные данные.
load iddata2Оцените нелинейную модель ARX из данных.
M = nlarx(z2,[4 3 2],'wavenet');Определите значения состояния равновесия для входа 1 и неизвестный целевой выход.
x0 = findop(M,'steady',1, NaN);Симулируйте модель с помощью начальных состояний x0.
opt = simOptions('InitialCondition',x0);
sim(M,z2.u,opt)
Загрузите выборочные данные.
load iddata2Создайте модель Хаммерстайна-Винера.
M = nlhw(z2,[4 3 2],[],'pwlinear');Вычислите установившиеся значения рабочей точки, соответствующие уровню на входе 1 и неизвестный уровень на выходе.
x0 = findop(M,'steady',1,NaN);Симулируйте модель с помощью предполагаемых начальных состояний.
opt = simOptions('InitialCondition',x0);
sim(M,z2.u)
Серийные данные времени загрузки и оценка модель AR с помощью подхода наименьших квадратов.
load iddata9 z9 sys = ar(z9,6,'ls');
Для данных временных рядов задайте желаемую продолжительность симуляции, N = 200 использований набора входных данных N-0.
data = iddata([],zeros(200,0),z9.Ts);
Установите начальные условия, чтобы использовать начальные выборки временных рядов как исторические выходные выборки.
IC = struct('Input',[],'Output',z9.y(1:6)); opt = simOptions('InitialCondition',IC);
Симулируйте модель.
sim(sys,data,opt)

Используйте исторические данные ввода - вывода в качестве прокси для начальных условий при симуляции модели. Вы сначала симулируете использование sim команда и задает исторические данные с помощью simOptions опция установлена. Вы затем воспроизводите симулированный выход путем ручного отображения исторических данных с начальными состояниями.
Загрузите 2D вход, набор данных с одним выходом.
load iddata7 z7
Идентифицируйте модель в пространстве состояний пятого порядка с помощью данных.
sys = n4sid(z7,5);
Разделите набор данных в две части.
zA = z7(1:15); zB = z7(16:end);
Симулируйте модель с помощью входного сигнала в zB.
uSim = zB;
Симуляция требует начальных условий. Значения сигналов в zA исторические данные, то есть, они - значения ввода и вывода в течение времени, сразу предшествующего данным в zB. Используйте zA как прокси для необходимых начальных условий.
IO = struct('Input',zA.InputData,'Output',zA.OutputData); opt = simOptions('InitialCondition',IO);
Симулируйте модель.
ysim = sim(sys,uSim,opt);
Теперь воспроизведите выход путем ручного отображения исторических данных с начальными состояниями sys. Для этого используйте data2state команда.
xf = data2state(sys,zA);
xf содержит значения состояния sys в то время момент сразу после новой выборки данных в zA.
Симулируйте систему с помощью xf как начальные состояния.
opt2 = simOptions('InitialCondition',xf);
ysim2 = sim(sys,uSim,opt2);Постройте выход sim команда ysim и вручную вычисленные результаты ysim2.
plot(ysim,'b',ysim2,'--r')

ysim2 совпадает с ysim.
Когда начальные условия предполагаемой модели и системы, которая измерила набор данных валидации, отличаются, симулированный и измеренные отклики могут также отличаться, особенно в начале ответа. Чтобы минимизировать это различие, оцените использование значений начального состояния findstates и используйте ориентировочные стоимости, чтобы установить InitialCondition использование опции simOptions. Для примера смотрите Ответ Модели Соответствия на Выходные данные.
Симуляция означает вычислять ответ модели с помощью входных данных и начальных условий. sim симулирует следующую систему:
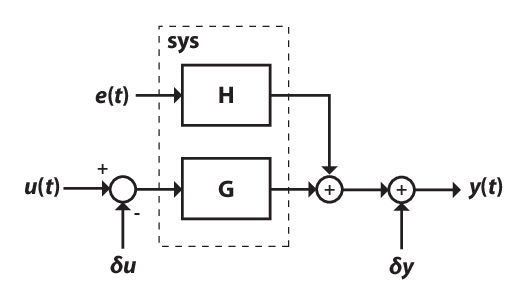
Здесь,
u (t) является входными данными симуляции, udata.
y (t) является симулированным выходным ответом.
G является передаточной функцией от входа до выхода и задан в sys. Начальные условия симуляции, как задано использование simOptions, установите начальное состояние G.
e (t) является дополнительным шумовым сигналом. Добавьте шум в свою симуляцию путем создания a simOptions набор опции и установка AddNoise опция к true. Кроме того, можно изменить шумовой сигнал по умолчанию путем определения NoiseData опция.
H является шумовой передаточной функцией и задан в sys.
δu является дополнительным входным смещением, вычтенным из входного сигнала, u (t), прежде чем вход будет использоваться, чтобы симулировать модель. Задайте вход, возмещенный путем установки InputOffset использование опции simOptions.
δy является дополнительным выходным смещением, добавленным к выходному ответу, y (t), после симуляции. Задайте выход, возмещенный путем установки OutputOffset использование опции simOptions.
Для получения дополнительной информации об определении начальных условий симуляции видят смещения ввода и вывода и шумовые данные сигнала, simOptions. Для данных о мультиэксперименте можно задать эти опции отдельно для каждого эксперимента.
Использование simsd для метода Монте-Карло вычисления стандартного отклонения ответа.
sim расширяет lsim упростить дополнительные функции, относящиеся к идентифицированным моделям:
Симуляция нелинейных моделей
Симуляция с аддитивным шумом
Объединение смещений сигнала
Расчет стандартного отклонения ответа (только линейные модели)
Симуляция частотного диапазона (только линейные модели)
Симуляции с помощью различного междемонстрационного поведения для различных входных параметров
Чтобы получить симулированный отклик без любой из предыдущих операций, использовать lsim.
compare | findstates | forecast | idinput | lsim | predict | simOptions | simsd | step
